基于智能网联汽车实验教学设备的研究
2021-12-23张国凌
张国凌


摘 要:智能网联汽车技术成为汽车产业发展的必然趋势。智能网联汽车,即自主式自动驾驶汽车+网联式汽车。自主式自动驾驶汽车可以使用各种传感器保证自车与其他车辆、其他物体的安全距离;网联式汽车则可实现车与车、车与设施、车与人、车与互联网的实时在线通信。本文主要是针对智能网联汽车自制实验教学设备研制的意义、方法、内容、工作原理、技术路线、教学实验功能、开发成果和创新点等内容进行分析和探究,希望给予我们汽车服务工程专业的实践教学和汽车爱好者以些许参考和借鉴。
关键词:智能网联汽车 原理 实验教学 设备 创新
Research on Experimental Teaching Equipment of Automobile Based on Intelligent Network
Zhang Guoling
Abstract:Intelligent and connected automobile technology has become an inevitable trend in the development of the automobile industry. Intelligent connected cars is also referred to as autonomous self-driving cars + connected cars. Autonomous self-driving cars can use various sensors to ensure a safe distance between their own cars and other vehicles and other objects; connected cars can realize real-time online communication between cars, cars and facilities, cars and people, and cars and the Internet. This article mainly analyzes and explores the meaning, method, content, working principle, technical route, teaching experiment function, development results and innovation points of the development of self-made experimental teaching equipment for intelligent networked vehicles, and hopes to give some reference to practical teaching and car enthusiasts.
Key words:intelligent connected vehicle, principle, experimental teaching, equipment, innovation
1 智能網联汽车实验教学设备研制的意义
2020年2月24日,由国家发改委、中央网信办、科技部、工信部、公安部、财政部、自然资源部、住建部、交通运输部、商务部、国家市场监管总局等11个部委联合下发《智能汽车创新发展战略》,从国家战略层面明确了智能网联汽车产业的发展地位,为智能汽车产业的未来发展指明方向,引起了国内智能网联汽车全产业链的广泛关注。《战略》中指出,到2025年,中国标准智能汽车的技术创新、产业生态、基础设施、法规标准、产品监督和网络安全体系将基本形成,能够实现有条件自动驾驶的智能网联汽车达到规模化生产,实现高度自动驾驶的智能网联汽车在特定环境下市场化应用。电动化、智能化、网联化和共享化在近十年间,已经成为汽车行业发展的主流趋势,行业转型和变革正走向深化,而此时《战略》的出炉,更是顺应了这一趋势,这对于汽车电子行业、汽车智能网联技术服务行业来说,无疑是巨大的机遇,其发展必然带来相关产业和人类生活的深度变革。
全球联网汽车数量快速提升,中国也将成最大市场。截止2020年底,全球联网汽车渗透率已达到98%,包含通过车载系统联网、通过有线方式联网、通过智能手机联网等多种联网方式;到2025年,联网汽车渗透率将达100%。截止2020年底,中国车联网市场规模已达300亿美元。
智能网联汽车实验教学设备主要应用于车辆工程、汽车服务工程专业汽车智能网联技术方向,教师科研、学生教学实验,可进行自动驾驶软件开发、高精地图建图、视觉传感器标定、激光雷达感知、线控底盘、高精惯性导航、5G通讯、融合感知、车路协同等新技术的教学、实验、装调测试等教学课程。也可作为智能网联汽车概论、(线控底盘)ADAS高级驾驶辅助系统技术课程、智能座舱系统技术课程、车载网络技术课程、车辆通信系统技术课程、智能网联汽车整车综合测试技术课程的实训实验教学设备。
智能驾驶在国家政策的驱动下正在逐步兴起,距离落地商用尚需时日。尤其单车智能驾驶能力还需要突破。但是院校人才培养的协同推进,无疑能够加快智能驾驶的步伐。未来道路上将铺上更多的电子设施,智能网联汽车犹如一个核心载体,把物联网、5G、智能交通、智慧城市、人工智能等技术融合在一起,体现一个国家的综合科技实力,很多国家和大型公司都在大力投入。学生掌握了这些核心技术,又可以应用在其它生产和生活方面,加快生产建设和改善人类的生活。智能网联汽车实验教学设备研发,可以给院校车辆工程、汽车服务工程专业智能网联汽车技术方向带来如下价值:
(1)提升学生在无人驾驶领域的技术和就业能力。
(2)提升学生软件开发能力,根据自身需求制定软件功能,可以扩充出丰富多彩的应用,通过不断优化系统运行效果,实现技能提升。
(3)感知、规划、控制等关键技术模块实验,优化软件系统和算法,采集到大量数据为无人驾驶进一步科学实验做准备。
(4)用于培养大量智能网联汽车技术人才。
本项目设备开发完成后,可以在特定封闭环境下实现无人驾驶配送和巡逻等运营,例如工业园区、学校、医院等。尤其在学校领域,教师可以带领学生参与到具体模块的科研和实验,包括交通运输、人工智能、汽车、物流、计算机等院系。
另外,本项目设备部分代码开源,针对具体应用场景用户都可以提供更新代码,加快系统优化。
2 自制实验设备的具体内容
2.1 实验教学设备介绍
本实验教学设备根据智能网联汽车业界实际发展前沿技术,兼顾现阶段教学任务和未来技术拓展需要,开发的丰富实用的教学实验系统。适用于院校教师科研、教学演示、学生实验和毕业设计需求。系统中配置了自动驾驶主控制器作为智能网联汽车实训平台的“大脑”。自动驾驶主控制器主要用于处理复杂数据,做出精确地控制决策,用于教师及学生科研和教学实验。配合传感器和底盘,易于展现各个传感器和相关功能,让学生理解设备开发、传感器适配连接和工作原理,完成智能网联汽车编程、开发、安装调试、标定、故障诊断等技能学习。
2.1.1 設备组成
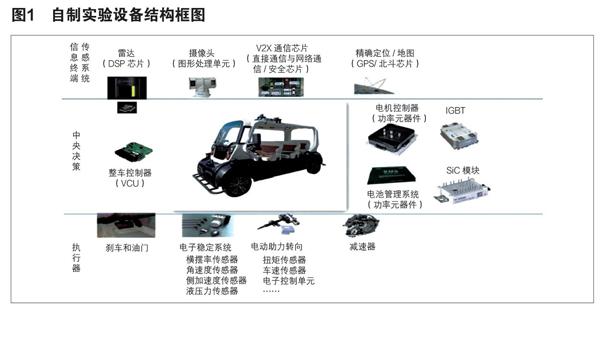
智能驾驶低速车由车规级单伺服电机驱动系统(后桥)、伺服电机转向系统(前桥)、车规级底盘控制器、自动驾驶控制单元、GPS组合惯性导航装置、16线激光雷达、车载5G通讯模块、单目摄像头、超声波雷达、中控操作屏、传感器专用安装支架、APP调度软件、76.8V锂电池组、车载锂电池管理系统、驱动电机控制器、转向电机控制器、DC/DC转换模块、车载充电机、碰撞急停保护装置、外部灯光系统等车规级电气系统及CAN网络通讯系统组成(如图1),线控驱动/转向/制动控制系统及执行元件响应速度快、反馈精度高,达到车规级需求,车辆支持遥控操作及自动驾驶两种模式。
2.1.2 设备基础参数:
电控:
线控转向系统、线控油门、线控制动系统
电池: 锂电池,72V/106Ah
电机: 5千瓦电机
充电机:
便携式全智能充电机,充满自动断电
充电时间: 4小时
续航里程: 100公里
最大行驶速度: 20KM/H
制动距离: ≤4m
整车装备质量: ≤500kg
整车荷载: ≤450kg
最大爬坡: 20%
最小转弯半径: 3.5m
英特尔?至强?
E3 v5 CPU NVIDIA? GPU
惯性导航单元:
惯性导航系统(IMU)CAN和以太网通信;
差分基站:
提供不小于3CM的定位服务;
路由: 华为;
4G通信卡: 提供网络服务;
转向角传感器模块:工作电压: 12V;零点标定:通过CAN指定任意位置为零点;测量角度范围:-720°~+720°;角度分辨率:0.1°;角速度分辨率:4°/s;精度: ≤±2.5°;通讯接口:CAN;通讯速率: 500k/s;其他:含有转角信号输出机构(电驱动),能够使传感器采集到转角数据。
摄像头:支持USB3.0高速接口;内置于AP0101 ISP;半导体:AR0143 Z1080P HD 传感器;像素大小:3.0umx3.0um;
超声波雷达:额定工作电压:DC12V;探测距离:0.3M-5M;探测水平角: 90±5°;探测垂直角:38±3°;频率: 55.5kHz±0.5kHz。
线激光雷达:16路输出,200米探测,20HZ,输出速率32万点/秒可达到±15°的垂直视场角。
监控显示器:23.6寸;逆变器:72v转 220v。
2.2 工作原理
本教学实验设备以车内自动驾驶系统控制单元为主来实现自动驾驶控制功能,测试实验环境下,自动驾驶系统控制单元根据激光雷达进行高精地图绘制,检测车辆行驶环境周边的障碍物,控制线控底盘进行制动、避障等操作;在有车道线和红绿灯的路况环境下,自动驾驶控制单元依靠摄像头视觉感知进行巡线行驶、红绿灯识别、障碍物(车辆、行人)识别,控制车辆安全行驶。近距离情况下,自动驾驶控制单元根据超声波雷达识别障碍物距离,保证安全行驶;自动驾驶模式下,车速约10km/h,按照规划的路线,实现点对点的自动驾驶功能。行驶中可实现合理的路径规划、障碍物绕行、自主紧急制动等功能(如图2)。并且可通过调度平台或手机APP远程查看车辆状况及行驶过程中的影像,以及实现远程调度功能。基于该设备,能够从感知、决策、控制三个方面进行智能网联汽车的全方位实验教学。
2.3 技术路线
自动驾驶技术目前分为两大技术路线:
(1)以汽车制造商为代表的ADAS和单车智能技术路线。
(2)以互联网企业为代表的人工智能和网联化技术路线。
本项目采用人工智能和网联化技术路线,则直接依靠智能计算及网络通信实现对汽车的控制。采用环境信息感知识别-系统智能决策控制的技术框架,自动驾驶技术集自动控制、复杂系统、人工智能、机器视觉等于一体,收集云端和车载传感器的车联网数据、地理信息数据、环境感知数据等信息,识别车辆驾驶区域的环境特征,进行任务设定和控制规划(如图3)。
3 自制设备的开发成果
3.1 基于5G通信、车路协同等物联网技术的智慧通信开发成果
本项目应用场景将需要建立一个自动驾驶闭环系统,车与车、车与路、车与云之间以及智慧交通中各种新型末端节点都要建立5G通信。如何保证各个末端节点和终端灵活建立网络,并保证准确无误地实现信息传输,是智能网联汽车的关键技术(如图4)。本项目通过对5G物联网技术深入研究,探索解决智能驾驶的智慧通信,解决实际应用问题。
3.2 感知、融合、决策、控制等无人驾驶汽车算法开发成果
软件系统采用开源系统作为基础(Linux + 自动驾驶应用软件),针对每个模块应用进行深入研发。主要包括感知、融合、决策、控制、定位等几个模块。开发语言主要为c++和python。
感知:通过图像视觉处理,或者点云数据分割处理,结合深度学习技术,识别出周围障碍物信息(包括大小、分类、动向)。
融合:对雷达和摄像头的数据信息进行感知融合。
决策:对识别到的障碍物进行预测,预判其动向。同时根据目的地和具体定位的环境信息,规划出车辆前进轨迹路线。
控制:根据规划发送过来的速度和位置相关信息,计算出油门、制动、转向数值,发送到CAN总线上。
定位:通过GPS组合惯导和激光雷达进行融合定位,配合高精度地图,完成厘米级定位。
3.3 无人接驳车、无人配送车、无人清洁车等智能驾驶车智慧系统的应用场景开发成果
研发系统选用低速物流车底盘作为线控底盘,并进行限速,可以实现封闭场景的无人驾驶运行,可以根据应用场景制作高精度地图,搭配GPS组合惯导实现厘米级高精度定位,低速自动驾驶,可以根据需要扩展功能,实现封闭场景物流和巡逻等应用。根据场景实际条件,部署物联网终端应用设备,一些升级、数据运算和数据维护管理都可以放到云端进行,通过5G和终端节点进行数据交互。
4 教学实验功能
(1)软件系统中带有车辆控制协议代码生成软件,学生理解DBC(Database Can)文件的基本结构后,可以用该软件工具对DBC文件进行解析,很快生成该车辆的控制协议代码。该代码功能就是前述提到的完成底盘动作控制报文填充和状态读取上报。这个环节,让实验人员明白所有无人驾驶汽车是如何在最底层上和车辆硬件交互的,并且如何实现程序标准化,规范化。
(2)智能驾驶车辆底盘综合控制实验:通过CAN协议控制车辆加减速,转向,驾驶模式切换等(该实验需要确保安全,随时注意接管,建议在举升机或测功机上进行试验)。
软件部署到工控机上,通过CAN总线连接到车辆底盘,此时我们就可以进入软件系统,发命令控制底盘,底盘线控功能是否准确,是否像预想的一样可以线控,我们需要通过实验进行检验。底盘协议验证软件操作界面,通过发送不同含义的CAN协议代码,控制车辆前进、后退、左转、右转、加速、制动等实训内容。
打开另一个窗口,我们可以查看底盘反馈上来的信号,是否是我们下发的控制值(转向、档位、速度、加速度等)。类似这样的底盘数据上报,包括电机转速,电机控制器状态等等,都可以扩展编程,实现实用的数据分析控制。
(3)智能驾驶GPS定位实验(室外环境空阔场地)
当前智能驾驶的定位技术主要依靠GPS,其精度可以达到厘米级,软件在定位模块使用的是GPS 差分定位。配置了GPS系统设置软件和文档,可以方便地对GPS进行配置,通过GPS实验可以学习理解GPS的配置过程和工作原理。
实验人员需要先根据GPS硬件连接图,把IMU惯导和GPS天线连接正确,并设置好合适的杆臂值,杆臂值用于完成GPS天线到车身的坐标系转换,理解这个过程对后续的传感器标定理解有很大帮助。
(4)智能驾驶传感器标定实验。
传感器之间需要标定,才能让彼此知道相对位置,增加控制的精确度。主要是外参标定。包括激光雷达到IMU之间的标定,摄像头到IMU之间的标定。开发了标定的软硬件工具,按照既定步骤可以快速完成标定,标定是后续感知实验的基础。
(5)智能驾驶视觉感知实验。
智能驾驶对外界障碍物的感知,主要用来传感器和计算单元对传感器数据的分析。目前最为流行的是激光雷达感知和摄像头视觉感知。其中摄像头视觉感知的原理是收集到图像数据后,使用数据进行机器学习模型对比分析,得到障碍物类型并输出。
本系统软件带有机器学习训练模型并可以直接使用,实验人员也可以做出自己的学习训练模型(需要较大工作量),进行算法验证创新。
(6)智能驾驶超声波探测实验。
超声波达用于近距离探测,用于泊车等近距离物体预警。实验人员可以通过开发的实验例程观察到近距离物体的识别情况,包括物体的距离等。
(7)智能驾驶激光雷达探测实验。
激光雷达用于智能驾驶的障碍物识别和辅助定位,是智能驾驶中的一个重要研究方向。点云数据采集后,根据系统软件带的机器学习模型匹配分析,得出障碍物形状、距离和移动方向等,然后感知模块把这些信息报给规划决策层,从而引导车辆进行相应反应。
通过开发的激光雷达的实验课程,可以深度理解障碍物是如何被激光雷达探测到的,探测性能如何以及如何把探测结果用于系统控制。
(8)简单道路地图制作实验。
地图是智能驾驶一个很重要的模块,高精度地图制作成本高,一般都需要高昂的费用。为便于学习,开发了简易地图生成程序,供实验使用。实验人员按照程序的既定步骤按自己的需求生成二维或三维地图,并在后续的环境定位和规划路径中进行使用,也可以根据需要自己修改该生成程序,实现更有意义的地图实验。
(9)智能驾驶避障实验。
前述实验都做完以后,实验人员可以进行综合的自动驾驶实验,找空旷场地,让车辆沿着简单地图前进,遇到人就减速/变道绕开/停车,到终点就停下来。
根据实验结果不断调整规划和控制参数,例如二维情况下障碍物的膨胀系数,三维情况下多边形的最短阈值等参数,让车辆运行良好,实现自动驾驶功能。
此实验可以作为课程设计,鼓励学生提出新颖想法,实现很多研究创新。
5 本自制设备的创新点
(1)该“智能网联汽车自制设备”工控机预留开发扩展功能,与市场多数同类型设备仅能实现简单封闭场景的无人驾驶体验相比,该自制设备可配合学校的地图,实现校园内物流、巡逻等多场景应用。
(2)该“智能网联汽车自制设备”可通过调度平台或手机APP远程查看车辆状况及行驶过程中的影像,以及实现远程调度功能。基于该设备,能够从感知、决策、控制三个方面进行智能网联汽车的全方位实训教学。
(3)与市场多数同类型设备智能驾驶的定位技术主要依靠GPS相比,本次研发的软件在定位模块使用的是GPS 差分定位,其精度可以达到厘米级定位。并配置有GPS系统设置软件和文档,可以方便地对GPS进行配置,通过GPS实验可以学习理解GPS的配置过程和工作原理。
(4)市場多数同类型设备在感知外界障碍物时,多用激光雷达和摄像头视觉的融合,仅能从移动方向距离,具体方位上判断有障碍物存在,无法判断具体障碍物是何物,不具备机器训练模型学习功能。本次研发的软件带有机器学习训练模型,可以直接使用,实验人员也可以做出自己的学习训练模型,进行算法验证创新。
(5)线控底盘的控制性能决定了整个无人驾驶车的运动水平。当底盘控制效果不佳时,往往涉及很多方面的问题,包括计算机是否正常及时下发指令,底盘是否响应,传输延时,车辆机械部件是否准确执行,是否及时反馈状态等等。涉及多模块多线程的综合分析追查,如果没有一个软件工具进行系统调试,很难定位问题根源。目前市场同类型设备均无线控底盘的分析软件。本次研发的汽车运动系统分析软件能够分析底盘车的线控性能和运动性能,分析其转向、制动、驱动的响应性能,给出响应延迟时间和车身运动的横向纵向控制性能结果。输入为分析无人驾驶车运动的数据,输出以曲线和参数的形式给出。该软件能够全方位展示车辆的运动效果和缺陷,快速给学生和研究人员提供问题分析思路和方向指导。
