基于数字图像处理的路面裂缝识别关键技术研究
2022-01-13肖钟捷韩辉珍徐应明
肖钟捷,韩辉珍,徐应明
(武夷学院 数学与计算机学院,福建 武夷山 354300)
0 引言
目前,我国高速公路里程数已经是世界第一,中国高速公路的增速也是全球第一[1].庞大的公路里程数让公路养护需求变得尤其严峻,我国的公路建设已逐渐进入养护维修阶段,未来将会面临大量的路面检测工作,而传统的人工检测存在效率低、精度低、危险系数较高等缺陷.为提升养护成效,针对路面病害的检测方法,研究出快速、高效的自动检测识别系统已成为热点问题[2-3].
目前的路面裂缝检测系统多为车载式,其通过CCD摄像机实时采集路面图像帧序列,对含裂缝的图像进行图像增强和去噪,分割成包含裂缝的二值图像,并提取出裂缝的类型、长度、宽度等信息.如加拿大辉固-路德威(Fugro Roadware)公司积累了关于道路状况、道路资产和安全性等方面的数据信息将近40年的经验和创新,最终研发出ARAN系列的多功能道路检测车.该设备的摄像头可以在80km/h的速度下采集到高清晰图片,软件部分可以识别出裂缝类型和破损处的地理位置信息,但不能对采集到的裂缝图像进行实时处理,是当时最先进最准确的裂缝检测系统;南京理工大学和宁沪高速公路股份有限公司等多家合作单位共同研制推出的N-1型路面破损智能检测车能够实时地显示并标注裂缝的具体位置,但是薄弱的图像信息传输能力、检测精度的不准确和不够深入的定位方向是这个产品的缺点.大量的国内外研究人员针对道路、桥梁裂缝自动检测识别技术开展了研究,如:B.Chanda使用多尺度形态学方法对路面裂缝图像的裂缝边缘信息进行检测,该方法抗噪能力较强但效率不高;南京理工大学的徐威等[4]首先对裂缝图像进行灰度校正,通过对裂缝分别进行显著性粗尺度检测和显著性细尺度检测,然后加强空间显著性,削弱裂缝图像中的噪声显著性,最后对裂缝进行分割和提取,但有可能引入伪边缘.
从检测方法及检测设备的发展方向来看,基于计算机视觉(数字图像处理)的裂缝检测己成为该领域研究的主流方向.但从实际应用效果来看,路面的裂缝自动检测技术在速度与精确度上还存在较大的提升空间,现有技术尚不能满足实际需求.
本文通过实验提出一种基于差分阈值判断的改进中值滤波算法[5],既提高了图像的保真度,又达到去噪目的,并且能改善中值滤波去除大颗粒噪声的性能.采用大津阈值分割方法实现图像裂缝的分割提取,并通过变尺度结构元素实现对二值裂缝图像的形态学闭合运算以消除裂缝空隙及孤立点,实现裂缝的有效提取和识别;通过对标签化的二值裂缝图像的各个连通域识别处理,快速计算出各个连通域所含行、列像素数,即可判断出裂缝的横向、纵向属性,通过判断连通域的个数阈值,快速确认裂缝是否是复杂的网状裂缝;通过裂缝骨骼化可计算出裂缝的长度和面积,其整个裂缝图像的处理过程如图1所示[6].

图1 裂缝的识别过程Fig.1 Crack identification process
1 图像的预处理
要识别设备采集到的路面裂缝图像,必须先对图像进行预处理.设备采集的裂缝图像一般为RGB彩色图像,包含了由红(R)、绿(G)、蓝(B)三种成分组成的混合色彩信息.而计算机处理和识别的图像一般以只包含亮度信息的灰度图像为基础,故在进行图像处理、裂缝识别之前,首先应将采集到的RGB图像转换为灰度图像,图像的灰度化可采用加权平均法,在Matlab中的实现函数为rgb2gray()[7].
区别于一般图像,路面裂缝图像因受光照、阴影及坑槽等影响含有大量噪声,常用的边缘算子不能有效提取出裂缝病害,必须对图像进行增强和去噪等预处理[8].
图像增强的一般通用方法有线性灰度变化拉升和直方图处理.文中采用了图像的直方图均衡化处理,直方图均衡化处理是把原始图像的灰度直方图从比较集中的某个灰度区间变成在全部灰度范围内的均匀分布,对含裂缝的路面图像如图2(A)进行直方图均衡化处理的效果如图2(B)所示,经过这一步的图像增强预操作使图像得到匀光处理,使一些原本不易观察到的细节能变得清晰可辨,有利于后续对裂缝细节的提取,并且让图像裂缝与图像背景值得到更进一步的区分,提升了下一步中值滤波效果,便于后续的裂缝分割提取操作.
实验对比了常见的均值滤波、高斯滤波和中值滤波算法,这些算法都采用加权或不加权邻域值替换原像素值,造成了裂缝图像的不同程度失真.本文采用一种改进的基于阈值判断的中值滤波算法,不是简单地用排序后的邻域中间值代替原像素值,而是比较中间值与原像素值,如果超出一定的自适应阈值才替换.这样能保留绝大部分像素原来的值,提高了图像的保真度,又能达到去噪目的,并且能改善中值滤波去除大颗粒噪声的性能,既能保持裂缝边缘,滤波速度又快.如图2(E)所示,是采用本文中值滤波算法去噪预处理后提取的裂缝图像,而图2(D)是没有经过中值滤波预处理后提取的裂缝图像,显然图2(D)中含有大量白色颗粒噪声.
实验表明,经过图像增强和改进的中值滤波算法预处理,能有效去除针对路面粗糙特点的单独颗粒噪声,使后续可以得到较好的裂缝提取图像,如图2(E)所示.
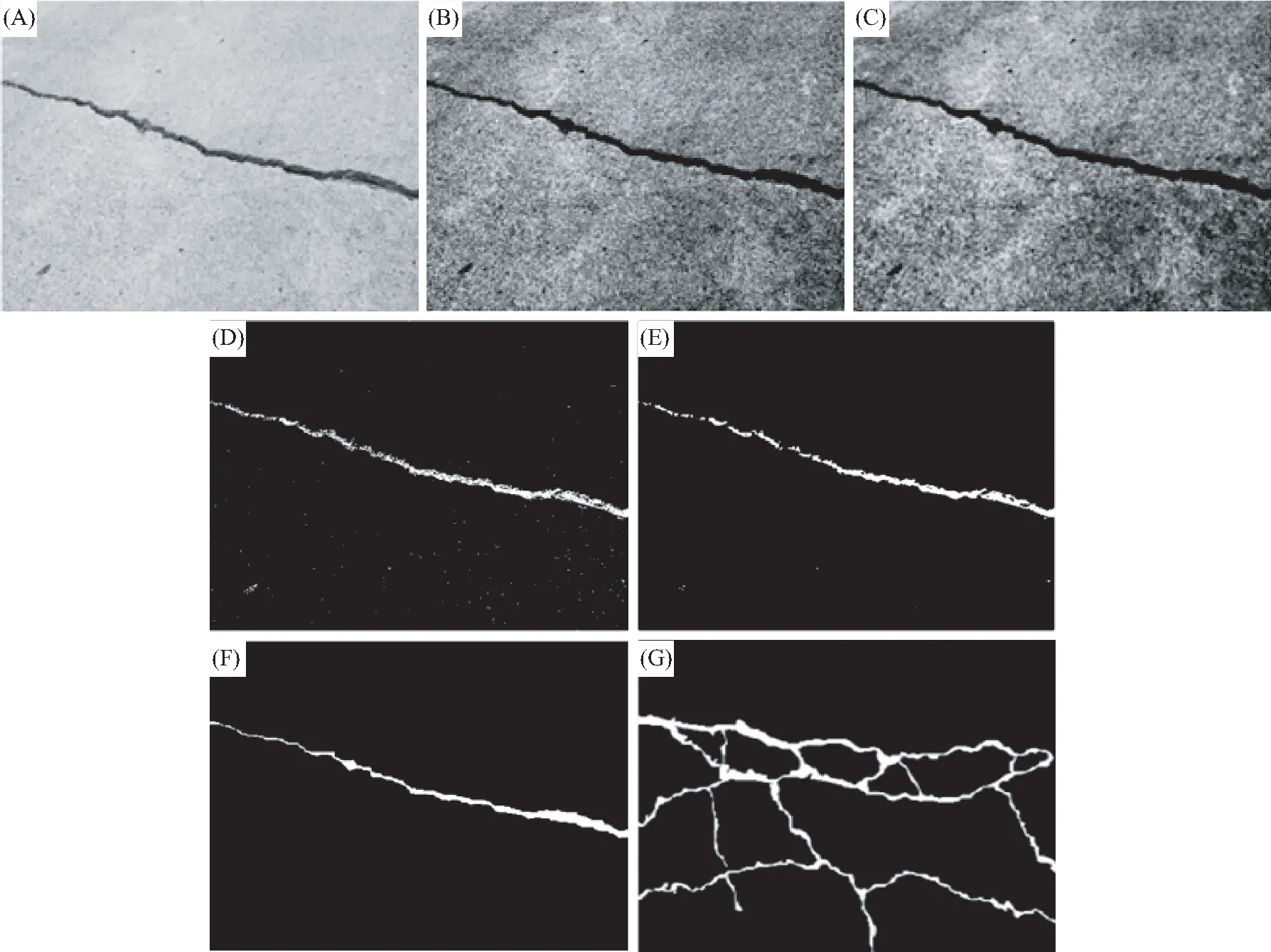
图2 灰度化的原图(A)、图像增强(B)、图像去噪(C)、含噪声的裂缝图像(D)、去噪滤波后得到的裂缝图像(E)、本文算法处理后得到的裂缝图像(F)、网状裂缝二值图像(G)Fig.2 Grayed original (A),Image enhance (B),Image denoising (C),Crack image with noise (D),Denoised crack image (E),The crack image obtained in this paper (F),Mesh crack binary image (G)
2 图像中裂缝的提取
图像分割是图像处理和分析识别中的关键步骤[8].目前还没有通用的图像分割算法,大多数的图像分割方法还是有针对于特定场景和特定目标的要求.图像分割的基本方法可以分为基于边缘和基于连通区域的划分:前者通常是使用窗口模板如Canny算子等,通过二维的卷积计算,将原始图像映射到新的二维特征空间即黑白图像;后者是基于域值的分割,通常利用形态学的知识直接将背景和目标判定为1或0,得到一个二值图像,通过图像的阈值分割将连续色调的灰度图像转变为黑白图像[9].
本文采用大津阈值分割方法对裂缝灰度图像进行域值分割得到裂缝二值图像,大津法是一种自动的无参数无监督的阈值分割算法,该算法遍历整幅图像所有的灰度范围内不同的阈值,基于不同阈值分别计算类间方差与类内方差,当类间方差达到最大值时,该阈值即为最佳阈值.如图2中的(D)、(E)、(F)三幅图像即为采用大津阈值法分割裂缝图像得到的结果.如图2(D)和2(E)的分割结果所示,分割后的二值裂缝图像仍存在一些细小的孤立噪声点和断裂的局部裂缝(如图3(A)所示),因此需要利用数学形态学的基本运算,滤除图像中的孤立点并将断裂的支缝连接起来,形成闭合贯通的裂缝图像,图2(F)即是结合变尺度形态学闭合运算修复裂缝空隙及去除孤立点后的裂缝分割结果.实验结果表明,与传统边缘检测算法相比,该算法具有应用简单、对裂缝的识别度高、抗干扰能力较强且准确率高的特点[6-10].
3 裂缝识别
在经过图像预处理及域值分割后得到的二值裂缝图像中[11],路面背景和裂缝目标分别由像素值为0和1的点组成,二值裂缝图像被分割成了分别由0和1组成的连通域.通过对二值裂缝图像的标签化,可以统计得到连通域的个数.如果只是简单的一条横向裂缝如图2(F)所示或纵向裂缝,则可知二值图像中的连通域个数为2;可见,根据连通域的个数可判断二值图像中的裂缝是线状还是网状的;简单的线状裂缝如图3(A)所示,对于一些小的连通域可能是一些杂质或颗粒噪声而不是裂缝,可以通过统计连通域中的像素数来判断是否裂缝,本文算法针对像素数少于600(如20*30)个像素的连通域清零,即判别为噪声,这样可去除那些虚假裂缝(噪声),得到只包含裂缝的连通域,结果是如图2(F)和图3(B)所示的二值裂缝图像[4,12].

图3 有多个连通域的二值裂缝图像(A)、只有2个连通域的二值裂缝图像(B)、线状二值裂缝图像的骨骼化(C)、去除毛刺后的二值裂缝图像骨骼(D)Fig.3 Cracks with multiple connected domains (A),Cracks with only 2 connected domains (B),Skeletonization of linear cracks (C),Deburring crack bones (D)
如图3(A)和图3(B)所示,对于简单的一个横向线状裂缝,在图3(A)中被分割成了多段裂缝(连通域),产生了误判;如图3(A)所示的二值图像必须进行如上节所述采用数学形态学运算,完成连通域的空隙填充及裂缝的连接操作后,再求取裂缝连通域(如图3(B)所示),根据该裂缝连通域(外接矩形)的矩形域属性(在Matlab中的实现函数为regionprops),可判断矩形区域的横、纵方向大小,由此可知该线状裂缝是横向裂缝还是纵向裂缝(如矩形框的横轴方向像素多即判定为横向裂缝);对于简单的横、纵向裂缝,可通过计算线状裂缝每一列的最大横坐标与最小横坐的差值,利用该差值再乘以与该坐标点相邻非零像素所形成夹角的余弦,计算得到裂缝的宽度;对二值裂缝图像进行骨骼化(如图3(C)和图3(D)所示),即将线状裂缝细化为单像素连成的图像(如图3(C)所示)并去除毛刺(如图3(D)所示),通过统计图3(D)中的非零像素个数即可计算出该线状裂缝的长度;而对于网状裂缝:可以通过计算二值图像中所有非零像素(属于裂缝的像素)的最大横坐标(Max_r)与最小横坐标(Min_r)的差值R(R=Max_r-Min_r);同理,可以计算出最大列坐标与最小列坐标的差值H.显然,R*H即为网状裂缝的面积[13-14].根据以上本文算法计算出的裂缝长度、宽度及面积,再乘以CCD摄像机分辨率(每个像素代表的实际长度),即可得到裂缝的实际特征值:长、宽和面积.
4 结语
本文通过实验研究了基于数字图像处理的路面裂缝自动识别算法中的图像预处理方法,通过直方图均衡化方法实现对灰度化图像的增强,利用改进的中值滤波算法实现对裂缝图像的快速去噪;在裂缝的提取时,采用大津阈值分割法,并利用形态学方法对二值裂缝图像予以修正,通过对二值裂缝图像中连通域的计算、填充和连接,能较快速、准确的得到裂缝.文中所提方法经实验验证,可以有效判断出线状裂缝的横、纵方向;通过连通域个数的计算,可区分裂缝是线状裂缝还是网状裂缝;并提出了快速计算出裂缝宽度、长度、面积等裂缝特征值的方法.但对复杂裂缝的宽度及面积信息还需进一步研究其更精确的计算方法.在识别图像裂缝时,也可以考虑探索应用BP神经网络等深度学习[15]方法,这些工作都有待于作进一步的研究.
