电驱自走式农机测试平台的设计
2021-12-17余涛刘俊杰杨存志叶岩孙先明李国林
余涛 刘俊杰 杨存志 叶岩 孙先明 李国林


摘要:为解决测试平台体积大、结构复杂的问题,设计一种轮距可调的自走式农机测试平台,利用静力学分析使平台主框架轻量化。性能试验结果表明,平台性能达到设定值,平道行驶速度5.4 km/h,搭载质量150 kg。
关键词:测试平台;自走式;设计;受力分析;轻量化
中图分类号:S220.2 文献标识码:A 文章编号:1674-1161(2021)06-0045-03
精准农业需要实时采集农作物生长状态,测量土壤、空气等环境指标。自走式农机试验测试平台可长时间在田间采集信息,替代人观测和记录。近年来,低能耗、无污染、噪声小、传动效率高已成为农机的设计方向。然而,现有的测试平台体积大,结构复杂。为此,采用锂电池和纯电动控制,设计一种轮距可调的自走式农机测试平台。该平台以400Ah三元锂电池为电源,四轮分别由4台伺服电机110M-06030C5BE驱动,搭载农机、仪器进行田間精准作业,可连续工作8 h。
1 测试平台原理与参数
1.1 工作原理
试验检测平台以锂电池为动力能源,车载计算机按规划路径选择行走速度和转弯半径,计算每个轮的对应转速,4台伺服电机110M-06030C5BE分别驱动四轮行走。同时,车载计算机依据转弯半径计算每个轮的转弯角度,由另外4台伺服电机80M-02430C5BE分别控制四轮方向,使检测平台按预定路线行驶。平台主要由主框架、伺服减速轮边电机、转向电机、轮距调节电缸、动力锂电池和导航及控制部分组成,具体如图1所示。
平台的主要特点有:由四轮独立驱动,轮毂减速,方便整体布局;提高平台的离地间隙,可以采用多种转向方式;通过8台伺服电机改变摆臂与主框架夹角,实现轮距1.00~1.95 m无级可调,增加平台的适应性。
1.2 主要技术参数
外形尺寸(工作时):2 400 mm×1 350 mm×1 750 mm;作业速度:0.3~5.4 km/h;轮距:1 000~1 950 mm;离地间隙:850 mm;平台载重:150 kg;电池容量:400 Ah。
2 测试平台关键部件设计
2.1 驱动电机匹配设计
平台在田间试验时的移动速度较慢,因此空气阻力和加速阻力可忽略,主要受到滚动阻力、坡阻力和牵引阻力,平整田间的坡阻力简化为零,具体受力情况见图2。
试验平台最大功率PT=(Ff+FT)·V。式中,Ff为滚动阻力,由平台质量220 kg和滚动阻力系数0.1计算确定为29 kg·f;FT为牵引阻力,根据牵引单犁铧耕深20 cm、土壤比阻R=0.8计算确定为320 kg·f;V为平台行驶速度,取6 km/h。
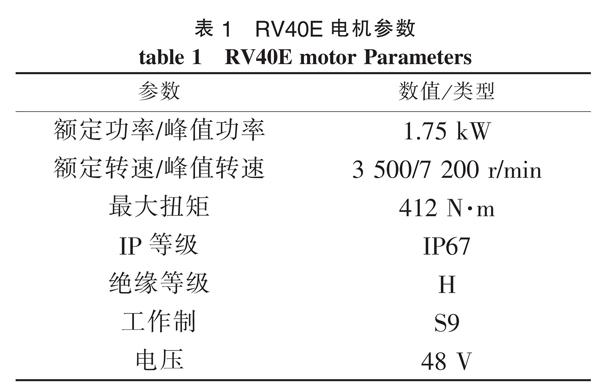
根据试验平台额定功率PN=(0.5~0.7)PT可得PN为3.65 kW。机具为四轮驱动,故单轮电机功率应≥0.9 kW,故选定驱动电机RV40E,其相关参数如表1所示。
2.2 主框架设计
主框架为矩形管60 mm×40 mm×3 mm焊合而成,使用Solidworks三维实体建模软件建模,并简化成分析模型。用Solidworks CosMos/Works分析零件的静力学性能,主框架四角加约束,下梁加200 kg法向载荷,设定网格单元48.237 mm,运算单元总数
67 846个。分析得出应力、合位移、应变的分布情况。
在认真分析合位移变形后,在合位移变形最大区域的开口处增加1竖梁,在合位移变形最小处减少4个横梁。在保证强度和刚度的前提下,主框架质量从136.5 kg减到123.8 kg,轻量化9.3%。优化后主框架开口合位移变形0.92×10-3 mm,远小于优化前的位移变形(3.37×10-3 mm),说明优化后主机架具在同样载荷下,机架强度增加,框架结构优化。合位移优化前后比较见图3.
2.3 轮距调整设计
将轮侧支撑与主框架横向连接部位设计为摆动式套接,使轮距可调,如图4所示。由电动推杆2接受控制器信号,推拉范围43~10 mm,摆臂3绕O点从A位置转动到B位置,角度摆动范围0~75 °,轮距调整从1.0~1.8 m。同时,四轮端面可反向转动,以保持互相平行,适应各种的行距和作业空间。
3 测试平台性能试验
为验证试验平台的性能指标,结合国家相关标准试验方法,搭建试验平台电驱动的控制系统。于2020年10月对额定载荷下的试验平台进行平地试验,各种工况下的实测结果如表2所示。由试验结果可以看出,试验平台的各参数均达到设计目标;平道行驶速度5.4 km/h,搭载质量150 kg。
4 结论
电驱自走式农机试验测试平台采用四轮转向控制,转向灵活多样;离地间隙大于850 mm,通过性高。该机通过调节电缸改变轮距,轮距调幅达100~1 800 mm,能够适应多种行距的作物试验。由4台伺服减速轮边电机驱动,实现电子差速和无级变速,提高行走性能和驱动力,可满足各种转向方式要求。目前,整机控制中的通用性有待模块化,需要完善相应的控制模型,提高平台功能模块的适用性和易扩展性。
参考文献
[1] 丁幼春,詹 鹏,周雅文,等.北斗定位田间信息采集平台运动控制器设计与试验[J].农业工程学报,2017,33(12):178-183.
[2] 陈黎卿,詹庆峰,王韦韦,等.纯电动试验平台电驱动系统设计与试验[J].农业机械学报,2018,49(8):388-392.
[3] 张铁民,黄 翰,黄鹏焕.电动轮式移动小车控制系统设计与试验[J].农业工程学报,2014,30(19):12-17.
[4] 张超,朱思洪,王軍洋,等.太阳能园艺拖拉机驱动系统匹配设计与性能分析[J].农业工程学报,2015,31(11):24-30.
[5] 马旭颖,张智勇,高德华,等.基于云服务架构的田间信息采集与分析系统设计[J].农业机械学报,2019,50(S1):122-127.
[6] 李玲玲,孟长伊,张磊,等.拖拉机悬挂系统田间作业信息感知技术应用研究[J].价值工程,2019,38(8):167-169.
Design of Electric Drive Self-Propelled Agricultural Machinery Testing Platform
YU Tao, LIU Junjie, YANG Cunzhi, YE Yan, SUN Xianming, LI Guolin
(Heilongjiang Institute of Agricultural Mechanical Engineering Science, Harbin 150081, China)
Abstract: In order to solve the problems of large size and complex structure of test platform, a self-propelled agricultural machinery test platform with adjustable wheel base was designed, and the main frame of the platform was lightweight by statics analysis. The performance test results show that the performance of the platform reaches the set value, the speed on flat road is 5.4km /h, and the carrying mass is 150 kg.
Key words: test platform; self-propelled; design; force analysis; light weight
收稿日期:2021-06-22
作者简介:余 涛(1968—),男,高级工程师,从事畜牧养殖机械和农机测试设备的设计研究工作。
