基于FR-CNN算法的线路巡检元件故障识别仿真
2022-01-22田毓鑫蔡富东
田毓鑫,蔡富东
(山东理工大学电气与电子工程学院,山东 淄博 255049)
1 引言
线路部件在恶劣环境下容易出现雷击、异物损坏等问题,造成输电线路发生意外事故,因此需要对输电线路部件故障进行定期巡检和识别。线路巡线方式主要有人工巡线、无人机巡线,采用多种巡线方式可为监控线路工况提供现场实时视频或图像数据等。通过数字图象处理技术、浅层图象机器学习或深度学习等方法对电子设备进行观察,可以提高故障检测的效率,具有重要的工程应用价值[1]。
目前国内外采用的线路巡检元件故障识别方法,基本上都是针对某一类元件的特点设计提取特征的算法,然后根据选定的特征在图中判断目标是故障还是分类,因此,这些特征提取算法泛化性较差[2]。基于以上原因,提出FasterR-CNN(FR-CNN)算法,解决传统的线路巡检元件故障识别方法鲁棒性差,识别速度慢的问题。FR-CNN在区域建议网络中选取候选区域,将预测建议框数量限制在300个,从而大大提高了目标检测的速度。将FR-CNN算法应用于线路巡检元件故障识别工作中,旨在提高元件故障识别速度,同时保证识别精度。
2 线路巡检元件故障识别方法设计
2.1 划分线路巡检元件状态类型
因线路各元器件的安装位置、结构、电压、变电容量等不同,各元器件运行状态的影响因素也不同。线路巡检要素的状态可以划分成四种,分别为正常、注意、异常、严重。在“正常”状态下变压器各功能部件运行正常,各功能部件的评估参数值远低于规程规定的参考值,接近设备出厂值或在高质量产品值范围内变化;如有预测指标参数,预测指标参数也远低于注意值;无任何异常[3]。当电力变压器处于“注意”状态时,表明电力变压器的某些功能部件已经处于注意状态,即当功能部件单独进行评估时,某些评估指标的参数值达到了规程规定的关注值,或者因为其中的一些指标参数值呈现整体劣化趋势,因而使评估结果处于注意状态;或者因为变压器有历史的检修记录或家族缺陷史,所以需要密切关注这些指标的劣化趋势[4]。同时,还可以对不同的线路巡检元件进行分类,并将巡检元件在不同状态下的运行参数设置为比较特征,用于对线路巡检元件进行故障识别。
2.2 实时收集线路巡检图像
为提高巡线效率,保证在巡线过程中不撞塔和传输线,根据 GPS的定位功能,设计了一种基于巡线图像采集的巡线路径。对每一杆的 GPS定位按目标电网线路提供的位置进行选件,并在每一杆上依次悬停进行图像采集工作。在高压架空线路上,巡线机器人完成自主越障功能,但对障碍物的识别需要完全依靠摄像机,因此,摄像机的成像质量和后期的数据处理都会影响其越障能力[5-6]。选材 ALIENTEK推出ATK-OV5640-V11摄像机,OV5640有3种供电电压要求,分别为1.5 V、3.0 V和2.8 V。其供电电压要求 DVDD为1.5 V,AVDD和 DOVDD为2.8 V,AF-VCC为3.0 V,这三种电压等级的电压信号分别由 LDO稳压器提供。在完成所有杆塔拍摄后,为保证巡游机器人的安全移动,将巡游机器人设定为最高巡航高度,然后直线移动至起始点。巡检机器人的单程移动时间约为30分钟,两杆塔相距约150米,悬停拍摄时间约30 s,因此,巡检机器人可以对约9个杆塔进行巡检和返回,最终将巡检线路上的每帧图像都保存下来。
2.3 线路巡检图像预处理
按指标所占比例小于5%,在5%~12%之间,超过12%的指标分为小指标、中指标和大指标。最终仅对分为小目标和中目标的图像进行处理,对包含大目标的图像不进行剪切处理。先计算目标所占画幅的大小,然后对其中的小目标和中目标进行剪切,剪切后的图像与原始图像一起进行图像压缩、亮度变换、水平翻转等常规操作。这个扩展部分与原始图片集一起构成训练样本。
2.3.1 图像压缩处理
采用双线性差对采集的巡线图像进行压缩处理,首先计算缩放因子,设放缩前后的像素点分别为P0(x0,y0)和P(x,y)。放缩公式可以表示为

(1)
式中Hf和Vf分别表示的是水平和垂直方向上的压缩因子,srcWidth和dstWidth分别为原图长度和宽度,srcHeight和dstHeight分别为缩放后的长度和宽度[7]。遍历压缩图像中的每一个点(i,j)计算对应于原图中的坐标P0(x0,y0)公式如下

(2)
计算距离点P0最近的 4 个点坐标和权重,最终根据式(3)计算P0点坐标。
P0(x0,y0)=w1P1(x1,y1)+…+w4P4(x2,y2)
(3)
按照上述公式,依次遍历所有样本图像,进行图像压缩。在此基础上,只改变图像的大小,不会损失目标信息。
2.3.2 透视畸变校正
在获取图像时,如果摄像镜头的光轴不与间隔杆平面垂直,就会在像平面上产生透视几何失真,影响形状判断结果。所以,透视失真需要校正。当使用照相机拍摄时,图像的几何结构如图1所示。
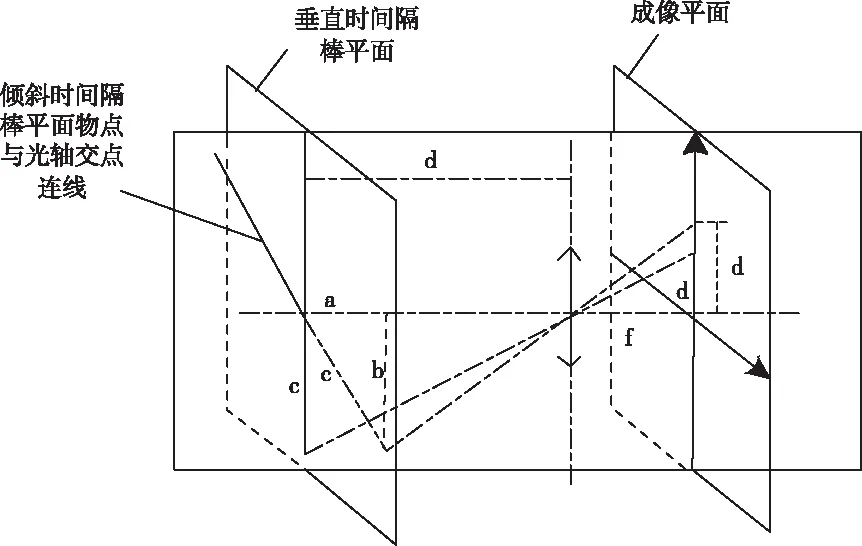
图1 几何成像关系图
平面上未畸变的理想坐标像点的极坐标为(ρ,θ),畸变像点为(ρ′,θ′),定义d为垂直物面与透镜之间的距离,c为物面上成像点到光轴与物面交点的距离,a、b分别为物面倾斜时物面与光轴及垂直物面的投影,f为焦距。基于图2中的成像关系,可以得到

(4)
由此可以得出
(5)
在此基础上,建立了理想图像的几何坐标与失真图像的几何坐标的相互关系,将整个图像的中心点作为极坐标原点[8]。依次将各理想图像的点坐标(ρ,θ)代入,可以得到相应畸变图像的点坐标(ρ′,θ′) ,再将该点坐标的像素值赋给理想坐标,即可实现畸变图像的校正。
2.4 构建FR-CNN网络模型
FR-CNN 的框架流程如图2所示。

图2 FR-CNN模型框图
FR-CNN模型中的RPN网络主要负责生成候选框的坐标以及是否为前景的分数。另一部分是负责FastR-CNN的检测模块。从总体上看,前向卷积网络用于提取特征,后向 RPN网络和FastR-CNN检测网络共享前向特征[9]。该网络在每一个特征图的锚节点上生成不同大小的候选框,该检测网络通过检测和识别该候选区域中的目标类别来确定该候选区域。网络模型中的损失函数下

(6)

2.5 提取线路巡检元件特征
利用FR-CNN网络模型,在 python上构建 tensorflow,从vgg16中提取图片中的信息,然后输入到后续的网络中进行分类和定位。在特征提取中,Vggl6型 CNN用于对线路巡检图像进行特征提取,该模型包括13个卷积层、13个 ReLu激活层和4个池化层。该网络模型采用层叠式结构,将多个3*3卷积核与1*1相结合,用3*3卷积核提取特征,用1*1卷积核降维数据[11]。而 VGGNet网络结构与以往卷积核的不同之处在于,它首次采用了小尺寸结构和层叠结构,卷积层均采用了3*3的卷积核结构,旨在代替大尺寸的卷积核,更有利于细节特征和高维数据特征的提取,少数网络还采用1*1的卷积核来代替3*3的卷积核,从而使整个网络的非线性度得到提高,参数数目大大减少。假设图层为卷积层,以彩色扫描图像为原始输入,将图层的输出特征向量表示为

(7)


(8)

2.6 实现线路巡检元件故障识别
2.6.1 防震锤元件故障识别
利用建立的FR-CNN网络模型,根据来自于分类器识别的待检测图像信息,以及含有防振锤的矩形区域,实现输电线路防振故障检测。由待测图像中的等效边比值 G来判断防振锤区域是否足够大,然后对防振锤区域进行裁减,公式如下
(9)
式中W和H分别为输入图像的高度和宽度,(x1,y1)和(x2,y2)分别是防振锤定位网络输出矩形区域的右下顶点坐标和左上定点坐标。在确定防振锤击区的同时,设置确定是否剪切的阈值R,并加入剪切层,加快防振锤击区故障检测过程[12]。采用基于深度学习的检测器网络为二级结构,输入的是由剪切层剪切出的含有防振锤的矩形区域,其中防振锤故障为检测目标,由于故障特征在图像中显示得很小,所以采用了一种更精细的目标检测器网络,即FR-CNN。利用FR-CNN网络可以实现不同尺寸待测图像的输入,输入图像通过网络后就可以得到图像上每个像素点的分布情况。防振锤上每一个点代表输入待测图像上对应的感觉区为防振锤概率,设置概率阈值,当某个点大于设定的阈值时,检测器判断该点对应的原待测图像上存在防振锤故障,当检测图像返回原图像时,防振锤故障得到准确识别。
2.6.2 间隔棒和绝缘子元件故障识别
隔离杆和绝缘子元器件故障的识别,主要是利用FR-CNN网络模型训练得到的故障数据与设定线路巡检元器件故障数据的相似性来获得识别结果。相似度测度的具体公式如下
(10)
式中σi和δi分别表示的是设置的特征向量和提取的巡检元件特征向量。若式(10)得出的计算结果大于门限值,则对应的状态即为间隔棒和绝缘子元件的识别结果。
3 仿真分析
3.1 配置仿真测试环境
识别性能测试实验有Linux、windows和VR三种实验环境。Linux环境主要用于构建caffe框架,培训和测试传输线部件识别和故障检测网络。利用HTCVIVIE相关设备对传输线进行虚拟巡检,实现人机交互。
3.2 设置识别性能评价指标
衡量识别精度的指标是mAP,指的是多个类别的平均准确率的平均值。AP指的是单个类别的平均准确率,衡量的是模型在该类别上识别效果的好坏,而mAP衡量的是模型在所有类别上识别效果的好坏,实际上,mAP就是求所有AP的平均值.mAP的值介于0-1之间,且越大表示该模型的识别准确率越好。实验中,用mAP来评判模型识别的效果。
3.3 识别性能测试结果分析
此次实验主要采用黑盒测试方式,就是设置线路巡检元件故障数据,将其转换为已知状态,并在此基础上分别利用三种不同的识别方法得出识别结果,将得出的识别结果与设置的数据进行比对,得出正确识别和错误识别的数量,最终得出的识别率测试结果,如表1所示。

表1 识别性能测试结果
从表1中可以看出,三种识别方法的mAP指标值分别为0.624、0.688和0.940,由此可见设计识别方法的平均准确率更高,识别精度更高。
在此基础上测试3种方法的线路巡检元件故障识别耗时情况,得到对比情况如图3所示。

图3 识别耗时对比情况
分析图3可知,文献[3]方法的识别耗时平均值为6.2s,文献[4]方法的识别耗时平均值为4.1s,所提方法的识别耗时平均值为1.0s。所提方法在线路巡检元件故障识别中的耗时较短,识别准确率较高,具有一定的应用性。
4 结束语
通过对设计的线路巡检元件故障识别方法进行测试,其最终平均识别率达到90%以上,符合实际应用需求,能够应用于实际生产生活中。