导弹抗宽范围复杂干扰力矩的控制方法
2022-01-10刘钧圣闫智强卢娟芝
姜 智,刘钧圣,闫智强,卢娟芝
(西安现代控制技术研究所,西安 710065)
0 引言
垂直发射导弹是一种具备360°全向攻击能力的导弹,因此其倾斜通道的稳定控制需要导弹滚转角能从任意角度(最大±180°)快速收敛到0°并一直保持在0°附近。对于采用大展弦比的垂直发射导弹,由于垂直发射的大攻角转弯、弹翼的扭转误差、发动机推力偏斜以及燃气舵等的影响,都会导致倾斜通道存在宽范围的复杂干扰力矩,文中通过对倾斜通道存在的宽范围复杂干扰力矩进行分析,设计了一种自适应限幅与模型参考控制相结合的控制方案,能够实现导弹在存在较大干扰力矩的情况下提供更大的舵偏角以实现导弹的倾斜稳定控制,在干扰力矩较小或不存在的情况下限制导弹滚转角速度,防止导弹因滚转角速度过大带来的失稳风险,最终实现导弹倾斜稳定控制。
1 宽范围复杂干扰力矩分析
在垂直发射导弹的飞行过程中,导弹倾斜通道存在较宽范围的复杂干扰力矩,以某型导弹2 km飞行科目为例,其倾斜通道存在的复杂干扰力矩如图1所示。

图1 倾斜通道干扰力矩
由图1可见,倾斜通道的干扰力矩量级最大在15 N·m左右,最小在1 N·m左右,这种宽范围的复杂干扰力矩为倾斜通道的稳定控制设计带来了较大的难度。
针对干扰力矩的宽范围复杂特性,对产生干扰力矩的来源进行分析,其中不同干扰源所能产生的干扰力矩的量级如表1所示。

表1 干扰力矩量级表 单位:N·m
由表1可知,弹翼扭转偏差是造成宽范围复杂干扰力矩的主要因素,通过气动分析计算得到弹翼扭转偏差1°产生的滚转干扰力矩如表2所示。
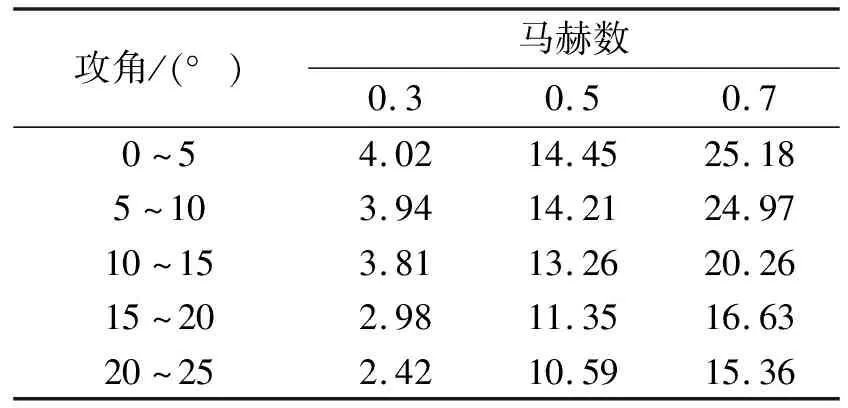
表2 弹翼扭转1°产生干扰力矩数值表 单位:N·m
下面将根据表2给出的干扰力矩进行倾斜通道的抗宽范围复杂干扰力矩的控制方法设计。
2 抗宽范围复杂干扰力矩设计
倾斜通道的控制原理[1-2]如图2所示,倾斜通道采用经典的PID控制方式,其符号含义如表3所示。

图2 倾斜通道控制原理图
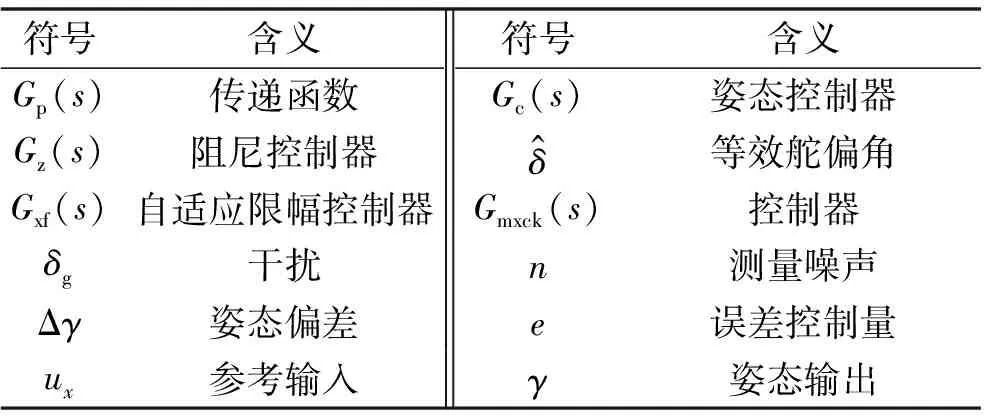
表3 倾斜通道控制符号含义表
倾斜阻尼控制器采用微分控制,其控制参数为Kωx,导弹滚转角速度为ωx,则阻尼回路指令为:
Dωx=Kωx×ωx
(1)
对于倾斜姿态控制器,主要采用比例积分的控制方式,输出倾斜姿态回路指令Dγo。
则导弹的倾斜回路控制指令为:
Dγ=Dωx+Dγo
(2)
抗宽范围复杂干扰力矩控制方法是在以上经典控制方式的基础上,增加两个控制器来实现,即自适应限幅控制器和模型参考控制器。
自适应限幅控制器基本原理是将倾斜通道的滚转角以及滚转角速度作为控制输入,通过一种自适应限幅控制方法,在导弹存在较大干扰力矩时输出大的舵偏角,以实现倾斜通道的稳定控制,在干扰力矩较小或不存在时限制导弹滚转角速度,防止导弹因滚转角速度过大带来的失稳风险,最终实现导弹倾斜稳定控制。
模型参考控制器则是根据导弹的滚转角速度与角加速度来辨识控制对象的实际模型,将其与理论模型的差异折算到控制输入端,并等效为倾斜通道舵偏角来实现对倾斜控制回路的补偿,达到抑制干扰力矩的效果。
3 自适应限幅控制器设计实现
3.1 自适应限幅控制器设计
自适应限幅控制器的设计原理[3]如图3所示。
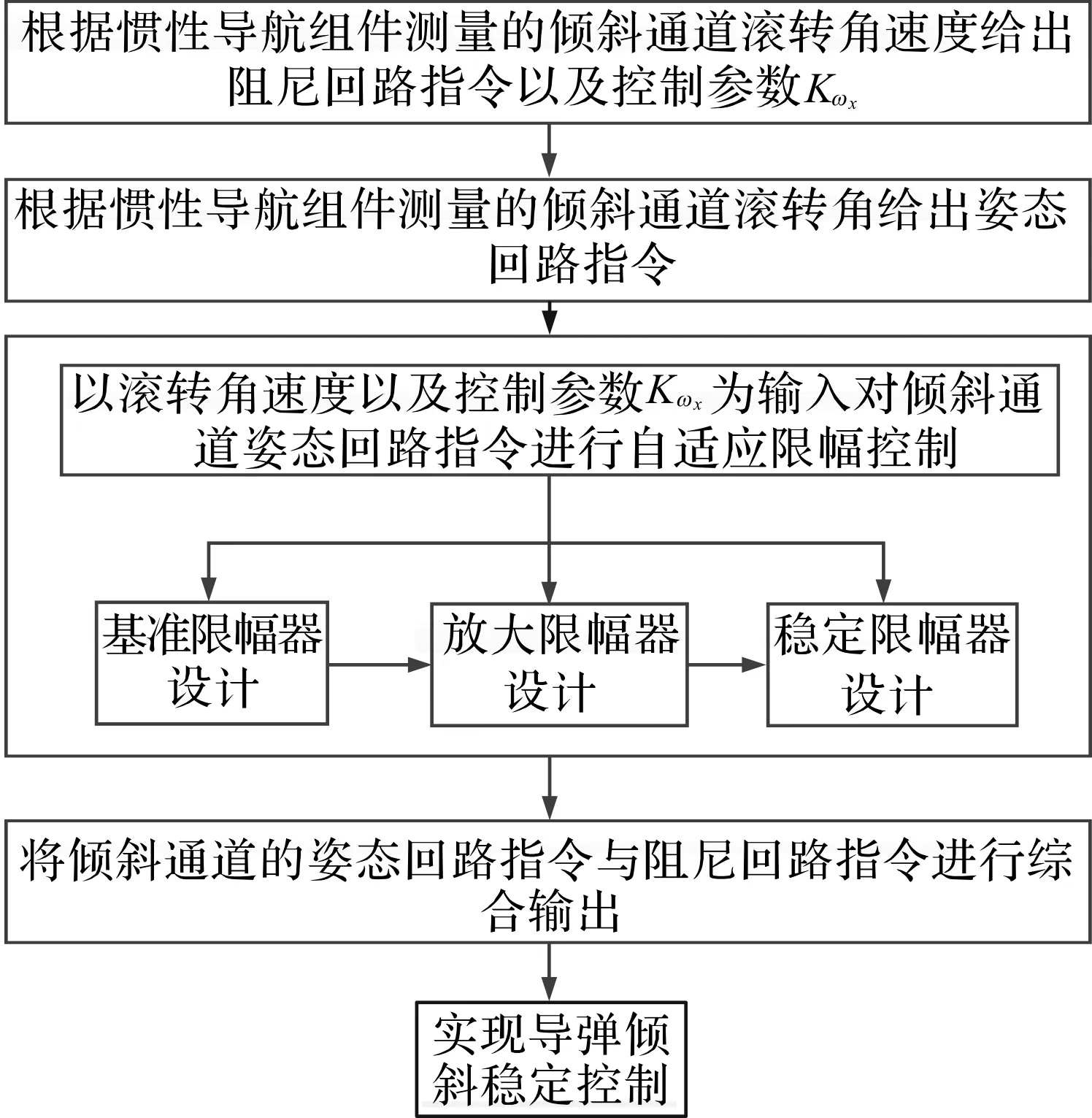
图3 自适应限幅控制器设计原理框图
自适应限幅控制器的主要功能是实现对倾斜姿态回路指令Dγo的自适应限幅,由基准限幅器、放大限幅器与稳定限幅器[4-5]实现。
首先设计基准限幅器,根据垂直发射导弹滚转角速度的实际情况,不考虑滚转干扰力矩,设计滚转角速度工程限幅值Fωx,实现对倾斜姿态回路指令Dγo的限幅:
Dγol=Fωx×|Kωx|
(3)
使倾斜通道在整个控制过程中,滚转角速度的值收敛在Fωx之内。
然后设计放大限幅器,根据大干扰力矩的情况对倾斜姿态回路指令限幅Dγol进一步设计,扩大指令限幅为:
Dγol=Kxf1×Fωx×|Kωx|
(4)
式中Kxf1为大于1的值。
最后设计稳定限幅器,扩展后的倾斜姿态指令限幅虽然能够实现大干扰力矩下的倾斜稳定控制,但是当干扰力矩较小或不存在干扰力矩时大指令会产生大的滚转角速度,带来失稳风险,因此需要对滚转角速度进行抑制,稳定限幅公式为:
Dγol=Kxf1×Kxf2×Fωx×|Kωx|
(5)
其中Kxf2为稳定限幅器控制参数,其取值由滚转角速度判定得到,计算公式如下:
当|ωx(k)|≥Sωx时:
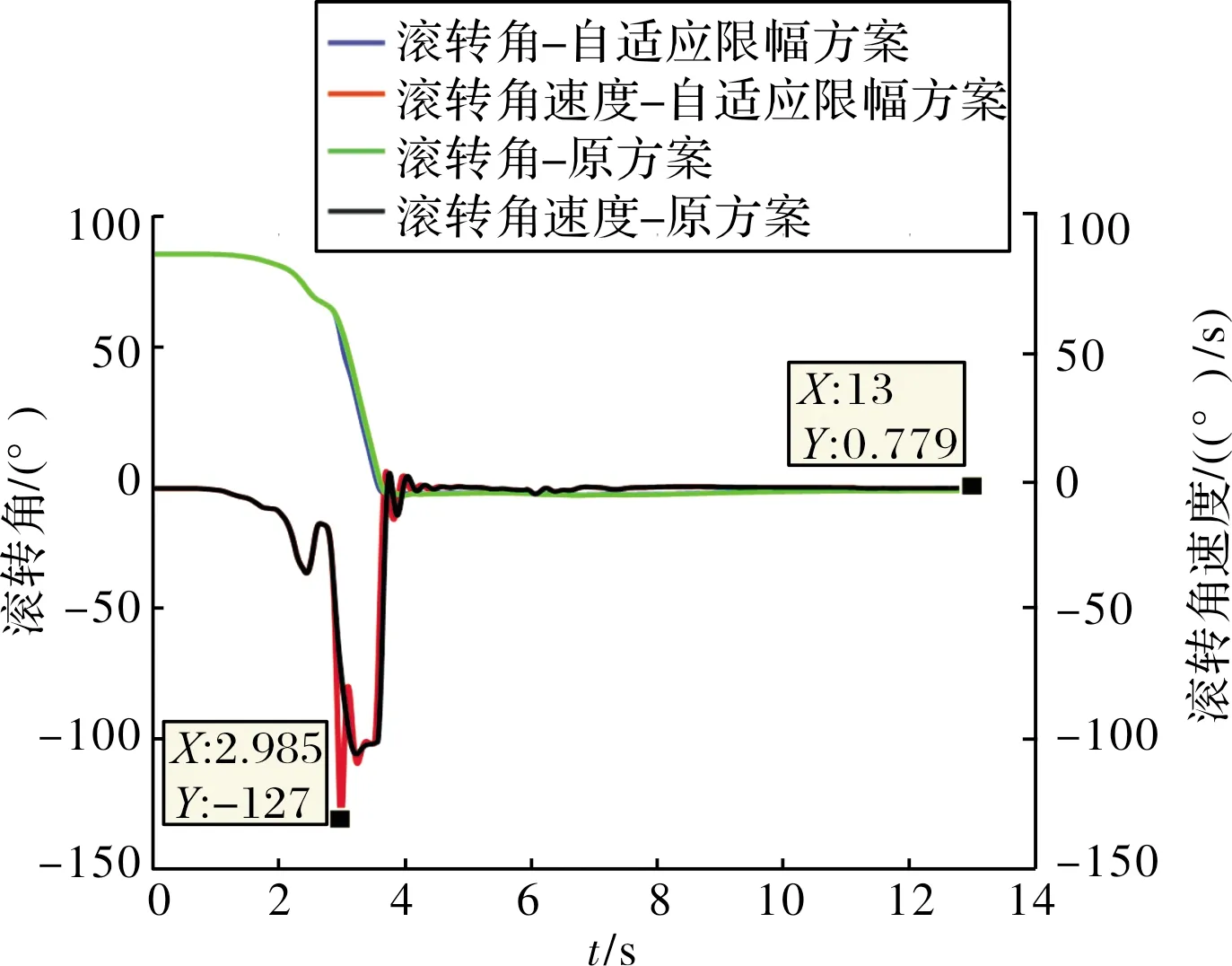
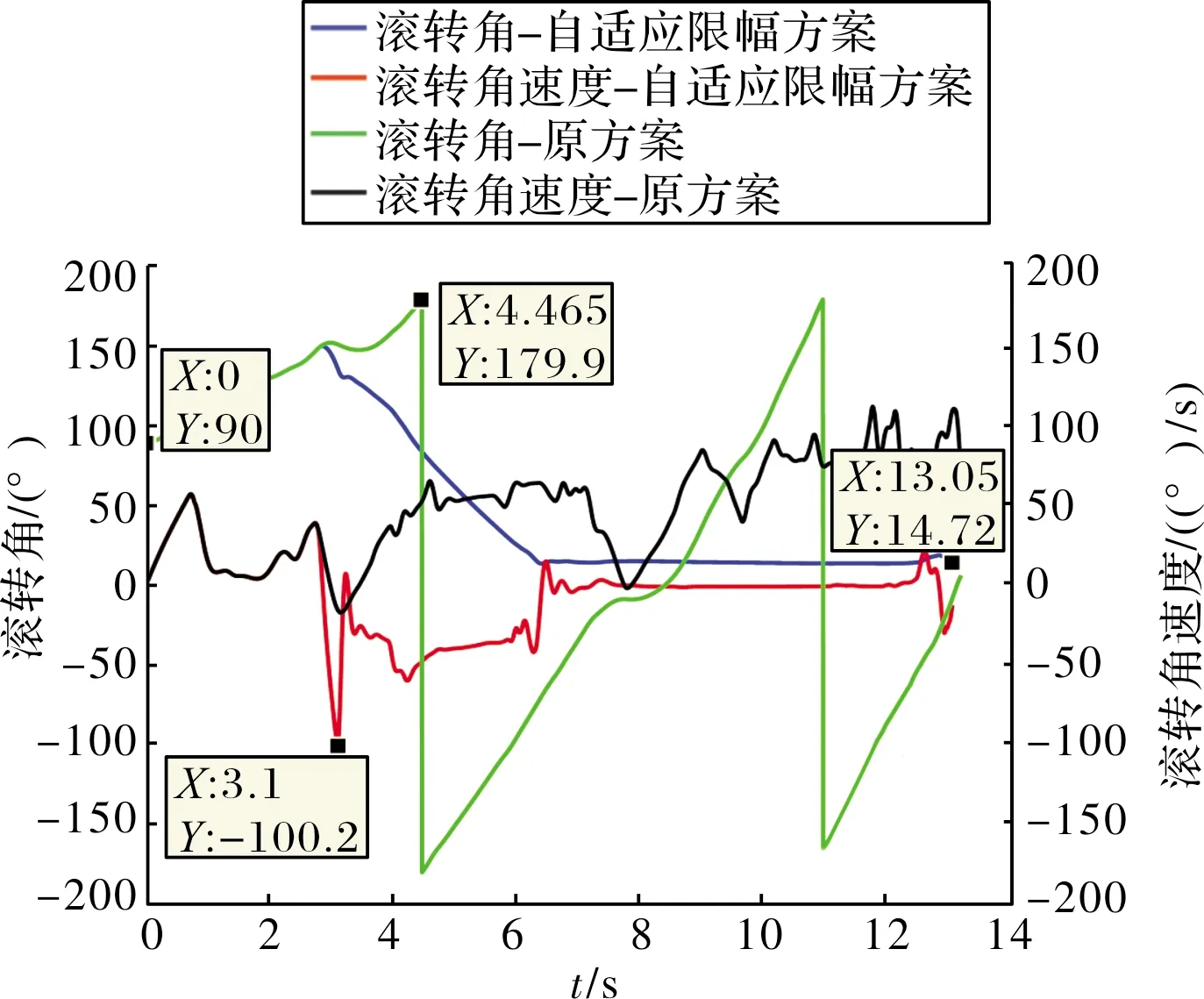
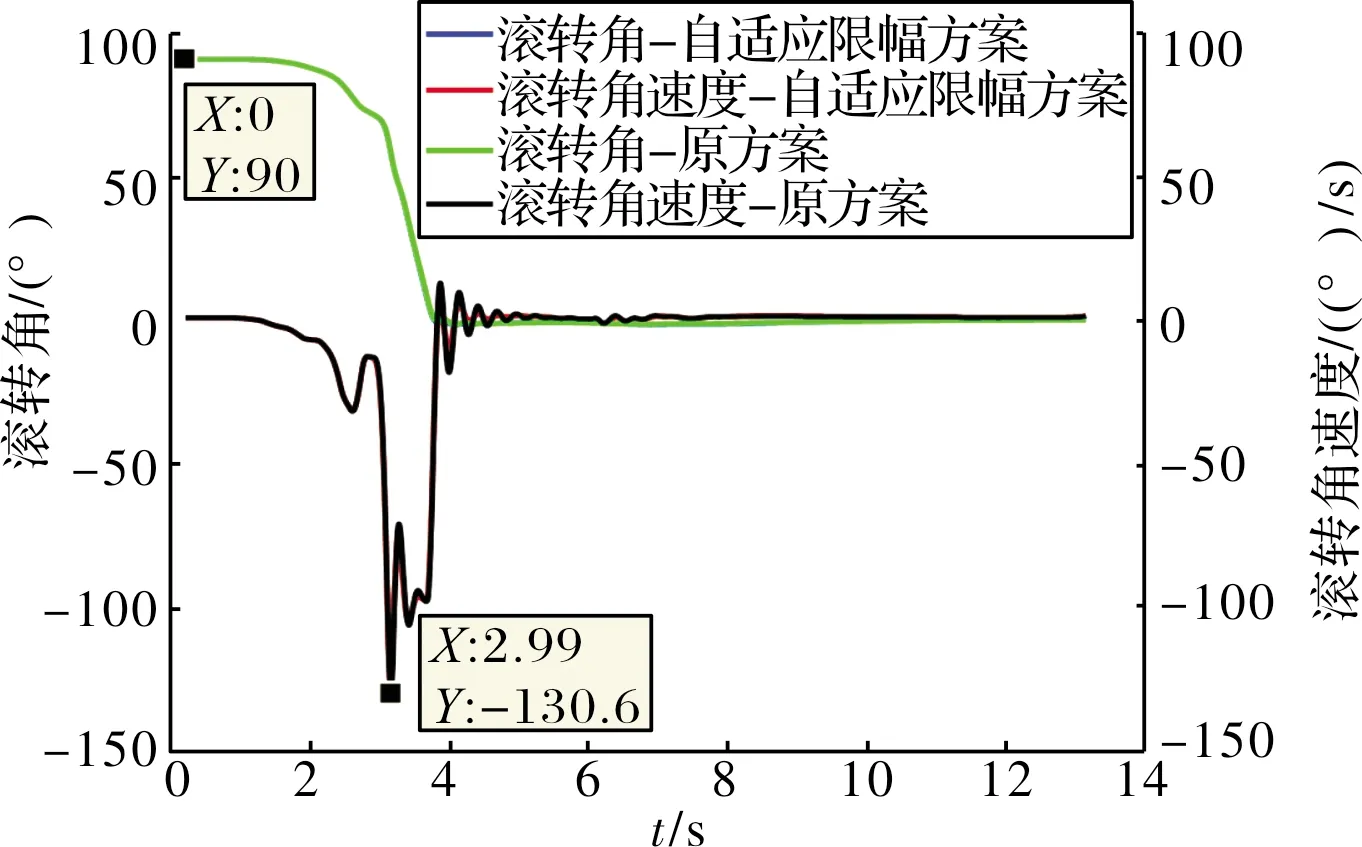
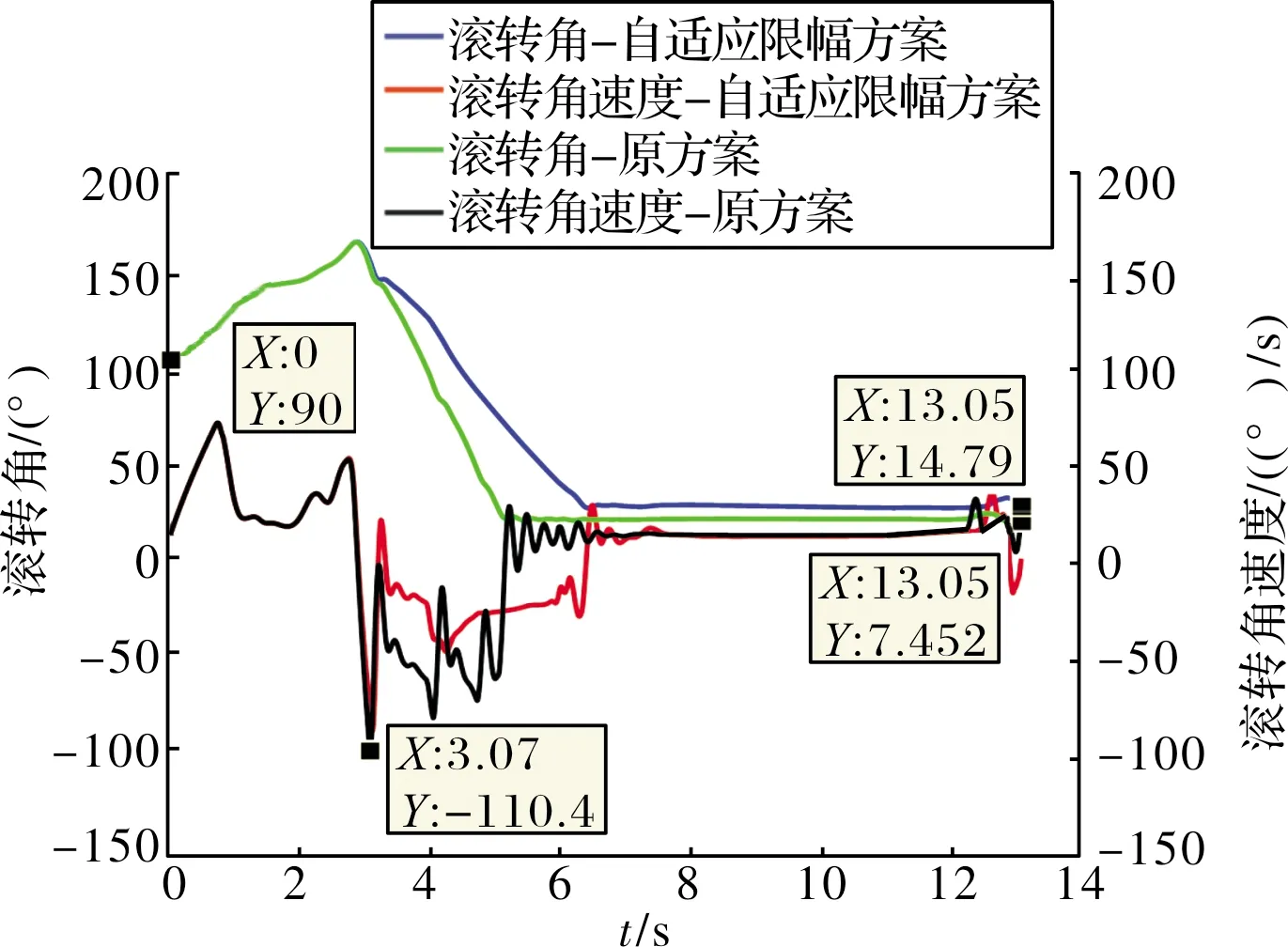
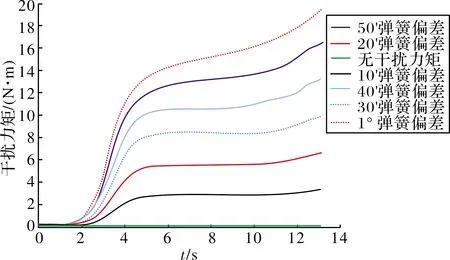
当|ωx(k)| (6) 式中:Kzj=1/Kxf1;Sωx为滚转角速度判定阈值;c1与c2为限幅扩展与回缩步长;k=1,2,3,…。 倾斜姿态回路指令Dγo经自适应限幅控制器Dγol进行限幅,最终输出指令为Dγu,则导弹的倾斜回路控制指令为: Dγ=Dωx+Dγu (7) 原倾斜通道姿态回路指令采取固定角速度限幅,Fωx取值为150°/s,自适应限幅控制器在原限幅基础上进行优化设计,其关键指标取值为:Kxf1=2.0,Sωx=80°/s,c1=0.04,c2=0.008,针对倾斜通道无干扰力矩以及弹翼扭转1°对应的干扰力矩进行仿真对比,滚转角初值取为90°,仿真结果如图4~图6所示。 图4为倾斜通道干扰力矩输入;图5为无干扰力矩时两种方案的滚转角收敛情况与滚转角速度变化对比;图6为以图4干扰力矩为倾斜通道输入干扰力矩时,两种方案的滚转角收敛情况与滚转角速度变化的对比情况。 图4 输入干扰力矩 图5 无干扰力矩时原方案与自适应限幅方案对比 图6 大干扰力矩时原方案与自适应限幅方案对比 通过对比可以发现:在无干扰力矩时,原方案与自适应限幅方案均能够使滚转角快速收敛到0°附近,滚转角速度原方案则更加平稳,但都满足设计要求;但在大干扰力矩情况下,原方案倾斜通道发散,而自适应限幅方案则可以抑制干扰力矩,使滚转角收敛在14°附近,具有很好的抗干扰力矩能力。 模型参考控制器的原理是将倾斜通道的运动学方程求逆,并根据动力学系数以及导弹的滚转角速度和滚转角加速度得到导弹的实际模型,并将其与理论模型的差异折算到控制输入端,等效为倾斜通道舵偏角来实现对倾斜控制回路的补偿,在干扰力矩较小或者不存在时,可以给出很小的通道舵偏角;在干扰力矩较大时,给出较大的通道舵偏角[6]。 根据导弹的动力学、弹体结构等参数,建立导弹的倾斜通道运动学方程[7]: (8) b11和b17可表示为: (9) 根据式(8)可以计算得到控制对象实际模型的等效舵偏角δx: (10) (11) Dqx2(k)=Dqx1(k)-Durx(k-1) (12) Durx(k)=Dγ(k)-Dqx2(k) (13) 则倾斜通道最终的舵指令为: Dγoo=Dγ-Dqx2 (14) 其中:Dγ为自适应限幅控制器的指令输出;Dqx2为模型参考控制器的指令输出。 模型参考控制器作用于自适应限幅控制器的后端,能够在自适应限幅控制器的基础上进一步提升导弹抗宽范围复杂干扰力矩的能力,其仿真结果如图7、图8所示。 从图7和图8的仿真结果可知:在倾斜通道不存在干扰力矩时,模型参考控制器可以精准识别导弹的干扰力矩状态,基本不会补偿倾斜通道舵偏角,其组合控制效果与自适应限幅控制器单独作用相差不大;但在存在大干扰力矩时,模型参考控制器可提供更多的倾斜通道舵偏角,使滚转角收敛的更快,更靠近0°,将滚转角的收敛由14°左右提升到7°左右,实现了更好的控制效果。 图7 无干扰力矩时两种方案对比 图8 大干扰力矩时两种方案对比 对基于自适应限幅和模型参考相结合的复合控制器进行宽范围复杂干扰力矩的仿真,以验证复合控制器抗宽范围复杂干扰的能力。 干扰力矩取无干扰力矩、10′、20′、30′、40′、50′和1°弹翼扭转偏差产生的干扰力矩情况进行仿真。干扰力矩对比如图9所示。 图9 宽范围复杂干扰力矩情况 复合控制器对宽范围复杂干扰力矩的控制效果如图10所示,倾斜通道复合控制器对宽范围复杂干扰力矩具有良好的控制能力。 图10 对宽范围复杂干扰力矩的控制效果图 通过干扰力矩分析和仿真研究可以看出,自适应限幅控制器和模型参考控制器的组合控制能够很好的实现倾斜通道抗宽范围复杂干扰力矩的能力,且工程实现简单,对导弹性能的提升具有重要的实用意义。3.2 自适应限幅控制器仿真验证

4 模型参考控制器的设计实现
4.1 模型参考控制器设计




4.2 模型参考控制器仿真验证
5 抗宽范围复杂干扰仿真验证

6 结论
