基于蓝牙的电控悬架远程调试控制器开发
2022-01-10李军伟张世龙张广世
陈 斌,李军伟,张世龙,张广世,李 凯,岳 涵
(1.山东理工大学交通与车辆工程学院,山东 淄博 255049;2.天润智能控制系统集成有限公司,山东 文登 264413)
0 引言
电控悬架又称电子控制空气悬架(简称ECAS)是汽车悬架系统发展的主要方向之一,相比于传统悬架,电控悬架能够按照车身当前的高度、轮胎的转向角度及速率、踏板的制动等参数,由悬架的ECU 控制悬架的执行机构,改变空气悬架的刚度、减振器的阻尼力及车身高度等参数,从而使汽车具有良好的乘坐舒适性、操纵稳定性以及通过性[1-2]。随着其电控化的程度越来越高,目前很多高档的乘用车、商用车都广泛采用电子控制空气悬架[3-5]。为了使用户能够更方便、舒适的调节空气悬架,本文设计一种基于蓝牙的远程控制电控悬架的控制器。
1 系统结构及原理
本系统使用飞思卡尔的MC9S08DZ60 单片机作为主控芯片,HC-05 模块作为蓝牙收发模块,此外,还有电源模块、CAN 通信模块。
蓝牙远程调试控制器通过蓝牙链路接收来自手机APP/ 车载蓝牙的指令信息,然后内部的HC-05 蓝牙模块将指令信息通过SCI 发送给单片机,单片机接收指令后,解析指令,提取关键信息打包成CAN 报文,通过CAN 总线发送给电控悬架ECU,电控悬架ECU 根据接收到的CAN 报文执行相应的动作。系统的总体结构框图如图1所示。

图1 系统结构框图
2 系统硬件电路设计
2.1 MC9S08DZ60单片机最小系统硬件设计
为了降低系统的功耗和成本,选用8 位低价位、高性价比的MC9S08DZ60 芯片作为控制芯片,该芯片具有最高达40 MHz 的CPU 工作频率,内含32 个中断/复位源,4 K 的片内RAM,60 KB 的片内在线可编程Flash 存储器[6]。单片机内部还搭载MSCAN(CAN 通信模块)、SCI(串口通信模块)、TPM(定时器模块)等功能,满足该系统的需求。电路图如图2 所示。

图2 DZ60 最小系统
DZ60 最小系统是指单片机能够稳定工作最简洁的电路。该电路由DZ60 单片机、晶振电路和下载调试接口电路组成。晶振电路给单片机提供稳定的时钟源,下载调试电路通过仿真器与PC 相连,方便开发过程为主控芯片下载、擦除程序。
2.2 HC-05蓝牙模块设计
HC-05 是CSR 主流蓝牙芯片,它是一款功能齐全、能耗低、价格便宜的蓝牙串口模块,是基于蓝牙规范 V2.0 带有增强速率的数传模块,该串口模块工作电压为3.3 V,可设置的波特率范围高达4 800~1 382 400 bit/s,蓝牙的工作频率为 2.4 GHz,可实现10 m 距离通信,实际应用中根据场地不同会有所增加[7-11]。
HC-05 模块在蓝牙远程调试控制器中直接与主控芯片进行连接,它是作为蓝牙APP 与主控芯片之间的数据通信桥梁,不仅负责数据的接收,也充当数据发送的角色。作为接收端时,负责接收用户通过APP 发送的指令;作为发送端时,负责将电控悬架各种状态信息反馈给APP。HC-05 模块与主控芯片进行连接时,主要是将HC-05 模块的串口发送端和接收端与单片机的串口接收端和发送端分别连接,其电路原理图如图3 所示。

图3 HC-05 电路原理图
HC-05 模块可以直接通过串口来进行控制并且串口电压要求为3.3 V,如果直接用单片机自带的串口(输出5 V)与蓝牙模块串口连接可能会因为电压过高烧毁芯片,因此,需要加一个转化电路(如图3 下半部分电路所示),图中NLSX4373 芯片是一款双电源双向自动感应转换器,VCC 的I/O 和VL 的I/O 端口分别分别接入5.0 V 和3.3 V 电源输入,可实现5.0 V 与3.3 V 之间相互转换。HC-05 模块电路图对应的引脚说明如表1 所示。

表1 HC-05模块引脚说明
2.3 电源模块设计
考虑到该控制器应用于车辆上,车载蓄电池的电压一般为12 V 或24 V,而单片机芯片供电电压要求为5 V,HC-05 蓝牙模块供电电压要求为3.3 V。因此,需要设计电压转换电路以满足各模块工作电压的需要。具体的电源电路如图4 所示。
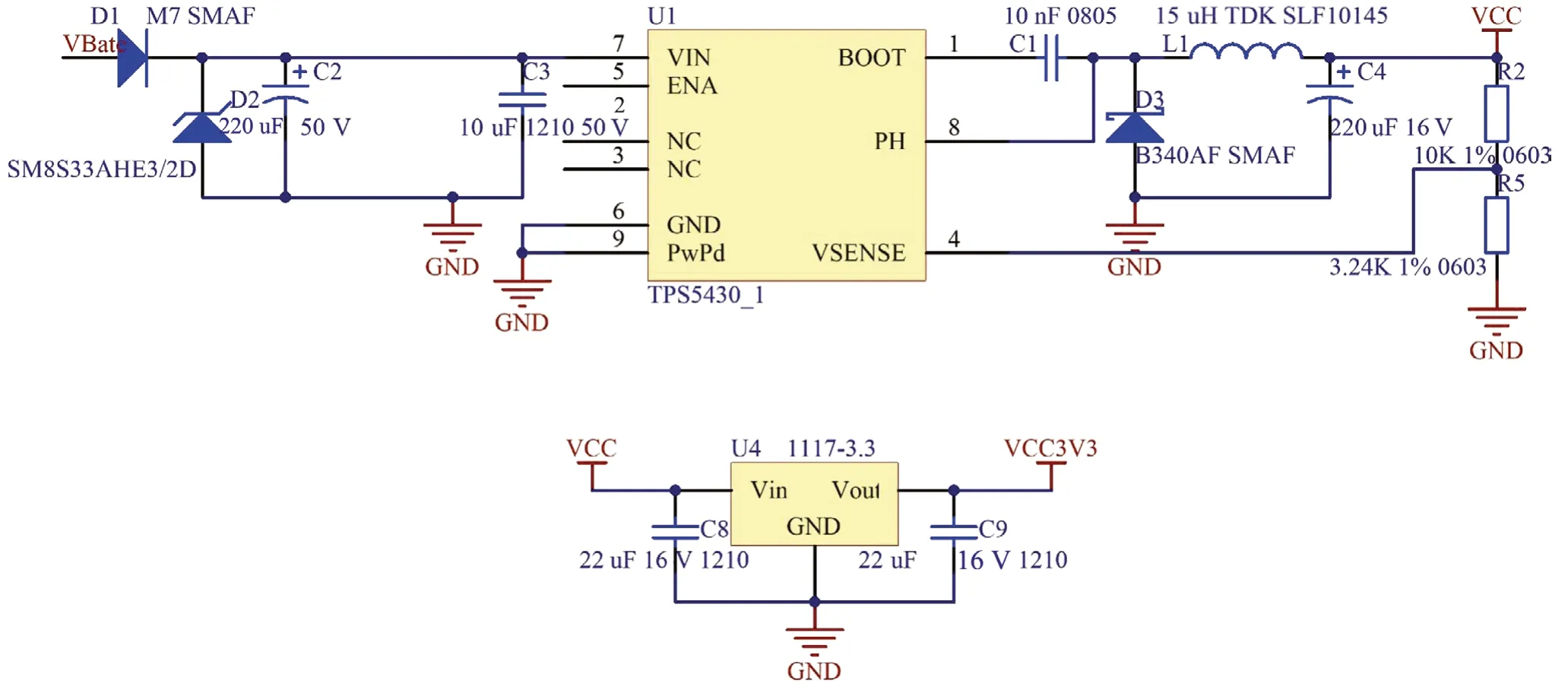
图4 电源供电电路
图中上半部分为车载蓄电池为蓝牙远程调试控制器提供12 V/24 V 的输入电源,通过降压芯片将其转化为5 V 供主控芯片及其他模块使用。该电路选用的降压芯片为TPS5430,该芯片支持的输入电压范围为5.5~36.0 V,能够在-40~125℃的环境温度下稳定运行。此外,芯片内部还具有过压保护、过流限制以及热关断保护功能,以保证电源电路运行过程的安全性和稳定性。
图中下半部分为5 V 转3.3 V 降压电路,负责给蓝牙模块供电。选用的降压芯片是LD1117,该芯片输入端电压最大可达16 V,能够稳定输出3.3 V 电压,输出电压精度可控制在1%范围内,可有效保证对HC-05 模块提供稳定的电源输入。
2.4 CAN通信电路
CAN 收发器在CAN 通信网络中起到信号转换的作用,一方面将来自单片机FlexCAN 模块输出的TTL 信号转化为差分信号传输到CAN 总线上,另一方面将来自CAN 总线上的差分信号转化为FlexCAN模块能够接收的TTL 信号[12]。
本文选用的收发器为Infineon 公司5 V 版本的TLE6250,该芯片的通信波特率可以达到1 Mbps,并且还带有只听模式和低功耗待机模式,可以满足本设计的使用需求。
共模滤波器ACT45B 是为了提高CAN 通信的稳定而选取的元件。可以消除电路中由于线路阻抗不平衡所引起的共模干扰信号。在CAN 高、CAN 低与GND 之间分别接入20 pF 的电容,能够很好的过滤掉CAN 总线上高频信号的干扰,并且还可以防止电磁辐射对电路造成影响。由于阻抗匹配的需要,提高CAN 总线的驱动能力,加上2 个各为60 Ω 的终端电阻。图5 为CAN 通信电路原理图。

图5 CAN 通信电路
3 系统软件设计
软件流程设计首先是系统初始化,然后主机设备(手机APP 或车载蓝牙)开始自动扫描其他蓝牙设备,当扫描到蓝牙远程调试控制器时,发送配对码进行配对,只有配对码一致时才能实现连接。完成配对后,说明主机设备已经与蓝牙远程调试控制器建立连接,下一步需要蓝牙远程调试控制器与悬架ECU 建立连接。
此时,需要APP 向蓝牙远程调试控制器发送连接指令,蓝牙远程调试控制器解析收到的连接指令,将其打包成CAN 报文,通过CAN 总线发送给悬架ECU,悬架ECU 接收CAN 报文后进行相应的连接配置,随后通过CAN 总线返回连接状态,蓝牙远程调试控制器读取CAN 报文信息,并将连接状态通过蓝牙模块返回给APP。若连接失败则需要重新发送连接指令,连接成功后,用户可进行下一步操作,根据需求发送相应的调节悬架的指令,悬架接收到指令后执行相应的动作并且实时返回悬架状态信息,用户可通过悬架状态信息继续调整,直到调到合适位置为止。
当调整结束,不需要进一步调整时,APP 发送断开连接指令,蓝牙远程调试控制器与悬架ECU 断开连接,再发送其他操作指令(连接指令除外)也将视为无效。若断开连接后仍然需要调整悬架,此时只需要重新发送连接指令,然后再发送具体的调整指令即可。本系统的软件流程图如图6 所示。

图6 软件流程图
4 蓝牙远程调试控制器功能测试
为了确保整个系统和模块的正确性与可靠性,对设计的蓝牙远程调试控制器的功能完整性进行测试,搭建了如图7 所示未上车前的功能测试硬件平台,手机APP 通过蓝牙与蓝牙远程调试控制器(位于图7 中央的黑色板)连接,蓝牙远程调试控制器与悬架ECU(位于图7 左侧的绿色板)通过CAN双绞线连接,此外还将CAN 卡(位于图7 上方)接入CAN 总线上。图8 为CAN 卡观察CAN 报文收发界面。
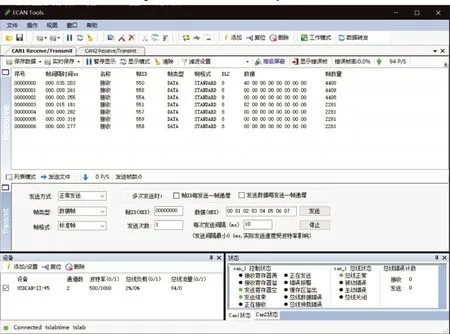
图8 CAN 卡观测界面
首先对硬件电路进行测试,检查各模块是否连接正确,蓝牙远程调试控制器、悬架ECU 供电是否正常。
随后对软件代码进行测试,手机APP 按流程图先与蓝牙远程调试控制器完成配对,然后发送连接指令(如图7 中手机通信框第一行所示,连接指令为55010255AAAA0D0A),此时可在CAN 卡观察蓝牙远程调试控制器与悬架ECU 之间通信的CAN 报文(图8 中帧ID 为550 的报文是蓝牙远程调试控制器发给悬架ECU 的报文,其第一个字节的最高位置1表明发送了建立连接的请求),再通过手机APP 界面返回值观察蓝牙远程调试控制器返回的悬架连接状态(图7 中手机通信框第二行所示为悬架ECU 返回的消息—AA01020200AF 0D0A,其中第7 个数和第8个数组合代表连接状态,01 代表连接失败,02 代表连接成功),成功建立连接后,再逐一发送其他的操作指令,观察CAN 卡上和手机APP 上的信息是否正确,经测试所有指令均能成功执行。
在完成上述平台测试后又进行了上车测试,如图9 所示。上车后又将所有指令再次测试,其中前后桥高度上升、下降指令的测试结果如图10 所示。

图9 实车测试

图10 悬架高度指令测试
由图10 可得,在系统建立连接后,手机APP 通过蓝牙向悬架ECU 分别发送了10 组不同的前桥悬架高度值和后桥悬架高度值,悬架接收指令后进行动作,前后桥实际高度值曲线一直在设定高度值曲线附近,误差在1~3 mm 左右,在悬架控制策略允许的精度范围以内。
经过上述所有测试,所设计的蓝牙远程调试控制器能够达到使用户通过蓝牙远程调节电控悬架的目的。
5 结语
本文介绍了一种基于蓝牙的电控悬架远程调试控制器,包括硬件设计和软件设计。无线模块的应用使得用户可以远程控制电控悬架,按照不同的舒适性对悬架进行调整,可以极大的增加乘坐的舒适性。经过测试,系统工作可靠,功能完善,满足控制需求。
