面向星间链路的机械加电扫相控阵天线指向权值算法*
2022-01-04吴宗清王东升杨俊武刘军锋黄立娜
吴宗清,王东升,杨俊武,张 伟,刘军锋,黄立娜
(1.中国西安卫星测控中心,西安 710043;2.宇航动力学国家重点实验室,西安 710043;3.太原卫星发射中心,太原 030100)
0 引 言
目前,各导航大国卫星导航系统的正常运行主要依靠地面站来维持,如果地面站出现故障,则卫星系统的性能将下降甚至整个系统陷入瘫痪,将给经济和国防带来无法估量的损失[1]。若采用星间链路(Inter-satellite Link,ISL)技术,卫星导航系统则可以在没有地面站支持的情况下仍正常运行较长时间。因此,星间链路具有广阔的应用前景,发展卫星导航系统的星间链路技术显得尤其重要[2]。
相控阵天线具有波束指向灵活、波束切换速度快,以及可实现多波束目标跟踪等优点,在卫星通信、雷达探测、卫星导航等领域得到了广泛应用。由于相控阵天线受技术条件限制,其电扫描空域覆盖范围小,形成的波束无法同时满足低仰角和高仰角目标的跟踪需求[3-4]。
传统相控阵天线的组阵一般是平面单面相控阵,而此种相控阵天线覆盖全空域有天然的局限性[5-6],单面相控阵受限于俯仰角覆盖范围,一般只能做到平面相控阵天线法向60°范围,很难做到使用单阵面相控阵天线实现对全空域卫星信号的跟踪测量[7]。目前未见通过单阵面相控阵天线与机械装置结合实现天线全空域扫描的设计来实现跟踪“北斗”导航卫星的报道。
相控阵天线通过各收发组件的权值确定天线指向,对于机械转台上放置的相控阵天线需要综合考虑转台的角度来调整收发组件的权值,最终实现相控阵天线的指向。本文设计了一种面向星间链路的机械加电扫相控阵天线装置,实现相控阵天线全空域覆盖,并基于该装置提出了一种面向星间链路机械加电扫相控阵天线的指向权值算法,在机械扫描与电扫描联合的作用下可实现全空域的相控阵天线波束指向。
1 机械+电扫相控阵天线基本结构
本文设计了面向“北斗”三号的机械加电扫相控阵天线装置(图1),能够使相控阵天线实现上、下、左、右方位的俯仰调节,便于相控阵天线实现全空域覆盖。

图1 机械+电扫相控阵天线基本结构示意图
相控阵天线放置在水平机械转台上,在转台中央沿竖直方向设有支柱,天线转台可带动相控阵天线进行俯仰方位转动。
天线转台包括沿水平方向平行设置的上支撑平台和下支撑平台,上支撑平台和下支撑平台之间分别设有电动缸A、立柱及电动缸B,电动缸A的固定端、电动缸B的固定端及立柱的下端分连接在下支撑平台上,电动缸A的伸缩杆端部、电动缸B的伸缩杆端部及立柱的上端分别与上支撑平台的底面铰接,相控阵天线安装在上支撑平台的顶部。通过电动缸A和B,带动伸缩杆的变化实现机械转台带动相控阵天线实现前后左右方位的俯仰调节。
2 机械+电扫相控阵天线指向权值
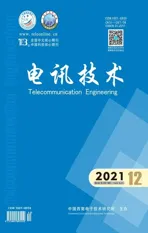
为实现全空域的指向,需要将全空域分解为电扫描覆盖空域与机械扫描覆盖空域两类作用范围:在电扫描覆盖空域,仅依靠相控阵天线电扫描进行波束形成;在机械扫描覆盖空域,通过机械旋转辅助,联合电扫描进行波束形成。在机械扫描与电扫描联合的作用方式下,可实现全空域的相控阵天线波束形成[8]。工作流程如图2所示。
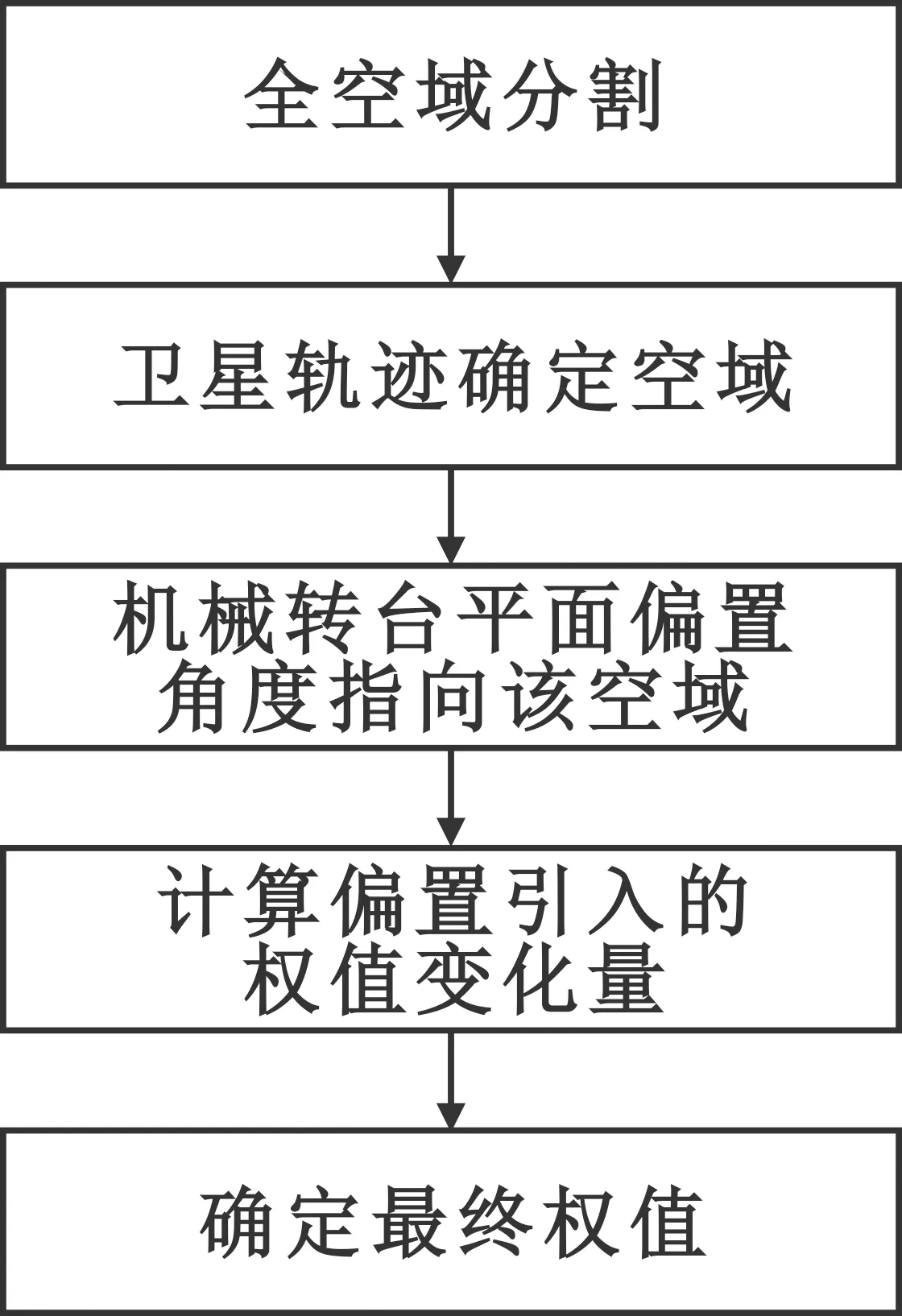
图2 天线指向权值确定流程图
(1)空域分割
若要实现单相控阵天线对全空域(0°~360°)的全覆盖,首先要对全空域进行分割,并针对卫星在空域的运行轨迹实现不同空域间的切换。
将仰角5°以上、方位角360°范围内的空域分割为4个空域,分别为仰角5°以上、方位角-45°~45°范围内的N空域;仰角5°以上、方位角45°~135°范围内的E空域;仰角5°以上、方位角135°~225°范围内的S空域;仰角5°以上、方位角225°~315°范围内的W空域。
(2)依据卫星轨迹确定空域
将卫星当前所在区域与分割后的空域进行比对,确定卫星所在空域方位。
(3)机械转台偏置
控制机械扫描控制杆带动机械转台平面偏置,使电扫相控阵天线指向依据卫星轨迹确定的空域方位。
(4)计算偏置引入的权值变化量
设机械扫描控制杆的偏置量为δ,通过空间坐标变换获得与电扫描空域基准一致的空间坐标体系,并基于该变换后的空间坐标体系,通过相控阵天线波束形成方法生成机械扫描通道权值变化量φ1:
(1)
(2)
式中:(θ0,φ0)为相对于大地坐标系指向角,(θ1,φ1)为分割后空域指向角,δ为机械转台平面的偏置量。
(5)确定最终权值
通过相控阵天线波束形成方法生成电扫描空域相控阵通道权值φ0(n)。
根据公式(3)求电扫描空域相控阵通道权值φ0(n):
φ0(n)=kxncosθcosφ+kynsinθcosφ。
(3)
式中:k为自由空间的波束常数,θ、φ为波束指向的方位角和仰角,xn、yn为第n个通道的坐标。
根据所得的机械扫描通道的权值变化量φ1和电扫描空域相控阵通道权值φ0(n)求最终的相控阵通道权值φ(n):
φ(n)=φ0(n)+φ1。
(4)
3 工程测试结果
依托某“北斗”星间链路地面系统开展了机械加电扫相控阵天线装置指向精度的试验,对指向权值算法的正确性进行了验证。
试验在微波暗室中开展,采用将装置放置专用测试平台上,通过矢量网络分析仪与测试平台精确显示的转动角度综合比对判别指向精度。测试原理如图3所示,测试平台见图4。
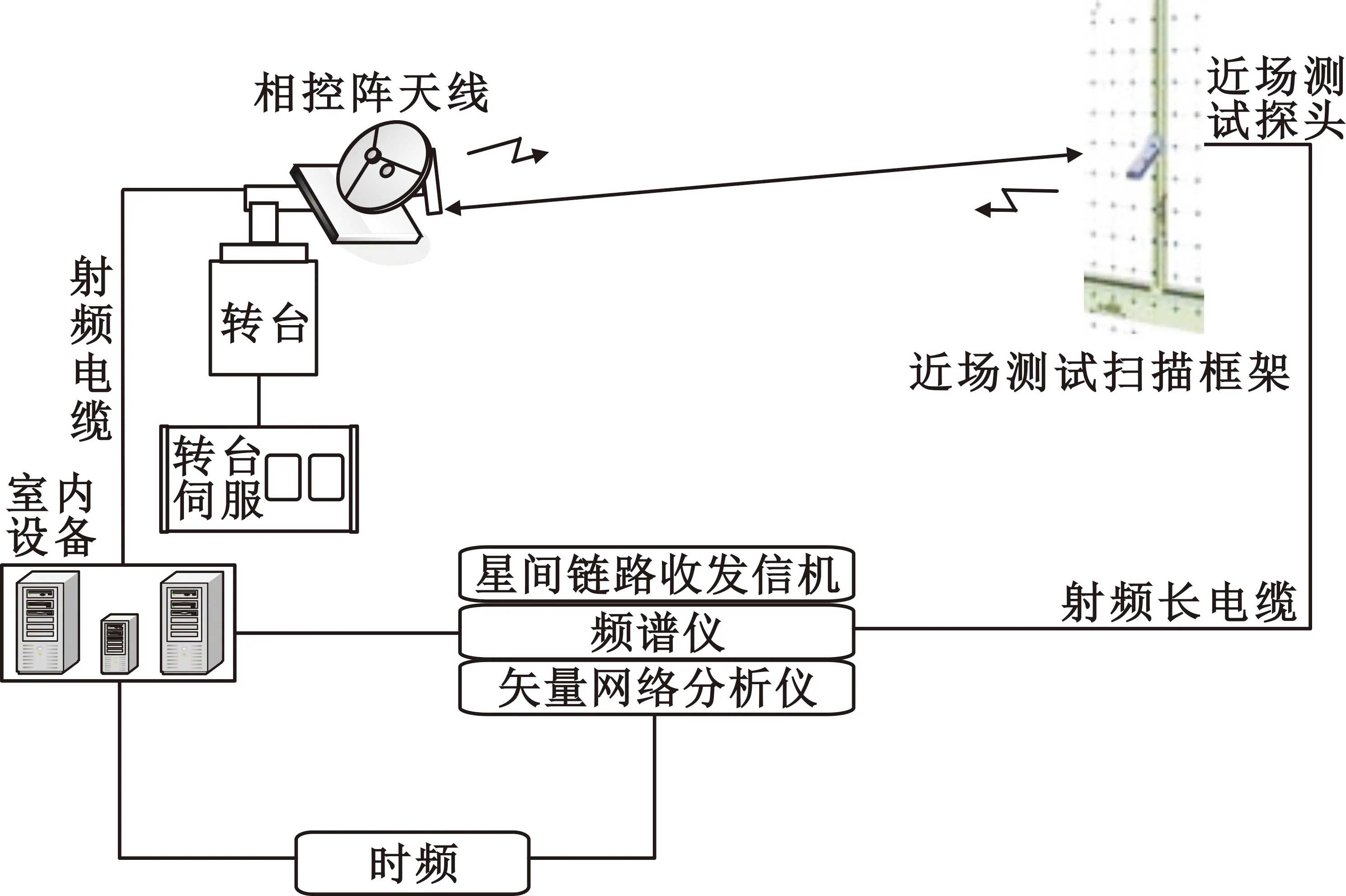
图3 测试原理框图
图4 测试平台现场图
具体操作步骤如下:
(1) 相控阵天线放置在高精度转台上,控制相控阵天线指向阵面法向,此时调整转台角度为0°,使测试探头信号最强。
(2) 控制相控阵天线波束指向(A0,E0)方向,一般固定方位角度,变化俯仰角度。
(3) 反方向转动转台角度实现补偿90°-E0,使此时的测试探头最大,记录下此时转台转动的角度。
(4) 考虑到矢量网络分析仪对于功率的测试误差,最大峰值附近±0.1 dB范围内均认为是波束指向,记录波束指向(A1,E1)。
(6) 将波束指向偏开并重复上述操作,多次测量记录波束指向值,通过式(5)求均方根值。测试记录见表1,均方根为0.14。
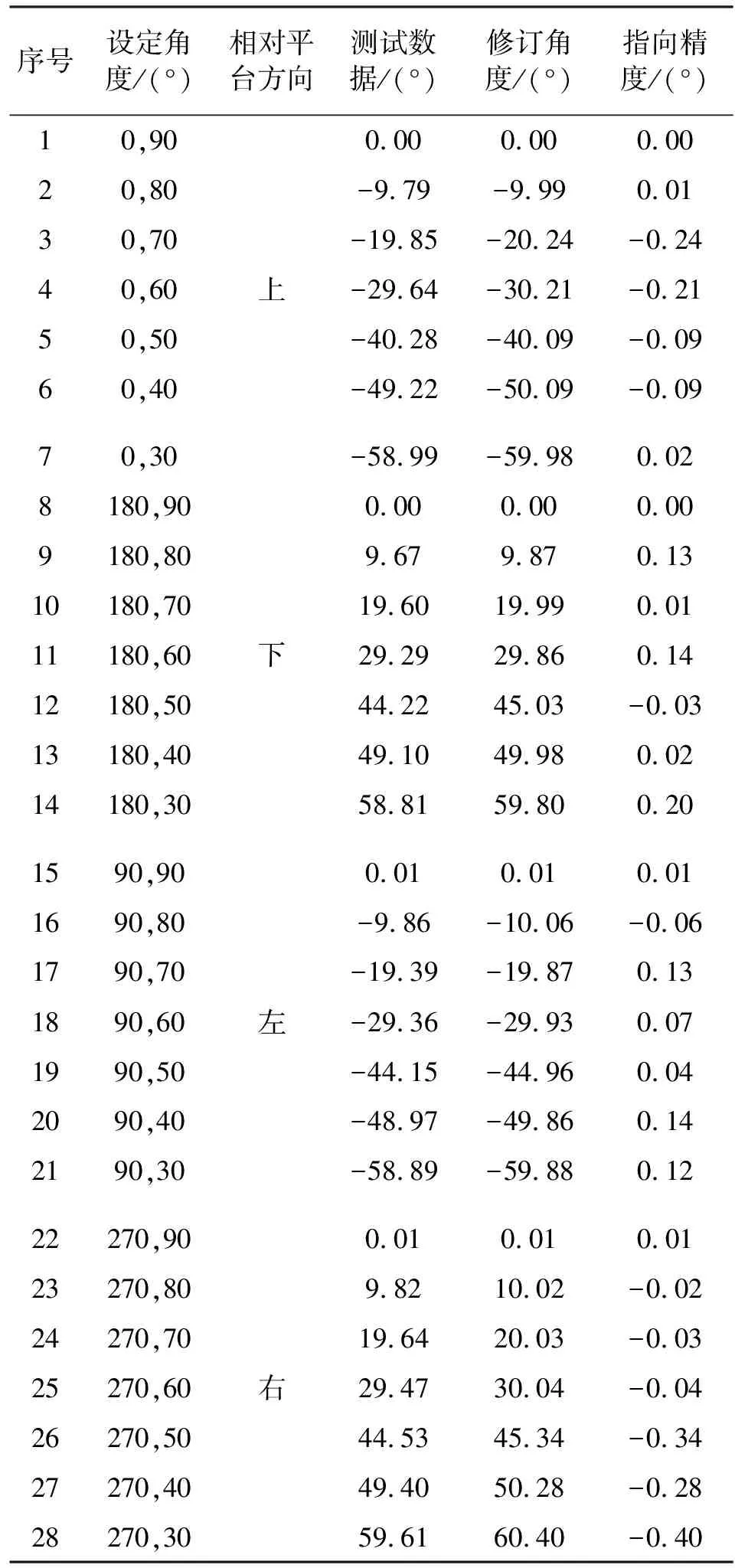
表1 机械+电扫相控阵天线波束指向精度测试记录
(5)
4 结 论
本文设计了面向“北斗”三号的机械加电扫相控阵天线装置,实现了相控阵天线上、下、左、右方位的俯仰调节,便于相控阵天线实现全空域覆盖,并通过建模提出了机械加电扫相控阵天线指向权值算法。通过某“北斗”星间链路地面系统开展了指向精度的试验,试验结果表明该装置运行正常,机械+电扫相控阵权值算法有效可行,具备推广应用的价值。