基于BP 网络的小型无人机航迹预测
2022-01-24耿增显陈锦涛赵嶷飞
耿增显,陈锦涛,赵嶷飞,2,刘 宏
(1.中国民航大学空中交通管理学院,天津 300300;2.民航航班广域监视与安全管控技术重点实验室,天津 300300)
近年来,无人机运行智能化水平日益提高,特别是随着无人机自主运行技术、组网编队、智能避障技术、4G/5G 宽带通信技术等的发展,我国无人机产业发展迅猛,其应用领域和应用场景不断地深化拓展,已在我国国民经济和社会发展等方面得到了广泛应用[1]。与此同时,由于无人机种类繁多、结构多样、运行条件和环境差异大等因素,无人机运行特性难以精确描述,难以建立统一规范的无人机运动特性模型和航迹预测模型。
吴翰等[2]使用拉格朗日方程建立了无人机动力学模型,对比分析了仿真实验结果。云超等[3]针对中小型无人机运动特性,详细研究了无人机建模与仿真,并利用Matlab/Simulink 研究了无人机仿真系统设计。Jung 等[4]建立了无人机半物理仿真平台,可以实现无人机运动特性仿真研究。Senseable City Lab[5]利用 Sky Call 系统,通过设置飞行的速度、高度以及飞行目标点等数据,可以利用超声波传感器实现自主避障,开展无人机模拟仿真研究。李凌云[6]、詹桢等[7],李力等[8]分别针对具体问题,研究了利用BP 网络对具体对象进行分析和研究,结果表明BP 神经网络预测方法的有效性,BP 神经网络能够适应航迹预测及路径规划研究。
本文针对无人机运动特性及航迹预测问题,通过搭建小型无人机实际运行场景分析小型无人机飞行原理和运动特性;然后建立基于BP 神经网络的四旋翼无人机航迹预测模型,对模型的结构进行了研究;利用大疆SPARK 小型四旋翼无人机获取实际运行数据,用 MATLAB 建立仿真环境,对所建立的航迹预测模型进行仿真研究,仿真结果验证了模型的有效性。
1 无人机飞行原理
四旋翼无人机是目前应用最为广泛的无人机,根据机身结构的组成样式不同,可大致划分为“十”型和“X”型。本文以四旋翼无人机为例,说明其运动原理。4 旋翼无人机具有四个旋翼,4 个旋翼处于同一高度平面,分别为M1、M2、M3、M4。常规四旋翼无人机组成结构如图1 所示。
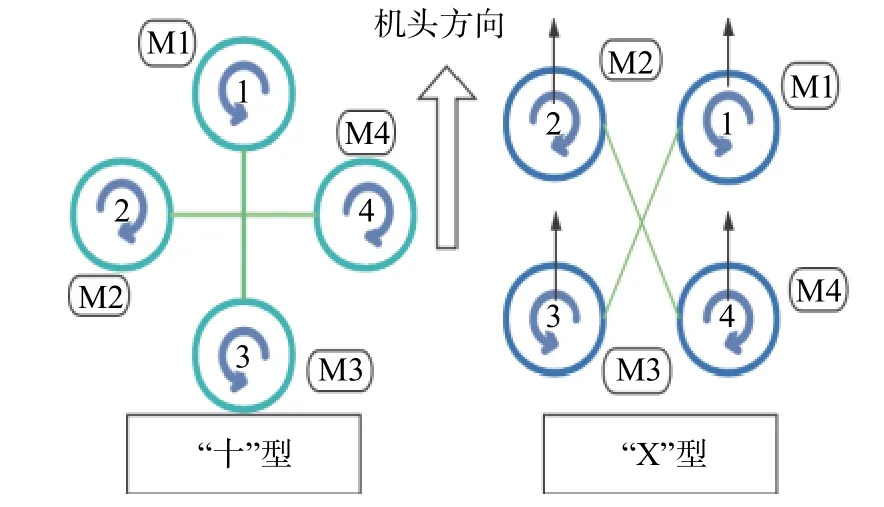
图1 四旋翼无人机旋翼结构
四旋翼无人机旋翼M1 和M3 逆时针方向旋转,旋翼M2 和M4 顺时针方向旋转。由位于两个轴向的旋翼反方向旋转方式抵消彼此扭矩,从而使四旋翼无人机能在空中保持预定方向飞行或悬停不动。四旋翼无人机的运动主要包括有垂直运动、俯仰运动、滚转运动、偏航运动。
1.1 垂直运动
四旋翼无人机垂直运动通过M1、M2、M3、M4 电机的转速。上升运动时,4 个旋翼转速均增加,水平方向稳定,当竖直方向上总的合力向上时,出现向上的加速度带动机体做加速上升;相反,垂直下降时,4 个旋翼均减速,水平方向稳定,当竖直方向上总的合力向下时,出现朝下的加速度带动机体做加速下降。
1.2 俯仰运动
四旋翼无人机俯仰运动可以理解为无人机“抬头”、“低头”运动。加大M3、M4 电机转速或者减小M1、M2 转速,使得机体向前绕Y轴做低头姿态,同时产生向前的分力,带动无人机向前做俯冲运动;同理,相反条件的操作下,无人机将绕Y轴呈现“低头”现象,并带有向后运动的趋势。
1.3 滚转运动
四旋翼无人机滚转实际上就是无人机绕X轴进行旋转。加大M1、M4 电机转速或者减小M2、M3 转速,使得机身在合力作用下绕X轴向左侧方向倾斜飞行;相反,减小M1、M4 转速或者加大M2、M3 转速,使得机身在合力作用下绕X轴向右侧方向倾斜飞行。
1.4 偏航运动
四旋翼无人机偏航运动减小M1、M3 电机的转速或者增大M2、M4 转速,使得机身在合力矩的作用下绕 Z 轴向左逆时针改航;相反,如需实现右偏航,只需增大M1、M3 电机转速或者减小M2、M4 转速,使得机身在合力矩的作用下绕 Z 轴向右逆时针改航。
根据以上分析可知,通过进行不同的旋翼组合,四旋翼无人机就可以实现无人机运动特性飞行。四旋翼无人机运动特性关系如表1 所示。
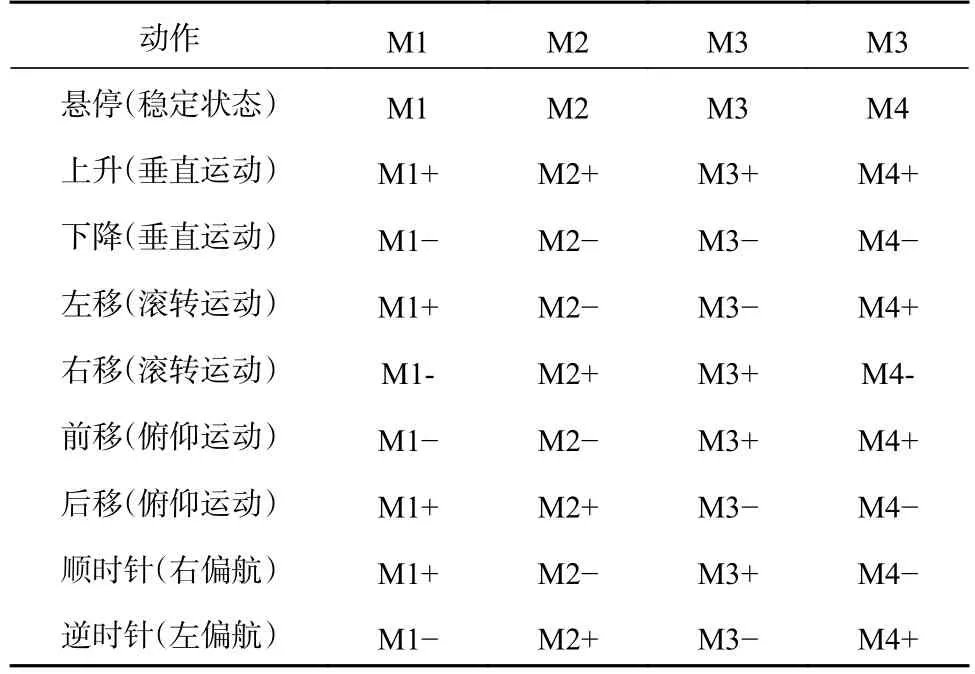
表1 四旋翼运动特性关系
2 BP 神经网络模型
2.1 BP 神经网络流程图
人工神经网络(Artificial Neural Network,ANN)体系包含大量处理单元(神经元Neurons),他们互联而成,依靠抽象、简化和模拟等系统工程处理过程,类同于大脑解决问题的特征,在人工智能迅速发展的时代可以很好地充当许多领域的基础算法[7−8]。反向传播(Back propagation,BP)神经网络是现阶段众多领域应用较为成熟的网络模型之一[7−8]。
BP 神经网络有两种处理过程。第一种是正向传播,它的处理方式是信号通过输入后经过一层层的单元处理传输到隐藏层,之后继续向输出层传输。在其信息的传递处理过程中,每一层的神经元只会对之后的单元造成影响,并不会在同级之间产生影响。当输出层并不能像预期的样子,无法获得正常的输出结果时,则传递处理过程进入第二种方式,通过把误差信息经过原路返回,并调整各权重,以达到误差最小化,实现最终的计算目的。典型的BP 神经网络流程图如图2 所示。
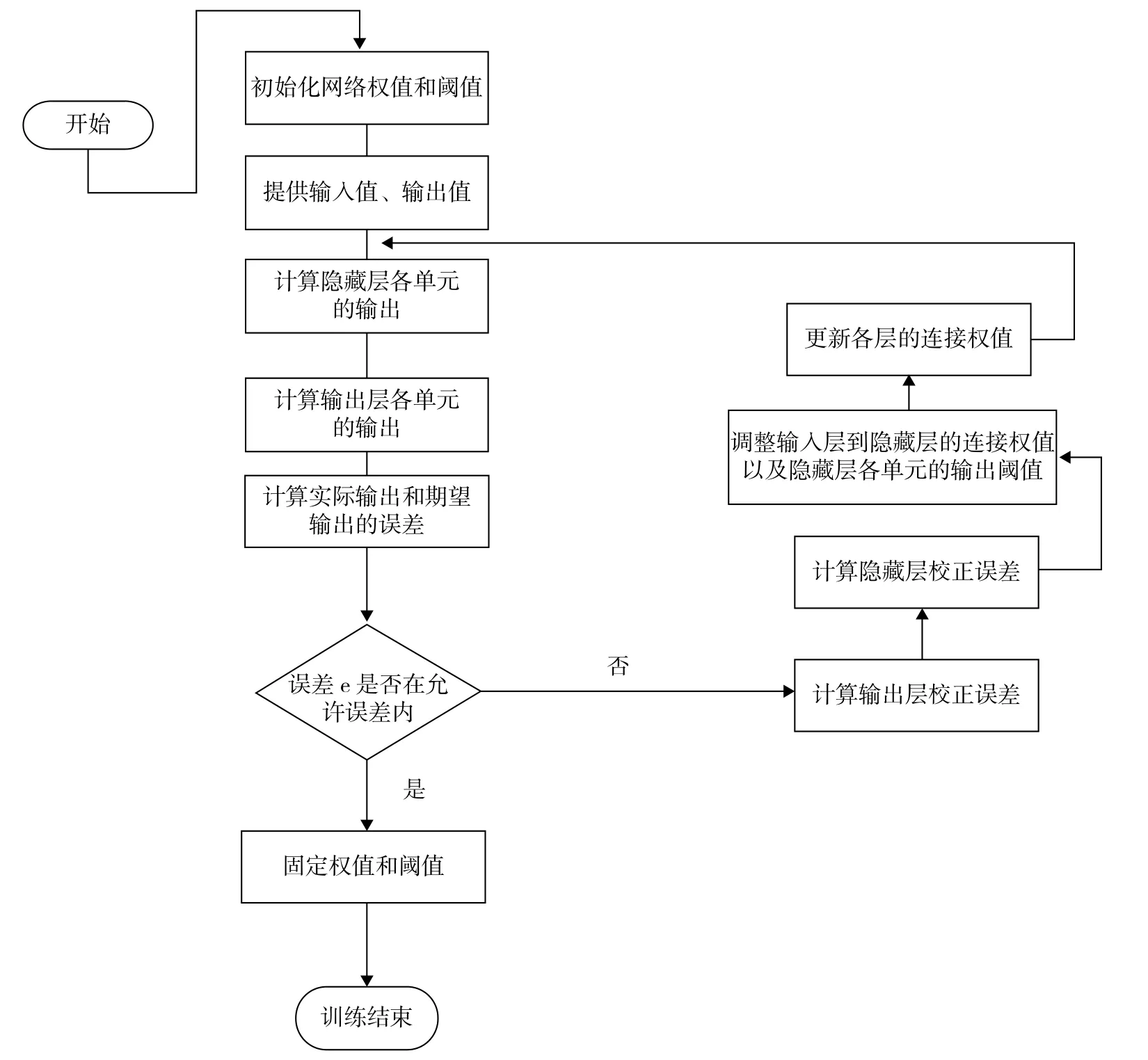
图2 BP 神经网络流程图
2.2 BP 网络结构设计
2.2.1 BP 网络结构
BP 神经网络结构分3 层,分别为输入层、隐含层和输出层。其中隐藏层又可以分为一层和多层,单个隐藏层和多个隐藏层的选择会导致神经网络内部计算过程发生很大的变化,进而影响模型的拟合度及预测结果的误差大小。综合考虑神经网络和航迹预测问题,本文选择单个隐藏层的最简化形式输入—隐藏—输出3 层神经网络来完成对四旋翼无人机航迹的预测问题。
根据前文对运动特性的分析,最终选择8 个输入作为BP 神经网络的输入变量,分别为无人机运动过程中的3 个线运动参数纵向位移(TX)、横向位移(TY)、垂直位移(TZ),角运动参数俯仰角(RX)、滚转角(RY)、偏航角(RZ),以及航向(Heading)和风(Wind)。输出为无人机飞行的4D 航迹,分别为时间(T)、纵向(X)、横向(Y)、垂直(Z) 轴方向的位移变化。BP 网络 拓扑图如图3所示。

图3 BP 神经网络结构拓扑图
2.2.2 隐藏节点
根据以往大量的文献论述,节点的多或者少都会影响神经网络的预测效果。节点数太少不仅导致网络模型的容错率下降,还影响预测结果;节点数过多则发生预测能力下降,计算时间过长等问题。本文选用根据经验公式和误差平方和确认,隐含层节点常用计算公式如式(1)所示。

式中:S为隐藏层节点数;U为输入节点数;V为输出节点数;a表示[1,10]的一个整数。隐含层节点个数范围为

因此本试验中选择隐藏层神经元层数为一层,个数为4~13 中的一个合适常数。
2.2.3 网络学习率确定
学习率(learning rate)是BP 神经网络在实际解决问题时的关键参数[7−8],它能起到调整网络模型的作用。在其模型训练时,如果学习率过大,将导致训练震荡或者函数发散;相反,学习率过小,发生训练收敛速度延缓变慢。为了得到可靠的模型,通过多次试验和经验选定学习率lr 为0.001。预测模型参数及初始化配置如表2 所示。

表2 仿真参数初始化配置
2.3 航迹预测模型
经过上述神经网络结构的分析和设计,BP 神经网络算法对于预测实际问题的研究流程变得更完善,对于航迹预测模型的实现提供了理论性的实验基础,也同时对该预测问题的输入参量、输出参量等分析得更加透彻。联系前文无人机运动特性的研究,结合本章预测性研究和网络结构设计的内容,并由于输入参量对航行风和飞行航向的考虑,同时加入风矢量和无人机速度两种运行参数,完成了最终所需的神经网络结构的航迹预测物理模型的搭建。

式中,Wn、We、Vn、Ve分别表示风向量在X轴方向分量、Y轴方向分量以及地球坐标系下无人机X,Y轴速度。
3 仿真研究
3.1 仿真数据
通过实验室运动捕捉系统设计无人机运动特性实验[9],获取相应的运动特性实验数据,并对数据进行预处理,将不合格数据剔除,按照下面的方法对数据进行归一化处理。

式中:Yi为归一处理结果;ei为处理前变量;emax和emin分别为最大值和最小值。
根据上述处理结果和仿真要求,选取400 组数据开展基于BP 网络的小型无人机航迹预测研究。400 组数据中其中200 组为输入样本,其余200 组为输出样本,以RX、RY、RZ、TX、TY、TZ、Heading、Wind 为参数输入,以T、TX、TY、TZ 为参数输出,默认隐藏层为10 个节点。神经网络模型输入值和输出值如表3、表4 所示。
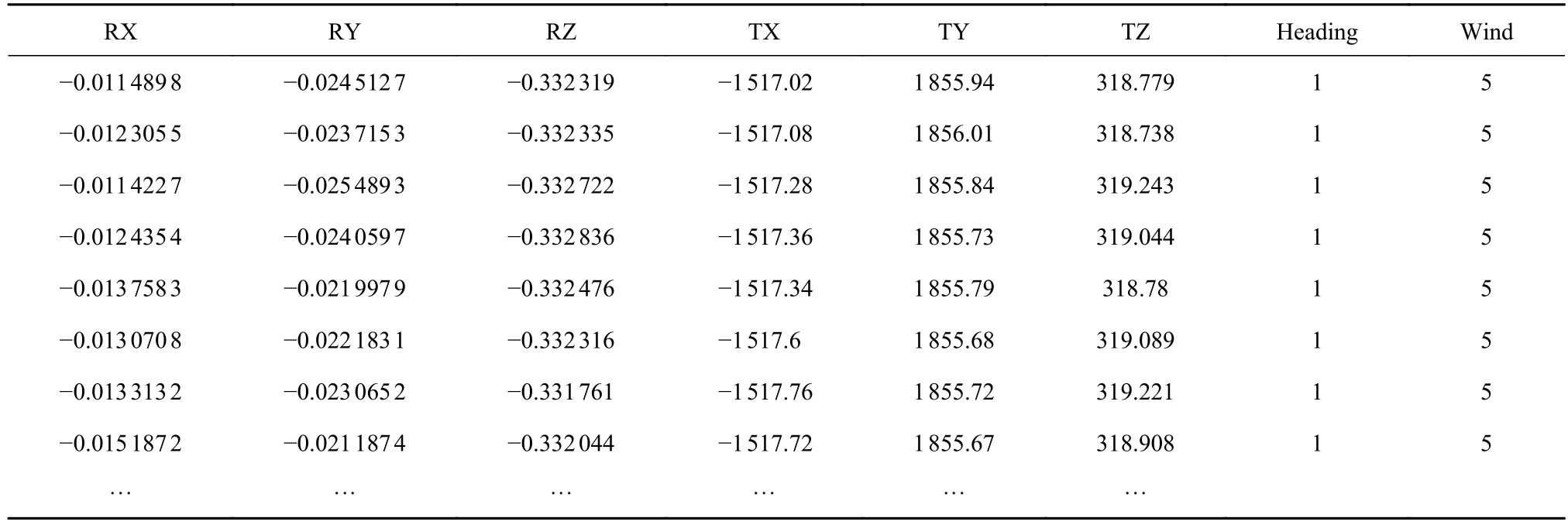
表3 神经网络模型输入值
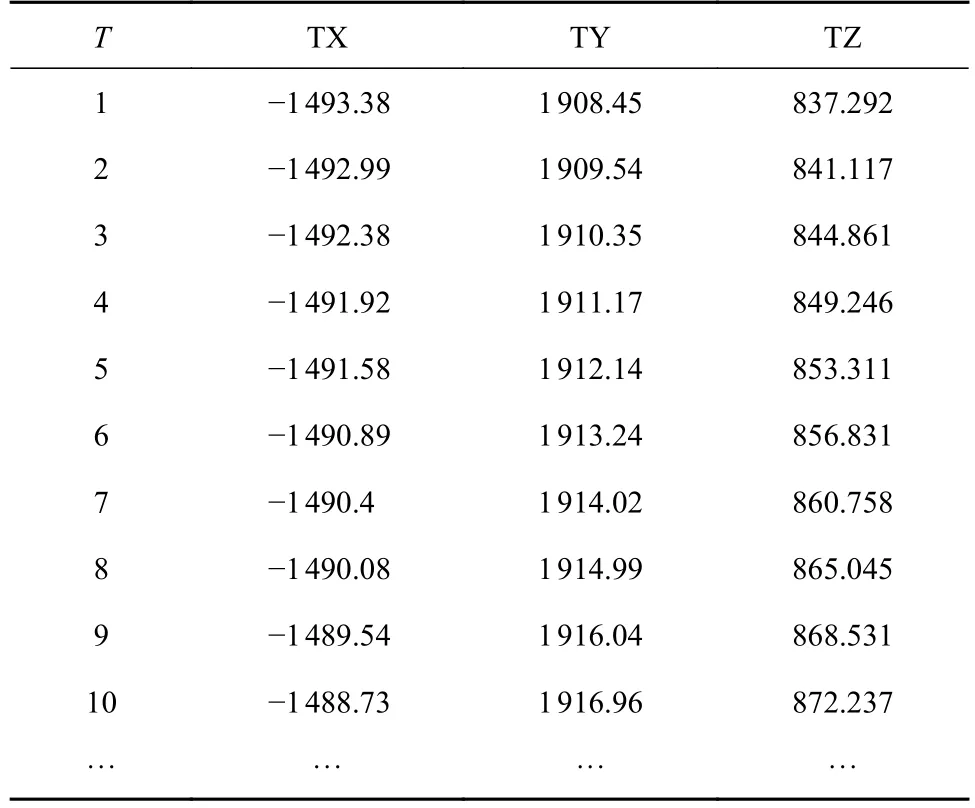
表4 神经网络模型输出值
3.2 仿真结果
将200 组输入数据和输出数据分别Matlab 导入,基于BP 网络工具箱进行研究,通过对搭建的8-10-4 数据网络结构进行充分的学习和训练,实现所需的预测网络结构。随后,将100 组预测数据进行导入,验证其解决问题的能力和可靠性,并通过选择获得预测数据。通过对预测数据的导出和简单处理,为后续航迹预测分析做数据支撑和准备。
神经网络重复的学习训练是为了通过函数的传递和模型的拟合来达到减小均方误差(MSE)的目的。图4 示出了神经网络进行到768 代epoch训练的情况,MSE 通过多次训练得到了最终训练效果0.281 18。

图4 神经网络8-10-4 层结构训练
图5 和图6 给出了BP 神经网络模型数据和实际航迹数据的绝对误差和相对误差。

图5 实际航迹数据与预测航迹数据绝对误差
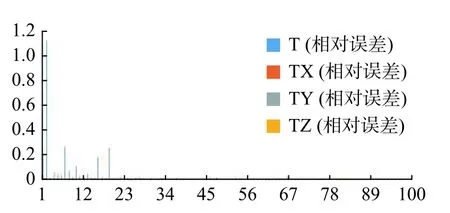
图6 实际航迹数据与预测航迹数据相对误差
值得注意的是,除个别数据的绝对误差较高之外,其余误差均明显较低,并且在相对误差的分析中,除了时间维度的误差相较于其余三组维度的误差较高,总的来说各维度数据均保持较低相对误差,由此表明BP 神经网络算法在无人机航迹预测领域具有很高的挖掘价值。
4 结论
本文基于BP 网络对小型无人机航迹进行预测,分析了无人机运动原理以及无人机基本运动特性,利用实际飞行数据,通过建立BP 神经网络预测模型对小型四旋翼无人机运动特性进行仿真研究。通过以上BP 神经网络模型的实际数据与预测数据的综合分析对比,发现基于神经网络算法进行航迹预测可以得到四旋翼无人机较为精准和可靠的航迹预测,可以很好地避免无人机的一些外部影响,减小预测的位置误差,增加航迹预测的稳定。仿真结果表明神经网络预测可以满足预期要求,验证了该模型在一定条件下可以实现相对准确的预测,说明了该预测模型有很好的发展和应用前景。
