超声速导弹群协同博弈突防制导研究
2021-12-31陈洁卿孙瑞胜
陈洁卿,孙瑞胜,陈 伟
(南京理工大学能源与动力工程学院,南京 210094)
1 引 言
超声速导弹已经成为一种有效的快速反应和全球打击手段,引起了各国研究者的广泛关注[1]。鉴于其飞行速度快、突防能力强、飞行距离远、命中精度高、侵彻能力强等优势,未来的战争中,它将担负对时敏目标、移动目标和严密设防的高价值军事目标实施远程精确打击的任务。
超声速导弹飞行速度极快,大大缩短了敌防空系统反应时间,可有效击破敌防空反导系统[2],实现有效突防。现阶段,突防研究大多是将机动突防过程抽象为二人追逃问题,进攻方突防成功与否的衡量标准是拦截导弹的最大脱靶量,从而运用最优控制和微分对策等相关理论求解得到突防策略[3-8]。然而,用最优控制方法和微分对策来研究突防策略时,若系统模型过于复杂,即使问题的最优解存在,但在限定时间内通常也求不到解。因此,有学者提出将博弈论思想引入进突防问题的研究中。雷刚等[9]将博弈论方法运用到导弹与动能拦截武器(EKV)的攻防问题中。陈侠等[10]利用有限策略静态博弈模型解决了多无人机协同打击的攻防博弈问题。由于超声速导弹集群的系统模型较为复杂,且对实时性要求较高,所以本文提出一种博弈框架下的超声速导弹协同博弈突防制导律,以解决快速集群突防机动策略求解问题。值得注意的是,上述研究只考虑到攻防过程结束为止,并未进一步考虑到突防后对原定目标打击精度的影响。考虑到该需求,本文提出一种全过程收益函数,该函数将目标视为敌方博弈局中人的组成部分,建立打击能力评价函数,达到兼顾目标打击精度的目的。
除此之外,上述研究的主要对象以一对一攻防为主,并未进一步讨论集群攻防形式。伴随着战争由机械化转向信息化的过程,现代战争逐渐 变成了各体系之间的对峙[11-14]。熊思宇等[15]提出了基于逃逸机动并释放一枚防御器的主动防御策略的离散协同追踪-逃逸导引律。王少平等[16]采用人工设置虚拟目标的方式进行单平台多弹多方向协同突防制导律设计。在目前的集群博弈研究中,学者更加关注目标分配的问题[17-18],而采用集群博弈算法研究机动问题的较少[19]。针对以上问题,本文将对机动策略的研究转换为对机动空间的研究,以简化多弹机动策略研究的复杂度,并在收益函数中引入防碰撞能力评价函数,使得超声速导弹群可以在减少自身损耗的情况下成功突防。本文的主要贡献如下。
(1)为了解决超声速导弹集群突防的问题,本文引入博弈思想,提出了一种博弈框架下超声速导弹群协同突防制导算法。该算法利用最小转弯半径这一概念,将对机动过载的研究转换为对机动空间的研究,从而简化集群博弈模型。
(2)为了保证超声速导弹群在突防后仍具有目标打击能力,本文将目标点纳入防御方集群系统中,在收益函数的设计中引入目标打击能力函数,使得我方超声速导弹群在博弈突防过程中能够最大程度地保留对目标的打击能力。
(3)为了避免集群在协同攻击时发生碰撞,削弱我方战斗力,本文将集群成员之间的空间关系考虑进收益函数的计算中,保证超声速导弹群可以安全突防。
2 超声速导弹机动能力建模
2.1 超声速导弹模型建立
由于对突防问题的研究主要考虑弹道的位置而不是姿态,因此本文忽略绕质心的转动运动,对超声速导弹的质心运动进行研究,采用如下三自由度质点运动模型[20]:

式中,V为超声速导弹飞行速度,g为重力加速度,θ为弹道倾角,ψV为弹道偏角,x,y,z为超声速导弹在地面系下的位置坐标,nx、ny、nz为弹道系下的过载。
机动突防的策略核心是采用最优机动增大拦截导弹制导系统负担,使得拦截导弹制导指令超过最大机动过载[6]。从这一特点出发,我们可以利用过载约束对机动能力的影响建立超声速导弹的机动能力函数。
为了描述超声速导弹的机动能力,我们引入最小转弯半径的概念[20]:

式中,ρy、ρz分别为当前过载条件下纵向面和水平面内最小转弯半径(如图1)。

图1 转弯半径示意图Fig.1 Diagram of turning radius
从式(2)中可以看出,在给定速度和弹道倾角的情况下,过载越大,转弯半径越小,即最大可用过载可以得到最小转弯半径。如图1 所示,以水平面运动为例,当我方超声速导弹进入拦截弹的最小转弯半径区域内时,敌方拦截弹无法对我方超声速导弹群进行有效拦截,即突防成功。本文针对这一特性,在2.2 节建立了超声速导弹性能评价函数。
2.2 性能评价函数建立
根据2.1 节的分析,超声速导弹的机动能力与弹目距离、方位和过载约束等因素有关。首先定义超声速导弹i的纵向最小转弯半径原点(xiy0,yiy0,ziy0)和侧向最小转弯半径原点(xiz0,yiz0,ziz0)如下:

导弹i在纵向和侧向的最小转弯半径原点与超声速导弹j之间的距离向量分别定义为:

式中, (xj,yj,zj)是导弹j的坐标。接着对超声速导弹的攻击能力进行描述,超声速导弹i对导弹j在纵向平面和水平面投影内的攻击能力函数Cyij、Czij分别为:

从式(5)中可以看出,能力函数Cyij,Czij小于0说明超声速导弹i没有能力命中导弹j;反之,能力函数大于0 说明超声速导弹i具有命中导弹j的能力。由于在实际飞行中,存在如掉头反向飞行等特殊情况。因此,本文对特殊位置下的能力函数进行如下约束:
3 超声速导弹群攻防博弈模型建立
博弈模型的建立在于博弈三要素的设计,本文局中人的集为{我方超声速导弹集群,敌方防御系统}。其中,敌方防御系统包括拦截弹集群和目标。局中人的策略集在3.1 节建立,局中人的收益函数在3.2 节建立。
3.1 攻防双方的策略集
超声速导弹群作为进攻方,作战目的是使自己生存率最大的情况下命中敌方目标;防御方由拦截弹集群和目标组成,作战目的是减少超声速导弹集群对自己造成的损失。考虑到敌方作为防守方,可以通过探测设备提前获取我方攻击弹数量并做出反应。因此,本文假设拦截弹个数为n2,我方超声速导弹个数为n1,且n2≥n1,同时将三维运动分解为纵向面和水平面的运动,分别进行博弈策略的计算。由于本文的研究对象是集群整体,因此这里采用的策略集为集群成员的策略组合。我方集群法向和侧向机动策略集分别为S1y和S1z,敌方集群法向和侧向机动策略集分别为S2y和S2z。
3.2 零和博弈收益函数设计
在博弈机动的研究中,多数学者将收益函数设计为拦截面脱靶量,但没有考虑到突防后继续打击目标的能力以及协同突防中遇到的集群碰撞问题。针对以上问题,本节提出了一种收益函数的构造方法。这种收益函数由3 部分组成,分别为突防能力、目标打击能力和防碰撞能力。由于攻防博弈问题是一种典型的零和博弈问题,因此本节只对我方收益函数进行描述,并且纵向和侧向机动博弈的收益函数构造方法一致。
3.2.1 突防能力
超声速导弹i的突防能力可以由下式得到:
式中,下标j表示拦截弹集群成员。考虑我方超声速导弹群整体应保证尽量多的超声速导弹成功突防,因此我方集群突防总能力T1设计为:

3.2.2 目标打击能力
目标打击能力是指超声速导弹在突防后仍能打击目标的能力。从过载角度来说,只要目标在当前过载策略打击范围内,就可以采用一定的制导律实现精确打击。因此,本文将超声速导弹群对目标的打击能力D1定义为:

式中,下标t表示目标。
3.2.3 防碰撞能力
防碰撞能力是指集群成员之间保持安全距离的能力。本文采用防碰撞预警范围(如图2)对集群成员间距离进行描述。
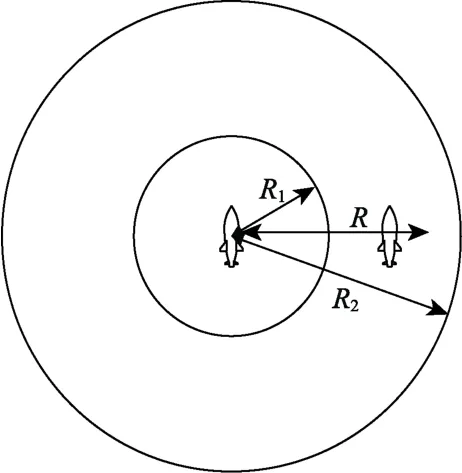
图2 防碰撞预警范围示意图Fig.2 Diagram of anti-collision warning ranges
图2 中,R为成员间距离,R1为碰撞警告半径,R2为碰撞预警半径。描述防碰撞能力P如下:
除了我方集群的防碰撞能力会影响我方最终收益,敌方集群的防碰撞能力也会影响整体局势,从而对我方收益造成影响。考虑超声速导弹群整体,防碰撞能力P1设计为:

式中,Pi和Pj分别为我方和敌方成员导弹的防碰撞能力值。
3.2.4 收益函数计算
以上3 部分对收益函数的影响比重不一样,且随着两个集群间距离的变化而变化。因此,收益函数定义如下:

式中,ηT(t)、ηD(t)、ηP(t)为权值函数,满足ηT(t)+ηD(t)+ηP(t) = 1。
对上述收益函数求解纳什均衡解,就可以得到机动策略。需要说明的是,在博弈初期,各策略集的收益函数差别不大,可以选择任意一个纳什均衡解作为试探性机动策略。
3.3 零和博弈纳什均衡解求解
博弈问题的求解就是要寻找一个稳定的策略组合,这个策略组合有一个特点,即每个博弈方的策略选择,都是相对于其他博弈方的最优策略选择,这就引出了纳什均衡的概念。
定义 1[21]:对于有2 个博弈方参与的博弈Z={S1,S2;W1,W2}中,其中S1,S2分别为局中人1和局中人2 的策略集合,W1,W2分别为局中人1和局中人2 的收益,如果在由每个博弈方的一个策略所组成的策略组合(z1*,z*2)中,其中任一博弈方i的策略zi*,都是应对其他博弈方组合的最佳策略,也即

对任意∈Si都成立,则称(z1*,z*2)为博弈的一个纳什均衡。
本文将纳什均衡求解过程简化为最优问题,采用如下优化过程进行求解。
如图3 所示,图中是以敌我双方为自变量的我方收益值。首先对每列求最大值,找到在同一敌方策略条件下我方能获得的最大收益;然后对每行求最小值,找到在同一我方策略条件下敌方能获得的最大收益。对两组最优值的位置进行分析,得出同时满足两个条件的策略值。若无解,则对次优解进行分析,直至找到双方满意的策略。在这个过程中,存在两种特殊情况,一是有多个策略满足最优解,二是找到最后没有纳什均衡解。在上述情况下,设定双方选择各自策略集中的第一个策略解。

图3 纳什均衡解求解示意图Fig.3 Diagram of solving Nash equilibrium solution
4 仿真验证
4.1 仿真条件
本章分别从拦截弹采用拦截策略和比例导引律两种情况对本文提出的突防制导律进行仿真验证。为了区分敌我双方仿真条件及结果,记下标1 为我方,下标2 为敌方。敌我双方集群成员初始状态如表1 所示。

表1 敌我双方集群成员初始状态Table 1 Attacker and defender's initial states
我方轴向过载为nx1=-0 .8,我方轴向过载为nx2=0.2,目标点坐标为(60,0,0) km。权值函数设置为ηT=0.0000067(max(x2) -min(x1))+0.4,ηT(0) = 0.8,ηP= 0.05。警告距离R1=200 m,预警距离R2=1000 m。设每个博弈阶段持续时间为0.5 s,拦截弹个数为4,我方导弹个数为3。当拦截弹与目标机动比大于2 时,就能产生较小的拦截脱靶量[22],不利于突防。因此这里假设拦截弹侧向最大过载为6g,法向最大过载为20g;超声速导弹侧向最大过载为3g,法向最大过载为10g,这里采用的策略集为集群成员的策略组合(见表2~表3)。其中,nyk#m,nzk#m(k=1,2;m=1,2,3,4)为集群成员导弹的过载指令,nyk#m< 0表示导弹垂直向下机动,nyk#m> 0表示导弹垂直向上机动,nzk#m< 0 表示导弹从导弹尾部看向左机动,nzk#m> 0表示导弹从导弹尾部看向右机动。策略集分别为S1y={S1y1…S1y8},S1z={S1z1…S1z8},S2y={S2y1…S2y16},S2z={S2z1…S2z16}。

表2 敌我双方纵向机动博弈策略集 Table 2 Attacker and defender's longitudinal game strategy sets
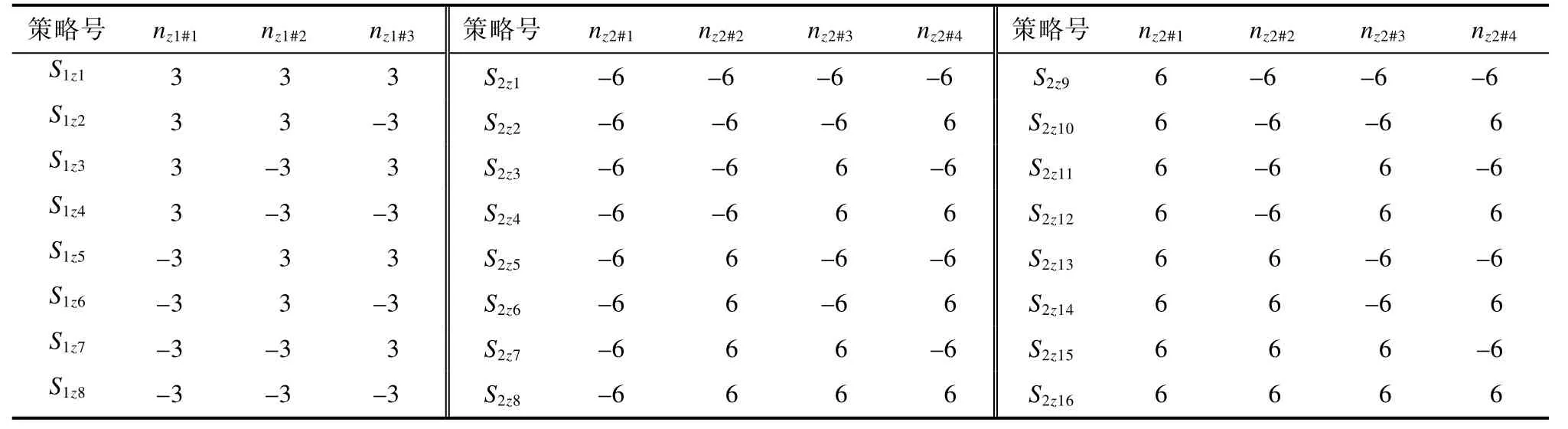
表3 敌我双方集群侧向机动博弈策略集Table 3 Attacker and defender's lateral game strategy sets
4.2 仿真结果
4.2.1 拦截弹采用拦截策略下的验证结果
从图4 可以看出,在突防/拦截结束时,我方纵向面和水平面的收益值都大于0,这意味着我方集群在攻防博弈中处于有利形势。在博弈初始阶段,我方收益值小于0,这说明在博弈初期,攻防双方都有着较大的机动空间,拦截集群的机动性能优于我方超声速导弹集群,具备拦截能力。但是随着我方集群根据当前空间位置关系进行实时机动,收益值随之增加,到了突防/拦截结束时,获得了正收益。

图4 我方收益值Fig.4 Attacker's payoff value
从图5~6 中可以看出,突防能力、目标打击能力和防碰撞能力的收益值在突防/拦截结束时皆大于0,这表明我方集群在具备对目标打击能力的情况下可以成功突防,且集群内无碰撞。其中,水平面内突防收益值较小,这是由于水平面速度分量较小,且在侧向机动能力小于纵向机动能力的情况下,水平面机动空间远小于纵向面机动空间,超声速导弹集群躲避困难。
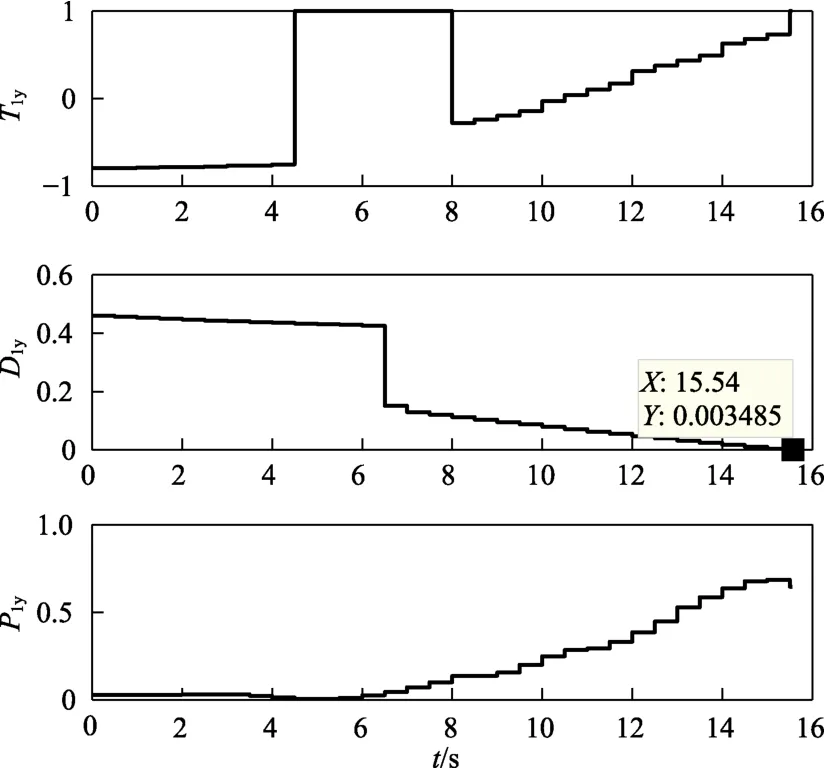
图5 我方纵向面收益值分量Fig.5 Attacker's longitudinal payoff value

图6 我方水平面收益值分量Fig.6 Attacker's lateral payoff value
图7~8 是敌我双方的机动指令曲线。由于本文只给了有限策略集,因此导弹为了达到期望的机动效果,会不断切换指令。并且策略集中的机动指令越大,切换的越频繁,这一现象在图8 的法向过载图中尤为明显。图9~10 是弹道轨迹图,可以看出,在整个博弈过程中,我方超声速导弹 集群没有出现碰撞和被拦截的情况。在图9 中可以看到,由于突防能力(7)设计为超声速弹群突防能力的最小值,因此拦截弹群主要对超声速导弹#3 进行拦截,且拦截弹群在后期已经不具备拦截能力。因此,弹道向下,以期望拉开与超声速导弹集群之间的距离,使得超声速导弹集群回到自己的攻击区内。由于导弹速度高,弹目距离短,我方导弹为了打中目标,机动指令切换次数较少。超声速导弹#1 和#2 的初始弹道倾角绝对值较小,在一开始采用正过载来躲避拦截,在敌我集群距离进一步缩短后,探测到拦截弹威胁降低,采用负过载用于打击目标。超声速导弹#3 初始弹道倾角绝对值较大,为了避免与拦截弹正面碰撞,采用低伸弹道进行躲避,后期采用正过载以保证打击目标的射程要求。从图8 中可以看到,在博弈初期,敌我集群相距较远,各方处在试探机动阶段。随着距离缩短,双方开始出现目的性机动。在博弈初期,由于超声速导弹群不在目标点z=0附近,因此初始试探机动主要目的为打中目标。随着拦截弹集群向超声速导弹集群方向移动,超声速导弹#3 先进行了躲避,安全后调整为打击目标。超声速导弹#1 大部分时间用于躲避拦截,在后期打击目标的需求增大后,进行了侧向指令的切换。

图7 我方超声速导弹最大需用过载Fig.7 Attacker's maximum overload

图8 敌方拦截弹最大需用过载Fig.8 Defender's maximum overload

图9 纵向面运动轨迹Fig.9 Longitudinal trajectory
4.2.2 拦截弹采用比例导引律下的验证结果
相比于使用拦截策略,采用比例导引律制导的拦截弹由于加入了针对突防弹的导引,使得突防形势更为严峻。从图11 可以看出,在突防/拦截结束时,我方集群在攻防博弈中处于有利形势。 从图12~13 中可以看出,能力收益值在突防/拦截结束时皆大于0,数值上相比于4.2.1 节更接近于0。这是由于超声速导弹群为了尽可能躲避拦截弹,牺牲了较多打击能力。
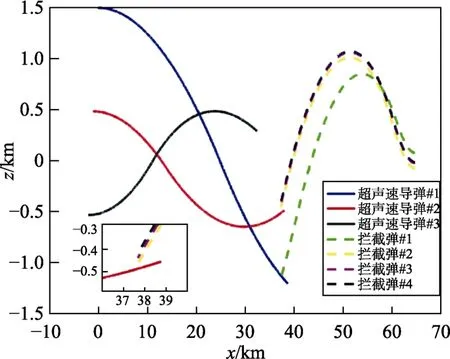
图10 水平面运动轨迹Fig.10 Lateral trajectory
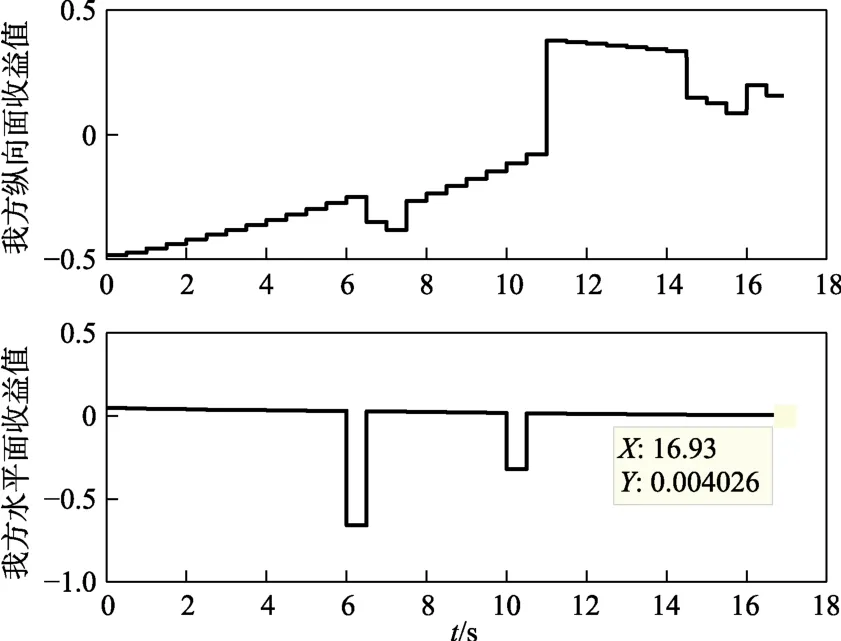
图11 我方收益值Fig.11 Attacker's payoff value

图12 我方纵向面收益值分量Fig.12 Attacker's longitudinal payoff value
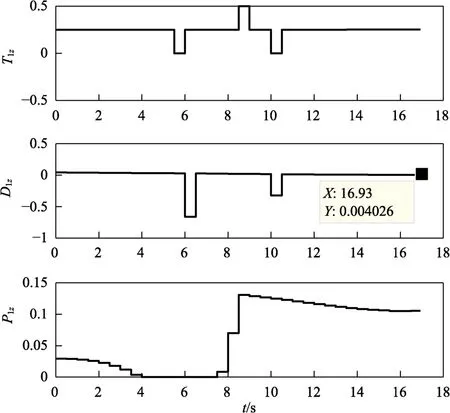
图13 我方水平面收益值分量Fig.13 Attacker's lateral payoff value
由于超声速导弹群在博弈时仍假想拦截弹群采用博弈策略,因此在指令的切换规律以及弹道规律上与4.2.1 节基本一致(图14)。从图15 可以看出,拦截弹群越靠近超声速弹群,其制导指令越大,在末段进行较大机动,但仍未拦截成功。从图16~17 可以看出,拦截弹有针对性地进行了目标分配,并实施拦截打击,但由于博弈过程速度快,时间短,拦截弹群在超声速导弹突防机动的情况下未能及时抓住拦截时机。
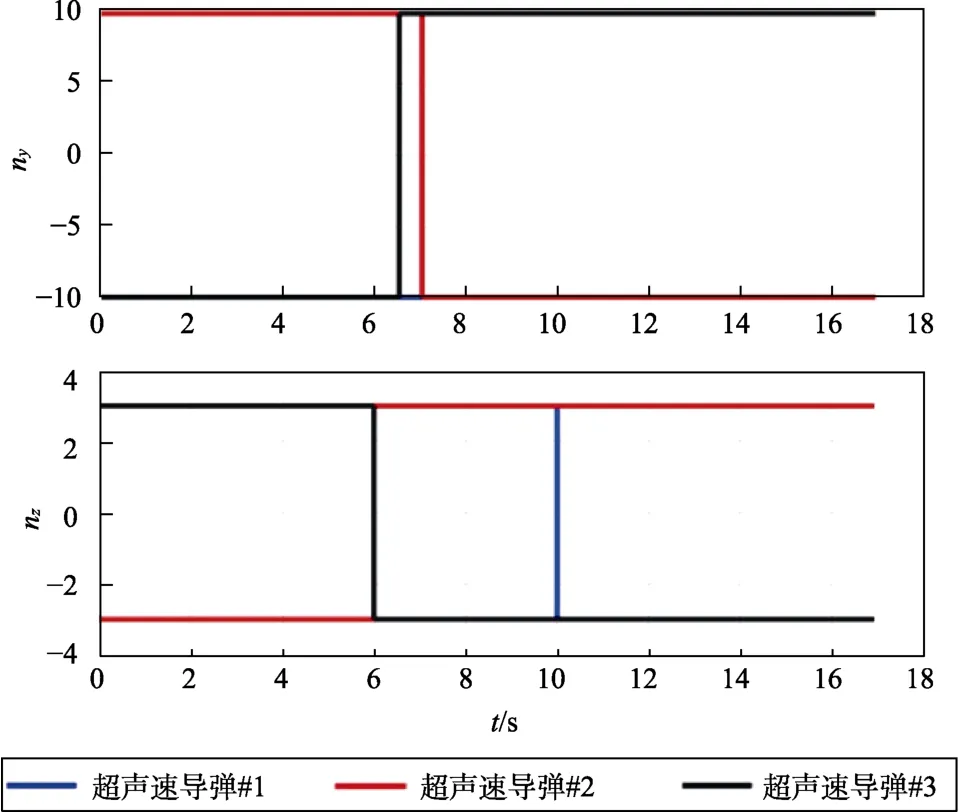
图14 我方超声速导弹最大需用过载Fig.14 Attacker's maximum overload

图15 敌方拦截弹最大需用过载Fig.15 Defender's maximum overload

图16 纵向面运动轨迹Fig.16 Longitudinal trajectory
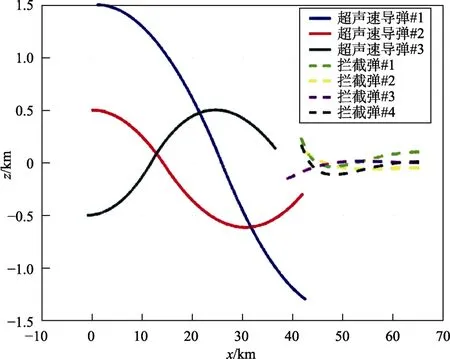
图17 水平面运动轨迹Fig.17 Lateral trajectory
5 结 论
本文研究的目的是针对超声速导弹群设计一种基于博弈思想的协同制导律。所提出的博弈制导律的主要优点是将导弹的机动能力作为博弈的收益函数的主要设计依据,从而简化设计。所设计的收益函数的主要贡献是考虑了突防后目标打击能力和群组间防碰撞能力,更加具备实战化的应用优势。仿真结果验证了所提出的博弈协同制导律可以有效安全突防并具备目标打击能力。本文为超声速导弹集群多对多攻防研究提供了一种新的解决方案。
