基于机器视觉的工业机器人分拣技术研究
2021-12-06张旭
张旭

摘要:在当前的机械化生产领域,机器视觉已经成为了大部分自动化生产的主要技术之一。因此文章建立在工业机器人分拣技术的角度,融合机器视觉打造自动化的工业生产体系。工业机器人的分拣系统构成,往往涉及到了多个核心构建以系统平台作为主要的操控中心,在分拣工作开始的过程中需要进行图像处理、信息采集、目标定位以及机械操作,能够准确的识别工件以及相关物品的类型和特征,并且预判位置和姿态,经过精准的抓取来完成分拣作业,这一技术体系能够有效增强工业生产的效率。
关键词:工业机器人;分拣;机器视觉;工件识别;定位
当前工业机器人已经广泛融入到了工业生产的多个领域,例如搬运、焊接、上下料、喷涂以及装卸等,尤其在物流领域有着较高的应用效率。综合其技术体系来看,工业机器人不仅涉及到了自动化技术,还建立在机器视觉的基础上,利用机械设备代替人眼进行判断和测量。本文建立在具体案例以及技术分析的角度,通过文献分析法以及技术分析法阐述工业机器人的具体工作流程,分析了机器视觉的实际应用价值,以期能够为当前的工业自动化发展奠定基础。
一、以机器视觉为主的工业机器人系统结构
在当前的流水线生产体系中,分拣作业是核心工序,需要将不同类型的物料或者工件分门别类的摆放到相应位置。传统的人工分拣效率较低且精准性较差,而利用智能工业机器人可以在短时间内快速的完成高质量的分拣作业。从系统结构上来讲,智能化分拣机器人的系统涉及到了视觉系统以及分拣控制系统,例如欧姆龙智能机器视觉系统 fz4便具有较高的应用价值,分拣控制系统则是建立在控制平臺的基础上,以伺服驱动器作为介质,来实现信息传导和机械操控。当前较为常见的系统结构如图1所示。
(一)工业机器人
为了进一步提升本文论述的科学性和有效性,文章建立在三菱RV-3SD工业机器人的基础上进行细节分析。该机器人的本体为六自由度垂直多关节型机器人为主,选择AC伺服控制器,还涉及到了转换器,主要负责信号的输入和输出,配备抓取机构,主要的活动半径在60厘米以上,能够完成340度左右的运转。从其功能上来讲,能够实现吸取、抓取、装配、搬运、测量、拆解等相关工业操作[1]。
(二)机器视觉系统
该机器人的智能视觉系统为欧姆龙FZ4-350,其中涵盖了视觉相机、监视器、视觉控制器等。能够结合工件本身的特点进行检测,例如形状、颜色以及关键数字等,通过前期的程序输入以及调控可以进行实时操作。机器人也可以直接与PLC自动控制系统进行对接,从而实现整体生产线的全自动管理。
(三)可编程自动控制单元
可编程自动控制单元主要指的是建立在人工操作以及自动控制的基础上打造的综合体系,例如三菱FX3UFX3U-64MT,便是当前在大部分自动化机器人以及电机等领域中,具有较大应用价值的可编程控制器,能够有效检测各个单元的信号,实现工作流程管理以及数据传输等服务。
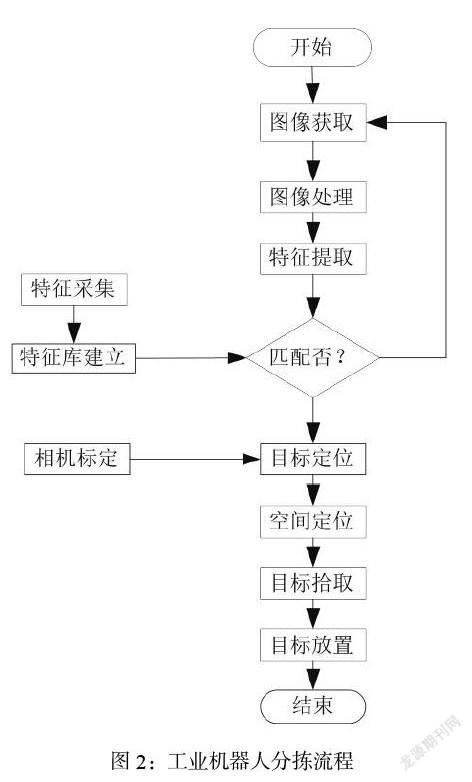
二、基于机器视觉的工业机器人分拣流程
具体的分解流程主要以定位、识别、抓取和放置这4个步骤为主。在整体系统运行过程中,首先智能机器人的摄像机会直接采取放置台上相关物件的信息,并且将其传输到PC系统内,通过识别算法进行常规的识别,能够有效识别六边形、三角形、矩形等多边形工件。在这个过程中,为了避免图像模糊导致识别失败,会提前进行图像预处理,消除噪声对影像的干扰,然后将目标图像从背景放置台中提取出来。
系统中的Hough直线检测单元,可以直接检测到工件的边条数,从而为精准抓取提供依据。结合边条数的实际情况分析具体的相邻直线夹角,并且将夹角的度数作为链码参数,然后与数据库中的模板链码以及计算机匹配出来的链码进行精确对比,得到的信息可以直接作为夹具的操控依据[2]。同时通过图像识取和特征提取之后,可以定位每一个物品的中心坐标点,然后利用RS232发送相关特征信息给控制柜,控制柜,接受信息之后经过分析,能够控制机械手进行精准的分拣和放置。详细的工作流程如图2。
三、分拣的识别及定位
针对物品进行识别和定位,能够有效提升工业机器人的分拣效果和精准性,当前大部分的定位识别技术是建立在图像匹配技术的基础上实现的。结合匹配的不同元素选择不同的分配区域来提取特征,在这个过程中,由于特征匹配不再依赖于灰度,因此该项技术在当前的工业机器人研发中具有较大的应用价值。
(一)图像识别
图像识别主要指的是结合前期输入的图像模板来选定与其相似的目标图像,同时识别图像,在整体背景中的具体位置和实际方向,这其中需要系统的模型库、图像预处理系统、图像信息获取系统、特征匹配系统共同协作,完成该步骤。定位所要找到的物品之后,需要将物品与背景对象进行分离,在这个过程中通常选择影像二指化处理将处理之后的图像通过对比和判别之后分析相似度并且检验色彩,了解图像中的文字编号。在这个过程中可以直接利用颜色灰度过滤的方式将整体图像转化为黑白图像,然后将其转化为特征图像,与前期模型库中输入的图像进行对比和搜索,从而检测匹配程度。在颜色计算的过程中,首先掌握整体物品的颜色平均值,然后分析基准颜色之间的差值,通过对比之后能够快速定位所要选择的颜色[3]。
经过这一系列操作之后,需要进行分拣的物件,已经录入到系统模型中,通过系统模型的数据传输功能与机器人的操控窗口进行对接,利用指令传输的方式控制PC系统以及可编程控制器来实现对机器人的操控,从而完成识别到分拣的流程。
(二)定位
前期的工件识别能够决定经过分拣之后搬运到哪个位置以及搬运哪一个物料,那么就需要进行精准定位。在这个过程中,往往通过拍摄的方法来计算机器人和目标物品之间的距离。首先将工件在视频图像内的实际位置转化为摄像机的坐标,然后再通过摄像机本身坐标的转换,将其设定为世界坐标,这样就可以得到机器人当前的姿态坐标。建立在机器人运动学的基础上,分析相关关节角度以及驱动角度,这样能够有效操控机器手臂前往对应位置进行抓取和放置。从具体的计算流程角度来讲,工件的定位是基于图像计算出工件的中心坐标(x,y),例如物品为圆柱型,垂直拍摄为圆面,所以仅计算出中心点位置便可以进行定位。然后利用最小平方误差法,将其进行最小化,能够得出分拣对象所在的具体坐标以及具体的旋转角度。找到中心位置之后,在定位目标物品边缘上的三个不同的点构建对比坐标系,然后利用斜率公式便可以求出夹角。
除此之外,在实际运作过程中,机器人的实际坐标可能会受到传送带传送速度以及距离等因素的影响,那么在实际进行距离测算的过程中,还需要结合传送带的速度来进行误差修补。
经过这一系列的操作,能够明确的定位抓取对象的实际位置和具体形态。结合当前的技术研发成果来看,针对不规则的物体也具备了高精度的匹配和识别方式,近似物体的区分也更加精准,能够有效提升工业机器人的操作效率。
结束语:
综上所述,为了进一步提升工业生产的效率和质量,降低人工成本,建立在机器视觉系统的基础上打造的工业机器人,能够有效完成工业分拣这一工作。工业机器人可以快速的进行目标物品的图像定位以及信息提取,计算其精准坐标,然后操控机器手臂来完成抓取和放置这一流程生产效率较高,精准性较强,同时能够有效实现大规模的分解作业,在当前的工业生产领域可以进行推广。
参考文献:
[1]焦恩璋,杜荣.工业机器人分拣技术的实现[J].组合机床与自动化加工技术,2010(2):84-87.
[2]刘振宇,李中生,赵雪,邹风山.基于机器视觉的工业机器人分拣技术研究[J].制造业自动化,2013,09(上):25-30.
[3]李婷,柳宁.基于机器视觉的圆定位技术研究[J].计算机工程与应用,2012(9):153-156.
