船载空间目标观测系统的任务规划*
2022-01-04崔嵩
崔 嵩
(中国电子科技集团公司第十四研究所,南京210039)
0 引 言
随着我国航天事业的快速发展,航天测量船测控任务逐渐增加。每一次航天任务都是十分巨大且复杂的工程,仅仅依靠陆基测控站对在轨航天器进行监测已经不能满足全程监控的要求,因此基于海上测量船的海上测控站应运而生。海上测量船具有机动性强、灵活性大、测控范围大等特点,已经被世界上多数航天大国用于航天测控任务[1-2]。但是在使用海上测量船进行测控任务过程中也有一定的约束条件,需要考虑测量工况、船载设备之间的遮蔽、船载设备之间的电磁频谱干扰等因素,因此执行任务前进行完整的规划是十分重要的。一套完整的规划设计可以为船上技术人员提供执行任务辅助便利,对测量船是否能成功执行测控任务具有十分重要的意义。文献[1]提出了一种基于B/S架构航天测量船指挥显示系统的设计方案,重点阐述执行任务时数据实时传输处理软件设计。文献[3]围绕航天测量船海上测控任务的分析与设计方法,详细阐述了海上测控的任务分析和设计的原理。文献[4]对航天测量船工况规划方法进行了研究。文献[5]对测量船电磁兼容性技术进行了分析。
本文提供了一种航天测量船对空间目标观测执行测控任务的规划方法,主要完成对航天测量船的工况规划自动计算,以及考虑遮蔽、电磁频谱、观测要求等多因素下的测量工况、可探测性分析、值班时序、装备计划等规划结果的生成。
本文的创新之处在于提出了一套完整的航天测控任务规划方法,在各个关键技术中结合工程实践阐述了测量工况变航向的具体实施过程方法,提出了一种通过伺服引导规划的装备任务计划编排方法,并在工程应用中取得了良好的效果。
1 总体设计
测量船出海执行航天测控任务首要开展的工作是进行测量工况的规划,保证测量船在执行任务时的船位、船向和船速能够满足船的测量要求[3]。根据测量工况规划出的船位、船向和船速,以及执行任务前的校准航线和执行任务时的测量航线,结合遮蔽分析计算结果、电磁频谱分析,进行装备可探测性分析。根据各装备对目标的可见期生成装备对目标观测计划和各装备的值班时序,并将装备计划按照约定格式下发给各装备执行,同时接收装备计划执行状态,完成计划执行与监视的闭环流程。
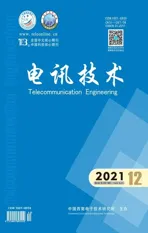
航天测量船对空间目标观测规划的总体设计业务流程如图1所示。

图1 航天测量船对空间目标观测规划的总体设计业务流程
2 关键技术
航天测量船规划技术实现需要涉及到任务管理、方案管理、工况规划、遮蔽分析、电磁频谱分析、观测要求设置、船载装备管理、装备可探测性分析、值班时序生成、装备计划生成等多个技术要点,本文针对其中最为典型的测量工况规划、电磁频谱分析、装备可探测性模型分析、装备任务计划编排等进行研究。
2.1 测量工况规划
测量工况规划可以分为固定航向的和变航向的规划。如图2所示,固定航向的测量工况规划可以按照选船位、定航向、定航速、算航线的流程进行[4],但通过这一系列步骤再次计算装备可探测弧段可能会受遮蔽角影响。根据需要可以选择变航向的测量工况规划,在航行过程中每隔一段时间通过航向改变来避开遮蔽且采用最佳观测俯仰对目标进行观测,进而完成全程无遮蔽观测。
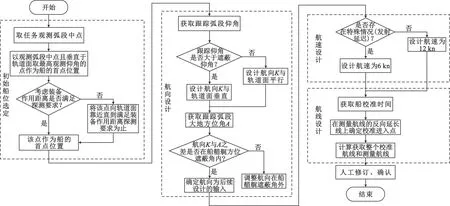
图2 固定航向测量工况规划流程图
采用变航向观测时,考虑有装备部署在船甲板非中轴线位置,如图3装备4在船的右舷,初始船位在星下点飞行右侧(沿着空间目标飞行方向的右侧),初始航向垂直初始船位与发点连线,与射向夹角小于90°,确保航行方向沿着卫星飞行方向;初始船位在卫星飞行左侧(沿着卫星飞行方向的左侧),初始航向垂直初始船位与发点连线,与射向夹角大于90°,确保航行方向与卫星飞行方向相反。变航向观测时的初始船位计算方法与固定航向观测的方法基本一致,取任务弧段中点,以观测弧段中点且垂直于轨道面取最高观测仰角的点作为船的首点位置。在确定了初始船位后,按照平行测量的船向和一般船速,计算任务起止时间段第一次遇到遮蔽的时间点,在这个时间点改变航向,确保航向沿着卫星方向。以此类推,以后每个遇到遮蔽的时间点都如此处理来改变航向。如果任务起止时段内通过计算后没有遮蔽点,为了保持最佳观测仰角,沿初始船位航向向前递进1 min,下一时刻航向垂直下一时刻船位与下一时刻卫星位置连线。依次类推计算,直至结束航向垂直观测弧段末点与结束船位的连线,即每隔1 min改变一下航向。如果装备部署均在测量船甲板中轴线上,则无需考虑测量船部署于卫星的左侧或者右侧。
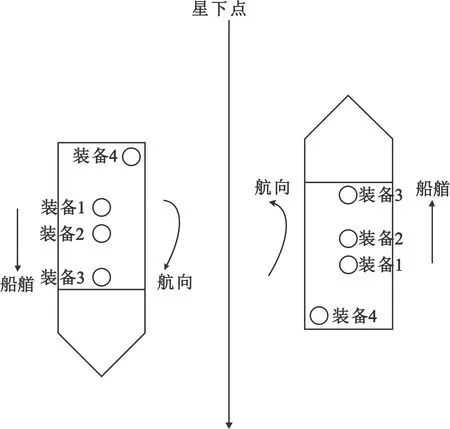
图3 变航向观测航向变化示意图
2.2 电磁频谱分析
电磁兼容问题是在系统设计初期就必须考虑的问题,必须与全船其他系统(如通信系统、导航系统、指挥系统)统筹考虑[5]。测量船上各测量装备的工作频段大都不一致,部分装备之间有频段重叠,主要冲突在于雷达与无源装备之间有频谱干扰。存在频谱干扰时,根据任务数据录取要求同时也为保证装备的安全,必须关闭一个装备来确保装备正常运行。测量船上各装备之间的频谱干扰类型主要包含同频干扰、邻频干扰、倍频干扰,影响装备工作最主要的干扰是同频干扰,因此制定频谱规则在装备之间存在干扰情况时来进行分时分频工作。
首先在规则库中添加频谱规则,规则包含干扰设备、受干扰设备、干扰装备方位角、工作优先级、处理建议。一般为确保装备安全运行,同频干扰下干扰装备方位角度认为0°~360°。若干扰装备与受干扰装备均只有一个工作频段,则根据数据录取要求和装备任务优先级,当两装备有同时可探测弧段的时段将其中一个装备关机,此为分时工作;若干扰装备与受干扰装备有多个工作频段,可适当调整其中一个装备的工作频段,使其避开同频干扰而同时工作,此为分频工作。频谱规则管理应用的基本流程如图4所示。

图4 频谱规则管理应用流程图
2.3 装备可探测性模型分析
为了获取目标的多种数据信息,一般测量船上会装载多种装备,包括雷达、无源系统、光电经纬仪等。多种装备对目标观测相互配合,具有较好的观测效果。一般的雷达的探测精度高,捕获能力强,可全天候值班[6];无源系统因其不向外发射电磁波所以隐蔽性相对好[7];光电设备则对高轨卫星探测具有较好的探测精度。因此,在进行可探测性分析计算时,需要考虑以上多种装备的探测模型[8]。
雷达的一般方程如下所示[9]:
(1)

一般地,雷达的标称威力是已知的。记雷达散射截面(Radar Cross Section,RCS)为1 m2的雷达威力为R,根据目标RCS来折算雷达的威力。由式(1)的雷达方程可知,雷达的威力与目标RCS之间的关系如下:
(2)
式中:R′为折算后的雷达作用距离,σ′为目标的RCS,R为RCS为1 m2的雷达威力。
无源系统利用目标辐射信号对其进行检测和定位,常用的信号包括通信信号、数传信号、遥测信号等。针对每种不同的信号,主要是目标的信号功率对作用距离的影响,考虑到系统损耗,无源系统的最大作用距离可用如下公式表示[10]:
(3)
式中:Pt为辐射源的信号功率,Gt为辐射源发射天线的增益,Gr为无源探测接收机天线的增益,γr为接收机天线极化与辐射源信号极化失配损失(γr<1),k为玻尔兹曼常数,T0为标准噪声温度,Fn为接收机噪声系数,Bn为接收机噪声带宽,(S/N)min为最小可检测信噪比,L为总的系统损耗。
一般在工程应用中,难以全面获取有关目标的情报信息,无源系统对未知目标探测时常利用典型的威力值来进行可探测性弧段估算。
光电经纬仪对于目标的可见性分析主要受到天光、地影等的约束条件的限制,即必须满足以下两个条件:一是测站处于黑夜;二是空间目标处于被太阳直接照射。
天光地影的区间求解方法描述如下[11]:
(1)地影区间
所谓地影区间,就是每圈的出地影时刻到进地影时刻的时间段,如图5所示。

图5 地影区间
设某圈的过赤道时刻为TN(I),由轨道根数和日月坐标α⊙、δ⊙即可计算进出地影点的UJ、UC步骤如下:
Step1 求太阳在轨道面上的投影u⊙、ψ⊙。
u⊙、ψ⊙可由图5中的球面三角形中求出:在球面三角形中,已知两边夹一角,即i,90°-δ⊙,90°+α⊙-Ω已知,就可求得90°-u⊙-ψ⊙,90°-u⊙,90°-ψ⊙。于是,太阳在轨道面上的投影u⊙、ψ⊙就可求出。
Step2 求远日点u。
远日点的定义为轨道上地影最深处的点,即rsinψ最大的点。

(4)
式中:r为人造卫星的地心距,ψ为人造卫星和太阳在地心处的交角。
根据
cosψ=cosψ⊙cos(u-u⊙) ,
(5)
(6)
得
(7)
(8)
于是,

(9)
令
u=u⊙+π+ε,
(10)
则

(11)
根据式(10)和(11)即可迭代得到远日点的u。
Step3 求进出地影点的UJ、UC。
在[u,u-π]之间求进地影点UJ,在[u,u+π]之间求出地影点UC,求地影点时采用二分法,不在地影中的条件为
(12)
r地影=1.003 741 37(6 402 km) 。
(13)
则该圈的无地影区间EST(1,I)、EST(2,I) 分别为
EST(1,I)=TN(I)+λ(UC)/(dλ/dt),
(14)
EST(2,I)=TN(I)+λ(UJ)/(dλ/dt) 。
(15)
式中:λ(U)为U对应的λ,dλ/dt为λ的变率。
对于一步内的所有进出地影时刻,在程序实现时必须保证相邻两圈的时间间隔为一圈。要注意UC向南向北过赤道的情况,对此要作特殊处理。这样就可得到一步内的地影区间为
[EST(1,I),EST(2,I)],I=1,2,…,MAXN。
(16)
(2)天光区间
如图6所示,天光区间即为测站预报当天的昏影终时刻t1到下一天的晨光始时刻t2之间的时间段[t1,t2]。
图6 天光图
设当天0h的太阳坐标为α⊙、δ⊙,测站的经纬度为λ、φ,当天0h的恒星时为S,计算天光时要求的太阳天顶距为Z⊙,则太阳天顶距为Z⊙时的时角τ为
(17)
于是,昏影终时刻为t1=τ+α⊙-λ-S,晨光始时刻为t2=t1+1.0+2τ。
注意这些量要化为以天为单位,与上面LT区间一样每天有一个区间。这样就可得到一步内的天光区间为
[SST(1,I),SST(2,I)],I=-1,0,1,2,…,H。
(18)
2.4 装备任务计划编排
根据任务场景、任务数据录取要求,对各个传感器进行任务编排。由于单脉冲、无源监视系统、光电经纬仪的跟踪能力有限,可以认为在同一时刻只能观测一个空间目标,而相控阵雷达因其波束可以任意指向,在微秒量级上进行捷变,因而具备多功能、多目标和高度自适应的能力[12-13]。因此,对于相控阵雷达的任务编排是测量船执行观测任务之前规划的关键。
由于在航天测量船上的相控阵雷达的阵面是可转动的,因此在任务编排过程中考虑如何进行伺服规划引导是任务计划编排要考虑的重要问题。本文提出一种方法,在雷达对空间目标任务编排过程中同时给出伺服引导建议,下面介绍主要过程。
(1)确定观测条件,考虑任务要求,因素可定为最短观测时长、最大转向时长等。相控阵雷达的最短观测时长可定为3 min。低于3 min的可探测弧段可以剔除,不作为考虑范围,即以下步骤中提到的可探测弧段均为观测时长满足观测条件要求、大于最短观测时长的可探测弧段。
(2)在不考虑方位和俯仰限制(即不考虑电扫范围)的情况下,计算出装备对多个空间目标的可探测性弧段。
(3)对(2)中得出的可探测弧段按照各个探测开始时间从小到大排序,对于各个时间上没有间断的时间段计为ts~te,这种时间段个数为N个,因此分析的时间段可表示为ts1~te1、ts2~te2…tsN~teN。
(4)在某个时间片内,雷达的伺服指向在方位和俯仰上可以一定的步长进行滑动计算在某伺服指向上的可探测目标个数为最多。
(5)得出在某时间片装备观测到目标数目最多的伺服指向,同时计算在此指向下装备对多空间目标的观测起止时间和位置,输出多目标任务编排方案。
该方法的任务编排流程如图7所示。

图7 相控阵雷达任务编排流程图
以上方法可总结为基于多滑窗比较方法,大大提高了计算效率,避免了逐个遍历比较耗费时长较长的问题。滑窗步长选择也要同时兼顾计算全面性。该方法认为多目标的优先级一致,对于多目标优先级的任务来说也可用基于目标优先级的贪婪算法进行任务编排,本文不再赘述。
3 界面设计
为了满足功能要求和操作便捷,良好的界面设计、交互设计能提升软件使用效率和使用效果[14-15]。本文为实现测量船对空间目标规划功能,设计了一种界面展示方式,如图8~11所示。

图8 规划主界面
图8为航天测量船对空间目标观测规划主界面,界面布局左侧主要为输入元素,右侧为输出内容。在界面中添加规划的空间目标,设置任务观测时段,添加观测装备,考虑船上装备之间的遮蔽分析和电磁频谱规则,进行规划生成操作,最终依次给出测量工况规划结果、目标观测效果、装备值班时序和装备对目标的可探测计划。图9为测量工况规划出的船位结果的二、三维地图显示。图10为电磁频谱规则应用界面,界面中提供基础规则查询、添加至方案,规则中优选装备等功能,同时提供基础规则新增和删除的规则管理功能。图11为各个装备对多空间目标的任务编排结果,上表下图,编排结果包含装备名称、目标、伺服指向、观测的起止时间和起止位置。

图9 测量工况规划船位地图二三维显示

图10 电磁频谱规则应用界面

图11 任务计划编排结果展示界面
4 结 论
本文对航天测量船空间目标观测规划的总体业务流程、规划方法进行了分析与设计,对其所涉及到的典型关键技术进行了研究,并给出了关键技术的实现流程与方法,对航天测量船多空间目标观测规划技术具有重要的参考意义。本文所设计的规划方法已在工程中得到了实际应用,运行状态良好。