一种火星多任务探测器系统概念设计
2021-12-31刘华伟田百义呼延奇李伟杰
刘华伟,田百义,呼延奇,李伟杰
(北京空间飞行器总体设计部,北京 100094)
1 引 言
国外火星探测已经历半个多世纪的发展[1],开展火星探测和研究,对于认识人类居住的地球环境,特别是认识地球的长期演化过程,具有非常重要的科学意义。根据火星及其他深空探测任务经验,人类开展火星探测的主要科学目标包括[2-6]:寻找生命存在痕迹;了解火星上水的存在及消失的过程;了解火星大气和气候的演化过程;了解火星物理场和内部结构的演变;掌握火星的地貌和地质特征。
国外已成功开展的火星环绕探测任务包括早期的水手3 号、水手4 号、水手9 号、火星全球勘探者、火星探路者、火星奥德赛轨道器、欧洲“火星快车”、火星勘测轨道器,以及后来的火星大气与挥发物演化轨道器等。上述任务的顺利实施为火星着陆探测提供了必要的火星大气、地形地貌等空间环境数据支撑,如典型火星着陆探测任务海盗号、勇气号、机遇号、凤凰号、好奇号、洞察号等。2021年5月15日,天问一号“祝融号”火星车成功着陆于火星乌托邦平原南部预选着陆区。中国首次火星探测任务着陆火星取得圆满成功,成为继美国后,第二个成功着陆在火星上的国家。
目前,火星探测任务普遍相对单一,主要针对轨道空间及着陆巡视进行既定的、相对有限的探测任务进行开展。随着在轨组装与服务技术发展,未来通过大型探测器系统对火星及其他深空领域进行探测将逐渐成为可能。例如,美国已提出深空关口站、大型火星探测转移飞行器、布置于SEL2 的超大型空间望远镜系统构建及其在轨服务任务设想等。统计和研究发现[7],国内外关于在轨组装、在轨服务的系统级航天器任务,包括已成功实施的和其他公开报道的,已经超过130 个。且随着空间机器人和航天器工程技术的飞速发展,这个领域的发展将日趋受到关注。
在地火转移策略研究方面,从地球到火星的飞行方式包括脉冲转移和小推力转移等,其中最常采用的方式是脉冲转移[8],并在已经实施的火星探测任务中广泛采用。近年来,随着以电推进、太阳帆等为代表的小推力推进系统的发展和应用,小推力推进以其高比冲、低燃耗的优势,逐渐成为深空探测任务的首选推进方式[9]。
在前期研究的基础上[10],本文进一步论证火星探测的必要性,分析研究火星探测的任务序列,确定火星多任务探测器的功能体系,提出火星多任务探测器概念设计和任务实施设想,并分析其关键技术体系,为后续相关研究做好支撑,也为我国火星及深空探测器任务规划提供参考。
2 多任务探测设想
通过对国外已成功实施的火星探测任务的调研分析(如表1 所示)可以看出,探测任务主要包括火星表面形貌、大气成分、射线、离子体、磁场等火星空间环境探测。探测器的轨道设计主要包括:飞越探测、环火探测,以及正圆形约400 km高、大椭圆轨道近火500 km/远火80000 km 等,这些轨道都是针对特定的火星空间环境探测需求进行设计的。同时,由于火星探测的长距离通信难题,使得有些火星探测器还兼顾与地球数据中继的任务,比如火星奥德赛探测器。此外,火星空间环境探测的有效载荷主要包括以下几类[11-12]。
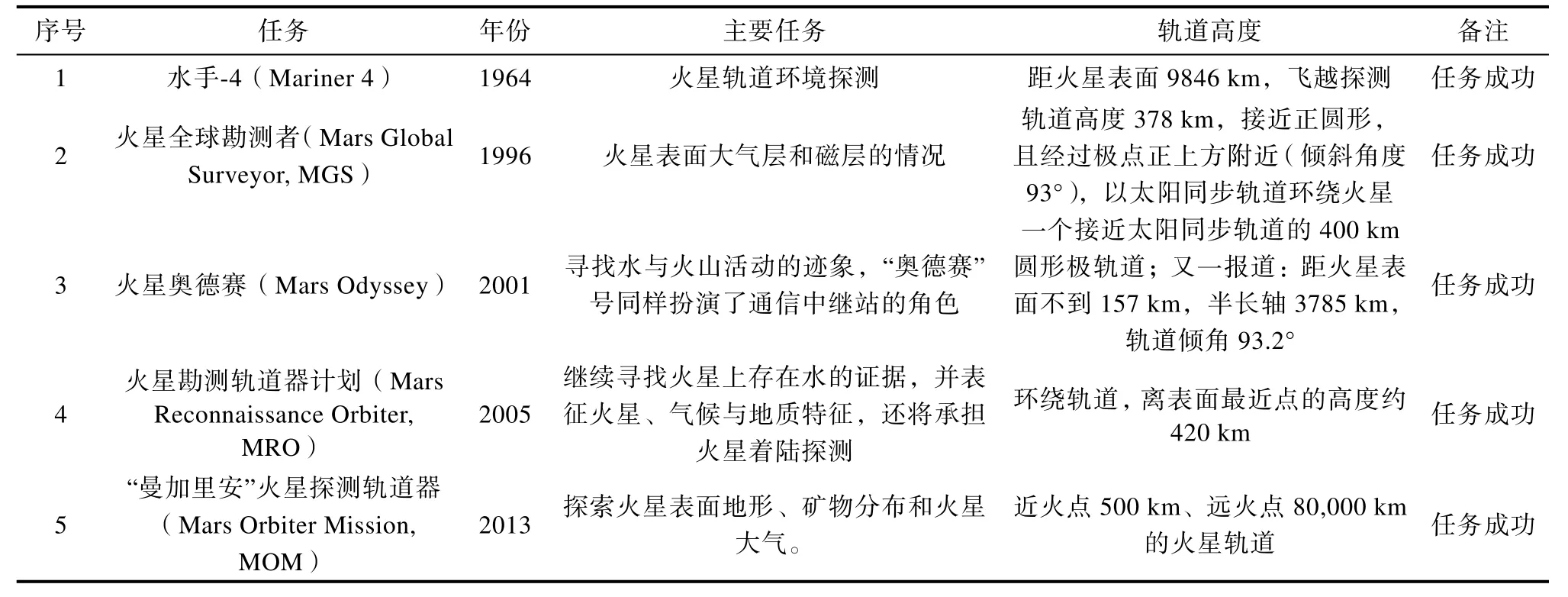
表1 国外已成功实施的火星空间环境典型探测任务Table 1 Typical missions to the Martian space environment successfully carried out abroad
(1)成像探测:火星彩色相机、雷达、高分辨率成像仪、热红外成像光谱仪、小型勘测成像光谱仪等;
(2)大气探测:气候探测仪、火星外层大气中性成分分析仪、火星甲烷探测器、离子体探测包、莱曼-阿尔法光度计、电子反射计等;
(3)射线探测:射线谱仪、发射频谱仪、辐射测试仪、紫外稳定振荡器、高能中子探测器等;
(4)磁场探测:磁强计等;
(5)高度探测:激光高度计等。
受限于运载,火星探测器一般仅配置有限几种有效载荷,对火星大气或星表进行探测,难以实现火星的全面探测。本文在在轨组装的基础上,开展多任务探测系统设计,提高火星探测任务的系统效能。在陆空协同情况下[13],考虑火星环绕、着陆、采样等任务过程,火星多任务探测器系统的任务序列设想主要包括:
(1)兼顾地火数据中继:通过中继星多星系统配置,建立火星与地球间的中继数据传输链路,为安全高效地实施火星多任务探测提供全天时数据链路保障;
(2)火星表面详查:通过配置相应数量的遥感探测器,实现火星表面的全球覆盖,绘制详实的火星表面形貌图,也可为后续火星表面着陆探测提供数据支撑;
(3)火星空间环境详查:主要是火星大气环境的详查,通过配置相应探测器,获取不同高度火星大气环境的立体数据,建立丰富的火星大气环境数据库,为更安全更合理的火星EDL(进入、减速和着陆)探测任务规划与实施奠定重要基础;
(4)火星表面探测:通过着陆巡视器着陆至火星表面并进行巡视探测,获取火星表面的探测数据,可按任务配置对火星表面样品及一定深度的土壤、岩石等进行特性研究。
3 探测器组成与功能定义
随着智能自主在轨组装技术的发展[14],模块化航天器系统设计水平逐渐提高[15]。根据上述火星探测任务分析研究,结合前期基于模块化在轨组装与维护技术所构建的火星多任务探测器系统设想[10],火星多任务探测器可以配置多种类型, 分批发射并在近地轨道在轨组装[16]。整个探测器系统除包含上述着陆巡视探测器、全球遥感探测器、大气详查探测器、数据中继星之外,还包括母体飞行器以及轨道转移飞行器,初步构型设想如图1 所示。轨道转移飞行器位于组合体最下端,为不同阶段组合体及各类探测器的轨道转移提供动力,母体飞行器为组合体的组装与转移等提供基本基体,其上配置大型柔性太阳翼、可展开辐射器、可移动操作机器人等模块,解决大型系统供电、热控和组装操作等问题。母体飞行器上端配置扩展桁架,扩展桁架侧面可安装多类探测器、敏感器等,如全球遥感探测器、大气详查探测器、数据中继星等,组合体最上端安装着陆巡视器,可在火星表面着陆执行星表巡视探测任务。各类探测器的具体功能详见表2。通过各类飞行器任务实施及按需接受服务,实现系统的火星探测任务。
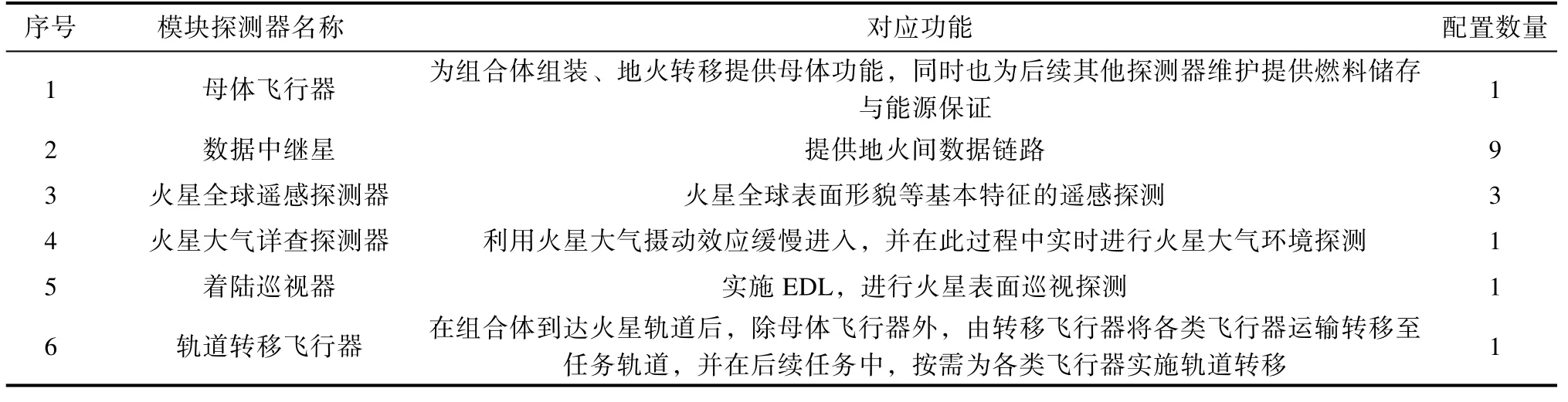
表2 火星多任务探测器系统组成、功能定义及配置数量Table 2 System composition, function definition and configurations of Mars multi-mission
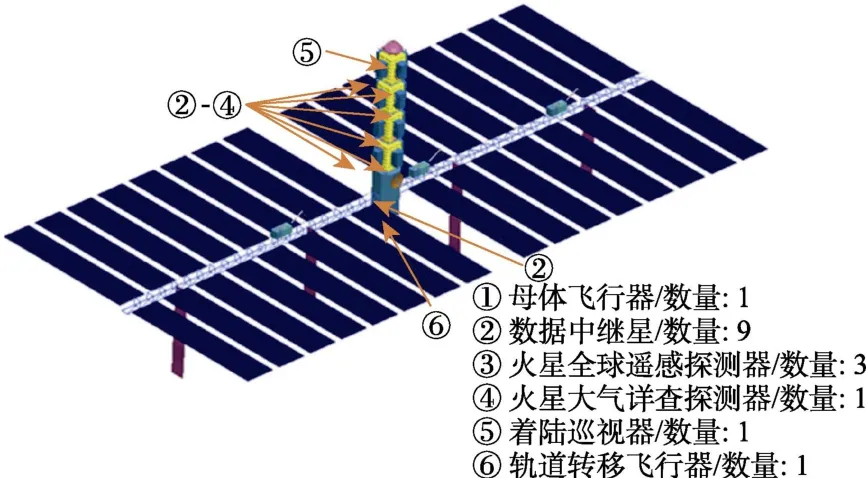
图1 火星多任务探测器(组合体)基本构型设想及其组成Fig.1 Basic configuration and composition of the Mars multi-mission probe (combination)
4 探测器飞行任务轨道分析
4.1 地火转移策略
火星多任务探测器系统有别于一般的火星探测任务,该系统由母体飞行器、轨道运输飞行器和多个不同的任务探测器组合而成,系统总质量将达数十吨的规模。文献[10]对该系统用于地火转移的推进提出了初步的需求。本文主要瞄向未来火星在轨服务为目标,根据相关研究报道[17-20],为实现长周期、火星多任务探测,采用小推力转移策略是本项工作的优选方案,本文重点开展小推力飞行轨道的优化设计。以卫星总质量10 t 为例,地火转移阶段分别采用100 kW 和200 kW 推力器,则探测器由地球飞往火星的星际转移段燃料和时间需求见表3。探测器地火转移阶段的燃料消耗随推力器功率的增大而减小;发动机比冲越大,对应所需的燃料也越少。例如,200 kW 的2 N 推力器完成星际转移所需燃料最少,约0.62 t,探测器到达火星时的剩余质量为9.38 t,整个星际飞行时间约852 天。地火转移轨道示意图如图2 所示。
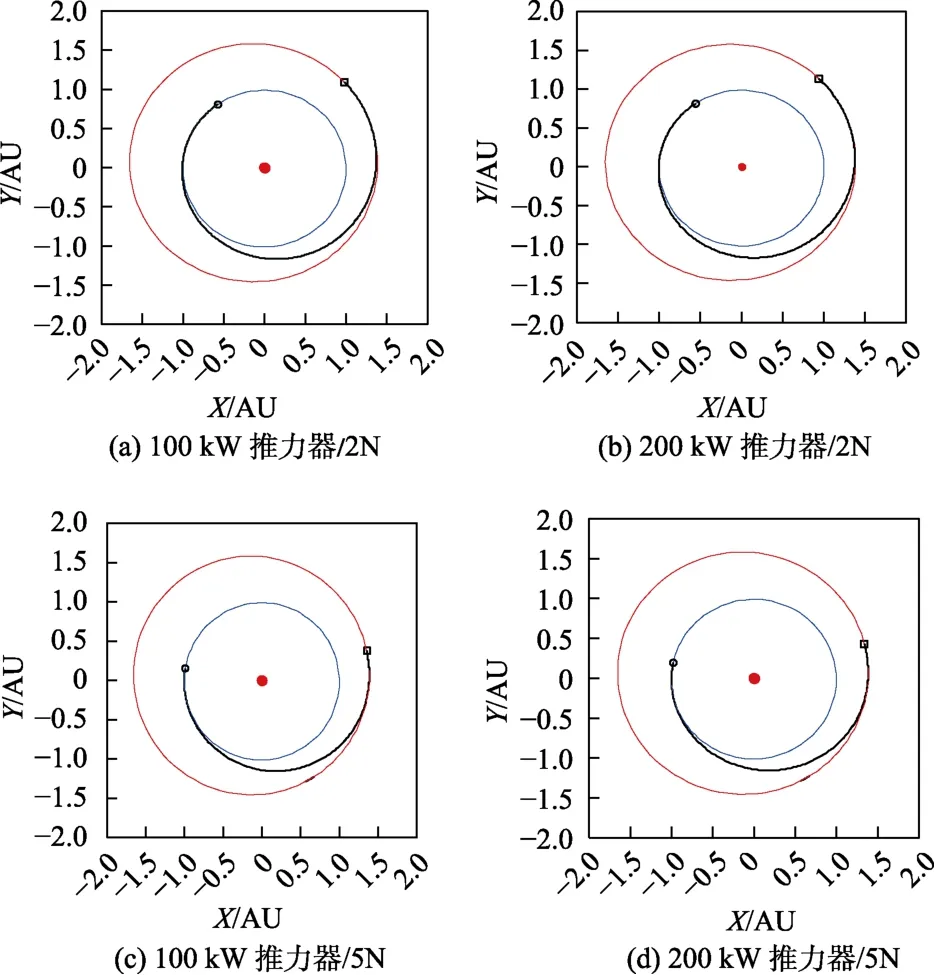
图2 地火转移轨道示意图Fig.2 Schematic diagram of transfer track from earth to Mars

表3 地火转移方案Table 3 Transfer program from earth to Mars
4.2 火星捕获及轨道间转移任务
4.2.1 环火轨道选择
一般地,环火轨道可以选择极轨圆轨道、冻结大椭圆轨道、火星倾斜同步轨道、静止轨道等。除了静止轨道,其余轨道均存在倾角,火星的非球形摄动将造成轨道升交点赤经的进动。这一特点将造成探测器向其他轨道转移时,除进行倾角调整外,还需进行升交点赤经的调整,这对系统的整体优化设计不利。此外,从火星捕获的速度增量需求角度考虑,探测器进入火星引力范围时的到达C3为零,环火轨道倾角等参数在到达火星引力范围附近即可达到目标值,无须额外的变轨。不妨取探测器始终沿速度反向进行减速,则探测器所需的速度增量仅与目标环火轨道的半长轴相关。因此,选择不同类型轨道对火星捕获的速度增量影响较小。为便于母体飞行器释放各任务探测器,同时减小轨道摄动对环火轨道的影响,初步设计母体飞行器的轨道为火星静止轨道。火星静止轨道参数如下:
(1)轨道半长轴:20427.71 km;
(2)轨道高度:17030.71 km;
(3)偏心:0;
(4)倾角:0;
(5)轨道周期:24.623 h。
4.2.2 火星捕获策略
探测器由星际空间进入火星引力范围,根据地火转移策略的设计结果,探测器到达火星的C3能量为零,探测器依靠电推力器工作逐渐进入目标环火轨道。由于火星捕获是火星逃逸的逆过程,且环火轨道为确定的目标,因此,可采用逆向设计的思路开展火星捕获轨道分析,火星捕获分析时,以目标轨道为初始轨道,探测器沿速度方向加速逃逸火星,逃逸的目标C3 为0。表4 给出了不同功率的推力器完成火星捕获所需的时间和燃料需求情况。分析表明,若采用比冲为5000 s 的2N 推力器,完成火星捕获并到达目标环火轨道需推力器工作长达64.2 天,燃料消耗约0.23 t。

表4 火星捕获方案Table 4 Scheme of Mars capture
为缩短探测器火星捕获时间,减小推进剂消耗,可以通过增大推力器功率,从而增大发动机推力和比冲实现。例如,采用比冲为4000 s 的5 N推力器,完成火星捕获并到达目标环火轨道推力器工作时间可缩短至24.2 天,燃料消耗约0.27 t。
4.3 轨道间转移与探测任务轨道分析
在被火星捕获后,火星多任务探测器的母体飞行器与各探测器形成分布式[21]火星探测系统,可完成火星的综合探测。
4.3.1 数据中继星座
火星数据中继星座如图3 所示,由3 颗静止轨道卫星和6 颗火星闪电轨道卫星组成。9 星星座可对火星任意地区连续实时覆盖,实现星间实时通信,可作为地火数据链路的一部分。星座中的每颗探测器与母体飞行器分离,由轨间转移飞行器运送至工作轨道。轨间转移飞行器具有6N推力器、6000 s 比冲的推进系统,将探测器运输至闪电工作轨道,往返一次预计所需速度增量为5000 m/s。假设轨间转移飞行器和探测器质量均为1000 kg,转移飞行器完成往返一次所需燃料为82 kg;由于母体飞行器位于静止轨道,轨间飞行器转运静止轨道中继星的燃料消耗较少,预留2 kg 即可。因此,轨间转移飞行器完成9 颗中继星的运输,往返18 次,燃料需求约500 kg。
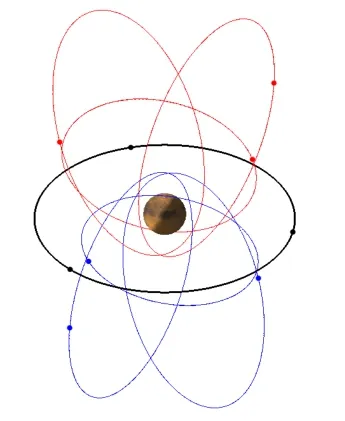
图3 火星数据中继星座示意图Fig.3 Constellations of Mars data relay
4.3.2 全火遥感
全火遥感卫星采用3 星组网,单颗星采用太阳同步圆轨道,轨道高度800 km,预计轨道转移飞行器往返一次所需速度增量为5600 m/s,所需

图4 全火遥感卫星星下点轨迹示意图Fig.4 Subsatellite point track of remote sensing satellites for Mars
4.3.3 火星大气详查探测器
火星大气详查探测器位于大椭圆轨道,缓慢进入火星大气,利用火星大气摄动效应缓慢进入,并在此过程中实时进行火星大气环境探测,将探测数据传回地面。参考MOM 探测器轨道,同时考虑到母体飞行器轨道,火星大气详查探测器可采用500 km×17031 km 大椭圆极轨轨道。运输器往返运输所需速度增量为3600 m/s,所需燃料约60 kg。
4.3.4 着陆巡视器
实施EDL,进行火星表面巡视探测,完成着陆巡视探测的燃料需求与着陆纬度相关,为保证全火任意位置的可着陆目标,运输器应具备倾角调整90°和轨道近地点高度调整为零的能力,运输器往返运输所需速度增量为4000 m/s,所需燃料约65 kg。
综上分析,多任务火星探测器在静止轨道上运行,完成各项任务探测,预计总的推进剂需求为925 kg。
5 结 论
本文提出了一种火星多任务探测器系统设想,介绍了系统基本组成、任务架构及轨道策略等。通过分析研究,得出以下结论:
(1)火星探测是深空探测领域从月球探测发展至行星探测的关键环节,而模块化多任务火星探测器系统是实现火星探测跨越式、可持续发展的重要途径;
(2)模块化多任务火星探测系统发展既可以带动深空探测技术与模块化航天器设计技术的发展,又可以促进火星探测的科学发现;
(3)发展模块化深空探测器,还需开展深空探测顶层任务设计、模块化航天器总体设计、在轨组装维护系统设计等关键技术攻关;
(4)所设计的火星多任务探测器表明,利用电推进技术开展未来大型复杂深空探测具有较高的可行性,且随着电推进技术的发展,探测器的入轨周期将进一步缩短,以满足探测周期需求。
