基于现场生产要求的码垛机器人工作站仿真设计
2022-01-20严伟
严伟
(湖南省工业技师学院,湖南岳阳,414000)
0 引言
码垛机器人由于占地面积小,工作到达区域大,码放精度高,故障率低,可以大幅度提高生产效率,减少人力投入,节约生产成本,可以很好的解决包装生产中出现的各种各样的问题,使得在实际生产中得到大量使用[1]。
1 现实的工作环境要求
现实的工作环境是要从传送链上把箱体搬运并码放到托盘上,每个托盘上码放5×2的箱体,第一层和第二层的码放的形式如图1所示。箱体的尺寸为0.6m×0.35m×0.2m,码垛工作区间为0.8m×0.8m×0.3m。托盘的尺寸为1.7m×1.3m,承重约为1吨。要求箱体之间的误差不能超过±6mm,每小时完成400箱的码垛。
2 码垛工作站的选型
根据现实的工作要求,选择市场上速度最快,距离可达到2.4米,最精确,精简度高,防护等级高,占地面积减少20%的机器人IRB 460[2]。箱体是固体,而且是固定尺寸。再根据抓取型抓手的特点是用于固体工件,最适合于固定尺寸的箱类,所以选择抓取型抓手[3]。
3 码垛工作站仿真模型的构建
根据前面的选型,在Robotstudio仿真软件ABB模型库中选择IRB 460,根据箱体尺寸的要求,利用三维建模软件(SW)设计抓手模型、托盘及底座,如图2所示。托盘使得箱体平稳码放,底座使叉车能够快速叉出。
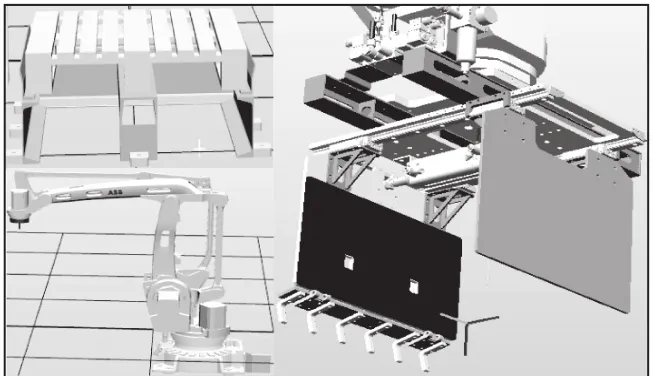
图2 仿真模型
4 码垛工作站仿真系统的构建
■4.1 系统的构建流程
第一步是模型的导入及布局:①导入模型并设定位置,②创建机器人系统;第二步是工件的纹理贴图:①工件贴图,②设定纹理坐标,③将工件保存为库文件;第三步是用Smart组件创建动态输送链:①设定输送链产品源,②设定输送链运动属性,③设定输送链限位传感器,④创建属性与连结,⑤创建信号与连接[4];第四步是用Smart组件创建动态夹具:①设定夹具属性,②设定检测传感器,③设定拾取放置动作,④创建属性与连结,⑤创建信号与连接;第五步是用Smart组件创建动态叉车:①创建叉车机械装置,②设定叉车移动动作,③设定叉车拾取放置动作,④创建信号与连接;第六步是配置编辑器和工作站逻辑的设定:①创建控制器单元和I/O信号,②设定工作站逻辑;第七步是编写离线程序并仿真:①第一层码垛程序的编写,②第二层码垛程序的编写;第八步是机器人码垛仿真设定与运行:①同步到VC,②仿真顺序的设定,③仿真运行。
■4.2 Smart组件创建动态输送链、动态抓手、动态叉车
用Smart组件创建动态输送链SC_ssl、动态抓手SC_zs、动态叉车SC_cc,其中Source(产品源),每触发一次,产生一个码垛产品复制品。Queue(队列),将同类型的物体做队列处理。LinearMover设定输送链的运动属性,表示运动的物体是队列Queue中的物体,运动方向是X轴的负方向。PlaneSensor(传感器),在输送链的末端设置传感器,以检测箱体是否到位。LineSensor(传感器),工具检测传感器,检测抓手下是否有箱体。Attacher(拾取动作),抓手拾取箱体。Detacher(释放动作),抓手把箱体释放到托盘上。zsjj表示抓手夹紧,zsgq表示抓手钩起。LinearMoverccxq使叉车向前移动到托盘处,LinearMoverccht使叉车向后移动到围栏外,Attachercc(抬起动作)叉车抬起托盘,Detachercc(释放动作)叉车把托盘放下,ccxs表示叉车货叉向上动作,ccxx表示叉车货叉向下动作。
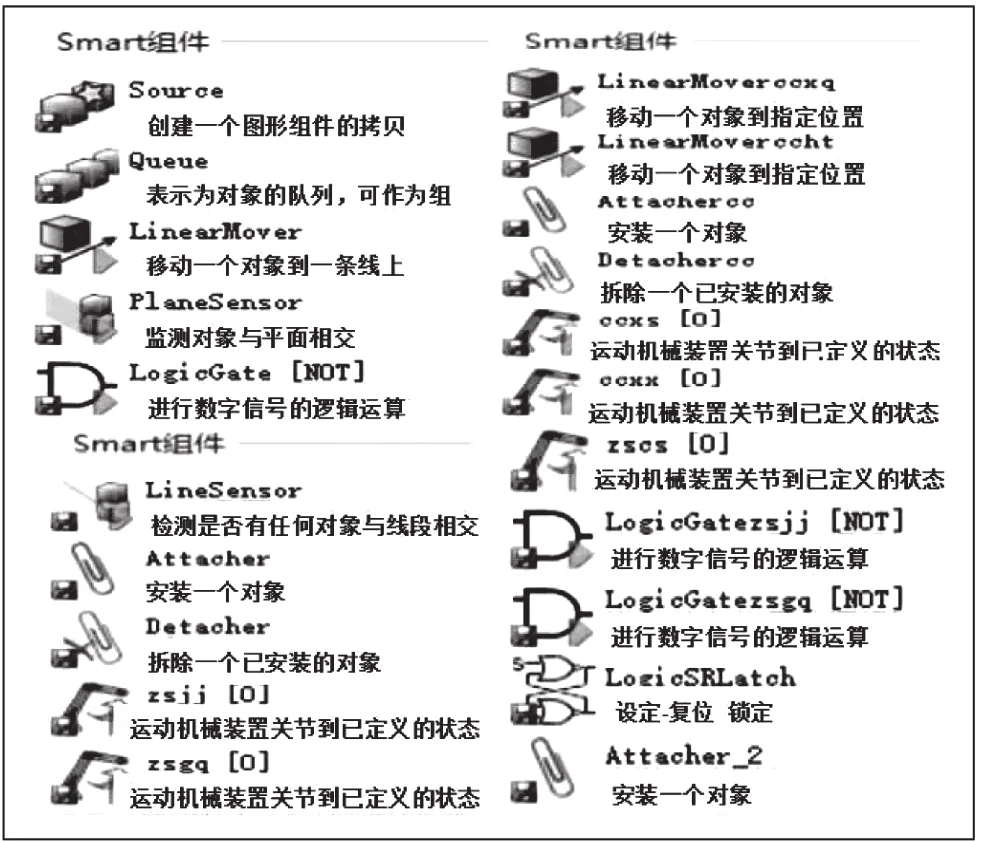
图3 Smart组件创建
■4.3 输送链、抓手、叉车I/O信号的设置
I/O信号是本工作站中自行创建的数字量信号,用于与各个Smart组件进行信号交互,I/O信号连接是指设定的I/O信号与Smart组件信号的连接关系以及各Smart组件信号之间的信号连接关系,如图4所示。

图4 输送链、抓手、叉车I/O信号的设置
disslks信号用于启动Smart输送链,自动产生一个复制品。产品源Source产生复制品的完成信号Executed触发Queue组件加入队列动作Enqueue,复制品自动加入队列。复制品与输送链末端的传感器PlaneSensor接触后SensorOut,触发 Queue退出队列动作 Dequeue ,输送链上的的箱子停止运动。将传感器PlaneSensor的输出信号SensorOut和非门LogicGate[NOT]相连接,非门的输出InputA变化和传感器的输出变化正好相反。用非门LogicGate[NOT]的输出信号Output触发Source的执行Execute,即当传感器信号由1变0时,触发产品源产生一个复制品。doxtdw用于箱体到位检测的输出信号。产品运动到输送链末端PlaneSensor和限位传感器接触后SensorOut,将产品到位信号doxtdw设置为1。dizsjj用于启动抓手的夹紧动作,用该信号触发传感器LineSensor开始执行检测,触发夹紧动作zsjj[0]执行。传感器LineSensor检测到物体之后SensorOut触发拾取动作Attacher执行Execute。 dizsgq用于启动抓手的钩起动作, dixtfj用于将码垛好的箱子附加到托盘上,dosqwc用于机器人拾取动作的完成信号。dicc启动Smart叉车。
■4.4 工作站I/0信号的设置
工作站I/0信号的设置目的是把Smart组件的输入输出信号与机器人端的输入输出信号进行关联,即把Smart组件的输出信号作为机器人端的输入信号,把机器人端的输出信号作为Smart组件的输入信号,如表1所示。比如机器人端GzzSystem的箱体到位检测输出信号doxtdw和Smart组件的输送链SC_ssl启动输入信号disslks相关联;Smart组件的抓手SC_zs机器人拾取动作的完成输出信号dosqwc和机器人端GzzSystem的机器人拾取动作的完成信号输入信号disqwc相关联。
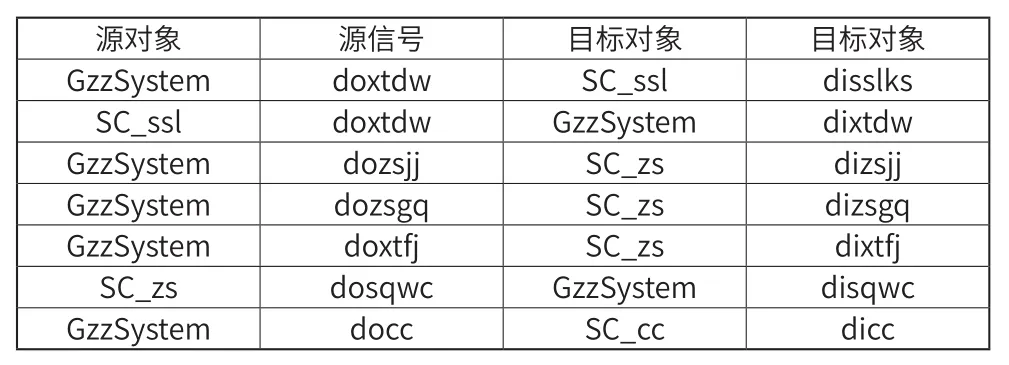
表1 工作站I/0信号的设置
5 仿真结果
根据本文的设计方法生成了码垛工作站整体,最后对工作站的进行仿真。从仿真结果可以看到,完成5×2箱体码垛,码垛机器人需要150s,如图5所示。从机器人将托盘装满,加上用叉车将箱体搬走,总计需要160s。按照这个工作过程,1小时将完成420个箱体的码垛,基本完成实际任务要求,使得生产线率大大提高。
6 结语
本文根据现场码垛工作要求,选择好码垛机器人和末端工具。通过三维建模软件(SW)和ABB Robotstudio仿真软件构建了码垛工作站仿真模型和系统,通过仿真结果分析,码垛箱体的数量和时间完全符合现场的要求,大大提高了工作效率,为企业码垛工作站的设计提供理论依据。
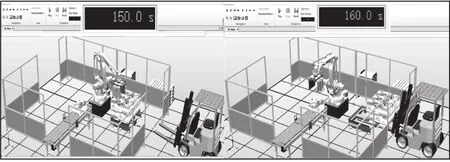
图5 仿真结果
