非局部相似性压缩感知下的医学设备三维成像方法
2021-12-18沈海荣张力杰
沈海荣 张力杰
0 引言
压缩感知是一种以矩阵分析、概率计算、统计优化为基础的信息获取与处理模式,其基于获取信号的压缩性,通过非相关观测低位空间感知高维信号,以一定的概率恢复原信号,即从少量的采集样本中恢复原始数据,并在保证图像质量的前提下,使其具备较高的计算效率。近年来,我国的医学水平得到了突飞猛进的发展,人们对医疗设备提出了更高的要求,其中,三维成像技术在医学设备中得到了广泛应用,也成为了当下的研究热点之一。文献[1]将传统视频编码中的多假设预测运动估计思想引入到分布式压缩感知视频编码系统中,对非局部相似性的思想进行改进,利用加权非局部相似性生成相似块,改善了视频序列的重构质量。文献[2]从相似图像块非局部相似性和梯度稀疏性出发,提出一种基于结构特征先验约束两阶段重构的多假设预测视频压缩感知方法,有效提高重构性能,为后续残差重构打下基础。
但是以上方法难以获取像素间的领域结构信息,无法分析医学设备图像子块相似性,因此,本文拟对非局部相似性压缩感知下的医学设备三维成像方法进行深入研究,以小波变换为基础对三维成像进行多尺度分块,稳定采样频率,获取像素间的领域结构信息;将分块投影与特征重构结合起来,利用自回归模型模拟医学设备三维成像的非局部状态,分析医学设备图像子块相似性。以此提高三维成像图像的重建和优化效率,保证医学设备三维成像质量,促进压缩传感技术与医学领域的有效结合。
1 医学设备图像的多尺度分块采样与压缩感知方法
1.1 医学设备图像的多尺度分块采样
在医学设备成像中,压缩感知的应用主要体现在对医学影像成像(例如X线、MRI、CT等)信号获取与处理上面,因此,需要进行多尺度分块采样分析,即通过医学设备结构的基本分块数据,获取与训练医学设备的多尺度信息。其中,医学设备结构的基本分块模式如图1所示。
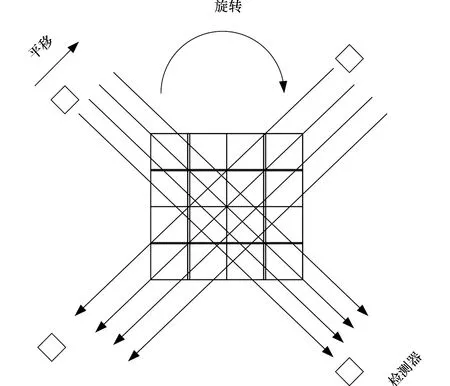
图1 医学设备结构的基本分块模式Figure 1 Basic block mode of medical equipment structure
图1中,医学设备在使用过程中,需要不断变换运行状态,干扰采样过程,因此,利用冗余字典或训练字典稀疏表示方法,优化成像的数据预处理阶段,即从多块图像中重构多尺度信息,即:
(1)
式中:x表示原始多尺度信息;ψ值对应图像稀疏变换的基向量;Φ表示多尺度分块矩阵;y表示图像进行多尺度分块时的基础观测值[3]。
将需要压缩感知的三维成像的每一个具有意义的点集成一个数据集合,成像表面的各个像素点可以推测出成像非局部相似的关联程度,并且对集合内部的像素点进行数据训练。
1.2 医学设备图像的压缩感知方法
采用冗余字典或训练字典稀疏表示方法捕捉到医学设备图像的投影信息后,结合图像在变化域中具有稀疏性的特点,稀疏表示图像的压缩感知数据[4-5],首先,将分得的多尺度图像子块表示为:
xj=Rjx,j=1,2,…,N
(2)
式中:N表示子块数量;R表示子块函数。
根据子块函数,将分解的图像进行子块重叠,并在重构原始图像时,对重叠子块进行平均加权,则重构图像可以由重叠子块x1进行冗余稀疏表示:
(3)
式中:aj表示重叠子块的稀疏系数。结合式(2),可以得到基于冗余字典稀疏表示的多尺度分块的压缩感知表达式为:
(4)
与冗余词典稀疏表示不同的是,基于训练字典稀疏表示的成像多尺度分块的压缩感知方法,首先需要获得一组关于原始图像的局部图像集合,局部图像集合由多个高质量局部图像块组成,且每个局部图像可视为平稳区域,保证局部图像间具有像素相关性。假设获取的局部图像为F,F集合中具有n个元素,即n个局部图像,每个局部图像的大小为u。对每个局部图像进行特定特征提取,提取关键特征,将提取的图像存储在特征空间Z内,对特征空间内的元素进行K均值聚类,从而将具备同样属性的图像特征聚类在一组中,生成训练子集[6-8]。
为保证聚类的准确性,在进行特征提取前需对获取的图像进行预处理,采用高通滤波器去除图像中的噪声干扰,从而提升对图像边缘以及模糊区域的敏感性,便于识别图形结构特征,进而提升特征提取和图像聚类的准确性[9]。获得的训练子集满足以下关系式:
(5)
式中:Dk表示训练子集集合;Qk表示在训练字典稀疏表示下的特征矩阵。
根据训练字典稀疏表示原则,特征矩阵中的每个特征点满足稀疏条件,将每个特殊点标记在所属的局部图像中,采用训练字典稀疏表示每个局部图像特征,将具备相同的图像特征的局部图像按照相似性大小进行图像整合,实现完整的医疗设备图像特征三维重构,使医疗设备三维图像具有三维属性,医疗设备三维图像特征重构过程如图2所示。

图2 医疗设备三维图像特征重构示意图Figure 2 Schematic diagram of 3D image feature reconstruction of medical equipment
2 非局部相似性压缩感知下的医学设备三维成像方法
2.1 三维成像多尺度分块的压缩感知
基于图像子块相似性,若采用N×N维的观测矩阵进行多尺度分块,不仅计算量大、计算效率低,且1.2节内容中获取的投影信息是整块的,后续成像结果的重构质量与成像分辨率会受到影响[10],因此,为保证计算效率和重构质量,以小波变换为基础对三维成像进行多尺度分块,将三维图像x划分为L层,采用相同的分解值Ω对每一层进行小波分解:
x′=Ωx
(6)
采用分块投影矩阵对小波分解的每一层进行分块投影:
yi=Φix′i
(7)
式中:yi表示小波分解第i层的投影值,对划分为L层的医疗设备三维图像进行重构,其投影yk表达为:
yk=Φix′i
(8)
此时的三维图像重构方式如图3所示。

图3 三维图像重构方式Figure 3 Three dimensional image reconstruction method
式(8)的解对应小波分解层L个不同的分块投影算子,各层的投影表示对三维图像重建质量的影响也不同,因此,不同小波分解层的采样率设置也是不同的,通常低频次分解层采用高采样率,高频次分解层采用低采样率,假设每一次的采样率为S,模拟医学设备三维成像的非局部状态,则S可表示为:
S=Wh
(9)
式中:W表示小波分解层的频子权重;h表示分解层的子带抽样率[11-12]。
分析三维成像的非局部相似的特性,根据所需的三维成像实际大小,进行三维图像重构后的图像切割,规范的切割面积为10 mm×15 mm,大小相差不能超过10 mm2,如果切割面积相差过大,影响后期医学设备三维成像的非局部相似性特征提取结果,进而影响像素间的领域结构信息采样结果,极易产生提取误差[13-15]。此时,稳定采样频率后,三维成像多尺度分块的压缩感知可表示为:
(10)
2.2 非局部相似性压缩感知下的医学设备三维成像自回归模型
布置一个3×3的方格,进行像素点的记录,用于数据分析,对各切割块的成像进行特征像素点提取,将提取后的像素位置点集成为一个模型的计算数据集合,通过线性逼近的方法完成计算,具体的重构模型如下所示:
(11)
式中:ak表示回归模型;si表示切割三维成像的各个切割子块;st表示每个三维成像切割子块的中心像素;at表示计算机部署的记录各个成像像素点的向量值;q表示数据训练逼近函数;i表示三维成像切割子块的迭代估计值。
医学设备三维成像的非局部相似性主要表现为周期性、相关性以及自相似性,在成像非局部相似性特征提取过程中,还要避免切割块的边界像素点划分问题,计算边缘的像素点权重:
(12)

医学设备生成的三维成像具有大量的干扰冗余数据,这就对于成像的非局部压缩感知方法造成线性逼近误差,为了保证成像的压缩感知效果并降低线性逼近误差,具体的相似性特征提取的计算公式:
(13)
式中:βi表示包含所有三维成像中心像素点的列向量;I表示单位矩阵;A、B表示自适应矩阵;其他未知数的意义同上。
医学设备三维成像分块采样的压缩感知结果可以作为图像非局部形似性压缩感知的基础,在一定程度上简化三维成像的非局部压缩流程,将以上的各个成像压缩流程,相互调用,生成非局部相似性压缩感知下的医学设备三维成像自回归模型,见图4。

图4 非局部相似性压缩感知下的医学设备三维成像自回归模型Figure 4 Medical equipment 3D imaging autoregressive model based on non local similarity compressed sensing
非局部相似性压缩感知下的医学设备三维成像的算法流程见图5。

图5 非局部相似性压缩感知下的医学设备三维成像的算法流程Figure 5 Algorithm flow of medical equipment 3D imaging based on non local similarity compressed sensing
(1)对医学设备三维成像的基本数据进行初始化,然后根据成像的分块采样计算公式进行成像数据的采集与预处理。
(2)通过自回归模型对采集到的数据进行重构处理,随机分割三维成像块,对处理结果进行稀疏变换和逆变换,优化排列切割的成像子块。
(3)将图像压缩的最大迭代次数与规定次数相互比较,如果前者的数值小,那么输出三维成像的非局部相似性压缩感知图像,完成一个周期的工作;如果前者大,那么从步骤(2)开始,重新进行迭代计算,直到符合要求。
3 初步实验验证及结果
为了检验本文研究方法重构效果的有效性,采用文献[1]方法和文献[2]方法作为传统的方法,与本文方法相比较,完成对比实验。
在Amazon WebServices(AWS)datasets (https://aws.amazon.com/cn/datasets/)中随机选取某家三甲医院肿瘤科的3台医疗器械在不同时间段产生的三维图像,作为实验样本,见图6。

图6 不同时间段产生的三维图像示意图Figure 6 Schematic diagram of three-dimensional images generated in different time periods
在实验开始前,准备好实验所需的仪器和数据分析仪;当3种图像重建方法的结果全部提交后,停止实验,分析实验数据。三维图像的PSNR指的是成像像素压缩感知处理过程的峰值信噪比,是目前成像压缩感知领域最具有客观性评价的一个衡量因素,以压缩感知峰值信噪比与标准值的匹配度为实验指标,当压缩感知峰值信噪比与标准值的匹配度越高,说明三维成像质量越好。得出的实验结果见表1。

表1 实验结果Table 1 Experimental results
根据表1的实验数据汇总结果可知,本文方法的图像重构效果比传统方法的图像重构效果好,且无论什么类型的三维成像,本文方法的压缩感知峰值信噪比与标准值的匹配度皆最高,说明其具有较高的重构效果,具有实际应用意义。
4 讨论与结论
(1)本文深入研究了非局部相似性压缩感知下的医学设备三维成像方法,经过医学设备三维成像的分块采样和非局部相似性压缩感知后,对医学设备三维成像分块采样结果进行分块投影,此时,不同小波分解层的采样率设置是不同的,通常低频次分解层采用高采样率,高频次分解层采用低采样率,因此,只要保证采样频率S的稳定性,就可以保证三维成像的非局部状态,压缩感知峰值信噪比得到保证。
(2)进一步完善了医疗设备三维成像模式,通过提取图像观测特征与相似性像素特征,进行特征重构,基于重构后的特征,有效解决医疗图像清晰度较低,导致应用效率较低的问题,其压缩感知峰值信噪比与标准值的匹配度最高可达99%,完成三维成像的非局部相似性压缩感知的重构。
