转向扭矩传感器浅析
2022-01-25姜姗姗姜楠韩小鹏
姜姗姗 姜楠 韩小鹏
摘 要:本文系统介绍了应用于电动助力转向系统的扭矩传感器分类、工作原理,同时阐述了关键性能指标及各个指标的一般要求。并从传感器的角度匹配和输出电压与扭杆关系两个角度探讨了传感器与EPS系统的匹配性,对后续扭矩传感器的开发具有指导意义。
关键词:扭矩传感器 工作原理 性能指标
Abstract:This article systematically introduces the classification and working principle of torque sensors used in electric power steering systems, and at the same time expounds the key performance indicators and the general requirements of each indicator. And from the perspective of sensor matching and the relationship between output voltage and torsion bar, the matching of the sensor and EPS system is discussed, which has guiding significance for the development of subsequent torque sensors.
Key words:torque sensor, working principle, performance index
电动助力转向系统英文全称Electronic Power Steering,简称EPS。EPS是在机械转向系统的基础上,根据输入信号,通过电子控制装置使电机产生相应大小和方向的辅助力,协助驾驶员进行转向操作,并获得最佳转向特性的伺服系统。
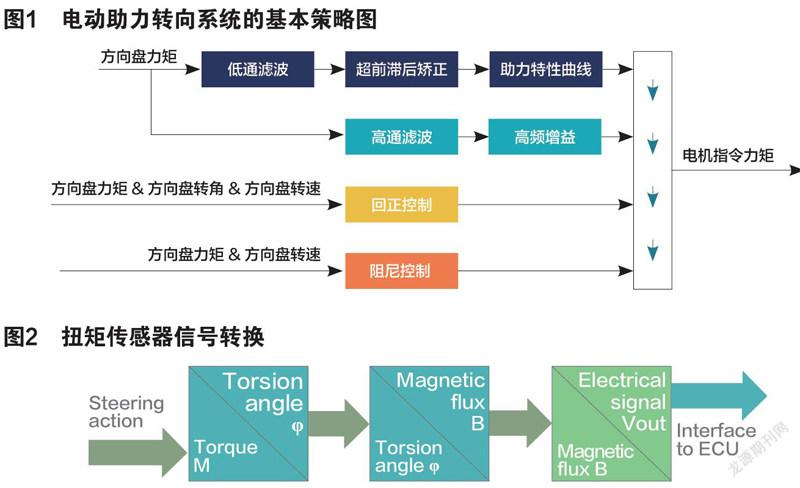
一般来说,电动助力转向系统的基本策略如图1所示,可见其所有基本控制模块均需要输入方向盘力矩信号。
方向盘力矩信号是通过扭矩传感器来获取。本文将对应用于电动助力转向系统的扭矩传感器的分类、工作原理、性能指标及系统匹配展开阐述。
1 扭矩传感器概述
传感器是根据规定的被测量的大小,定量提供有用的电输出信号的部件,狭义来讲,传感器就是把光、时间、电、温度、压力及气体等的物理化学量转换成电信号的变换器。
应用于电动助力转向系统的扭矩传感器就是通过特定的敏感元件,将转矩物理量转换成电信号,并集成有信号处理电路的变换器,如图2所示。
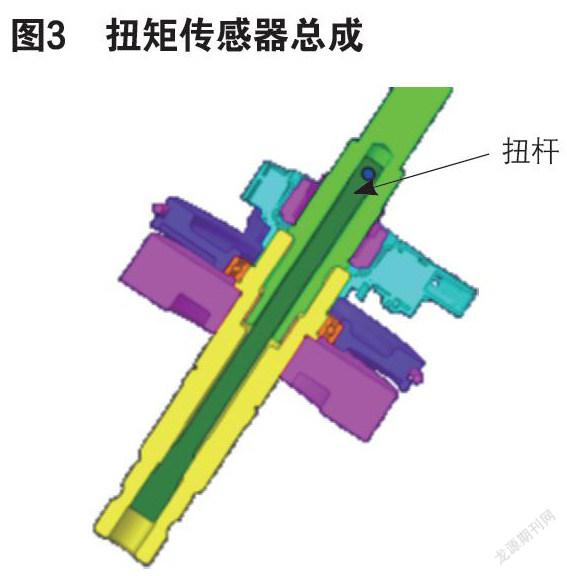
扭矩传感器与扭杆组装在一起构成扭矩传感器总成,方向盘转动时,扭杆与扭矩传感器的上半部分和下半部分存在一个相对偏转角,扭矩传感器就是通过检测这个相对转角来测量方向盘力矩的。如图3所示。
2 分类
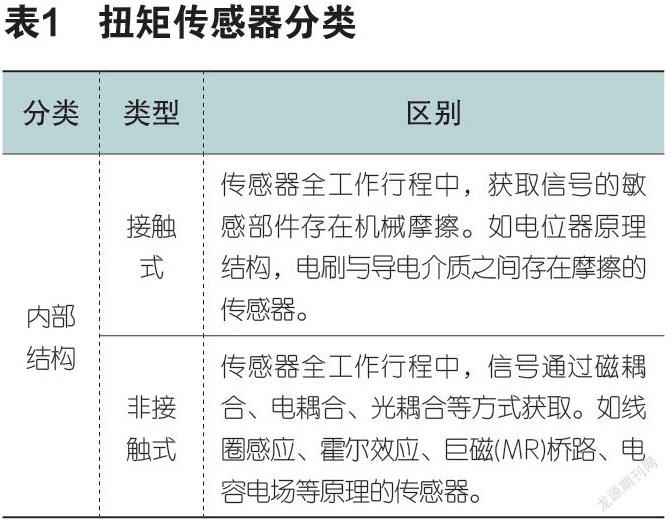
按照内部结构分类可分为接触式传感器和非接触式传感器,如表1所示。
接触式传感器由于传感元件之间一直存在滑动摩擦,因此在使用过程中容易受到磨损老化,出现测量信号不准确甚至报错的情况。这种类型的传感器已经逐渐被淘汰,非接触式传感器成为市场主流。
本文主要介绍应用较为广泛的非接触式扭矩传感器:霍尔式扭矩传感器。
3 工作原理
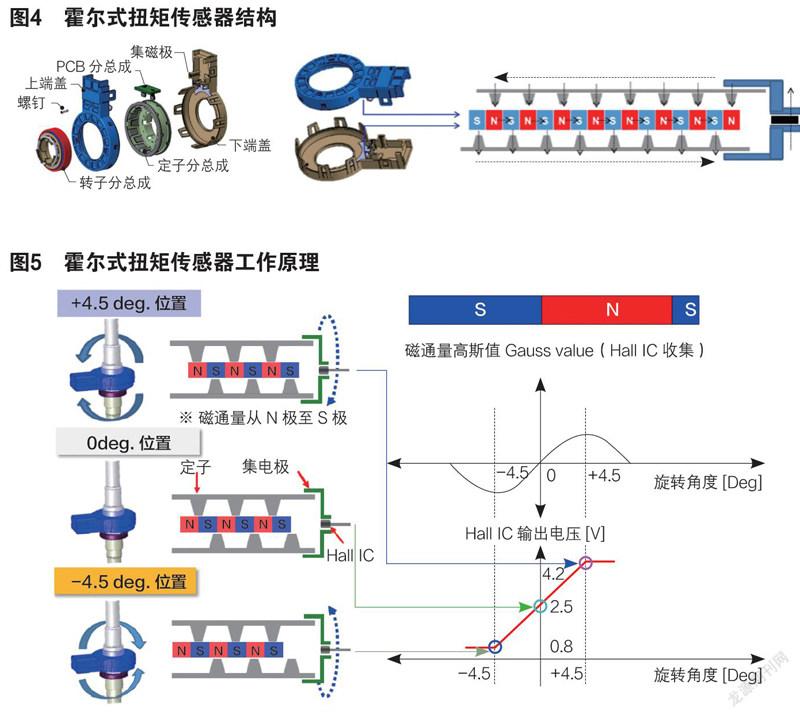
该扭矩传感器通过霍尔效应在导体的两端产生电势差。主要由定子分总成、转子分总成、上端盖、下端盖、集磁极、Hall IC组成。转子由多级磁铁组成,固定在输入轴上,主要是提供磁场。定子上装有磁轭(导磁率比较高的金属材料),固定在下端盖上,下端盖与壳体固定。当方向盘向左转动时,传感器扭杆发生扭转变形,导致转子和定子发生转动,使得上下磁轭与多级磁铁发生错动,磁通量从N极至S极,Hall IC接收到磁通。如果转子与定子反方向相对位移,Hall IC也接收反向的磁通。磁通的变化经过霍尔IC 转换为相应的电压变化,从而测量出相应的扭矩大小和方向。如图4所示。
当方向盘在中间位置时,磁通量为零。当方向盘左转(+4.5°),磁通量高斯值为550(示例)。当方向盘右转(-4.5°),磁通量反向,高斯值为-550(示例),如图5所示。
4 性能指标
4.1 直线度
传感器输出量(电压)与输入量(扭矩)之间的实际关系曲线偏离理想直线的程度。一般要求:≤±2%。
4.2 迟滞
在测试行程内所有测试位置来回电压的差值。一般要求:≤1%。
4.3 電压波动
安装完成的EPS产品,360°旋转输出轴,传感器信号的电压变化。一般要求:0.08V(max)。
4.4 中位电压
判断转向管柱是否受到转向力的作用。中位电压:2.50V。
5 传感器与EPS系统的匹配性
5.1 传感器的角度匹配
(a)机械限位角度。当转向力增大时,限位机构无法再相对转动。此时限位机构所产生的角度称为机械限位角度。
(b)传感器有效角度。当转向力增大时,是指传递给ECU的信号中,产生有效助力的那部分信号,称为有效机械角度。
c、传感器的角度匹配
在设计总成和生产装配时,必须保证:机械限位角度>传感器有效角度。
5.2 传感器输出电压和扭杆的关系
传感器的输出电压最终是被ECU控制器进行采集的,而ECU通过计算传感器的电压信号,得知驾驶员转动方向盘扭矩的大小。那么就必须定义传感器电压和扭矩之间的关系。
如果传感器图纸中给定的是电压和角度的关系,那么就必须确定扭杆的刚度来最终确定输出信号。
5.3 扭杆刚度的计算
例:已知:U=3.5V;T=7.8Nm;K1=(1/3.5)V/°;
公式:
所以:K2=7.8/3.5;K2=2.23Nm/°
其中:
U:传感器输出电压,单位V;
T:扭矩,单位Nm
K1:传感器电压与角度的关系,单位为V/°,和传感器的类型有关。
K2:扭杆的刚度,单位为Nm/°,由扭杆的粗细和长短来确定。
6 结语
本文主要针对电动助力转向系统用扭矩传感器的工作原理、性能指标和系统匹配等方面进行了分析,对后续扭矩传感器的开发具有指导意义。
