新型伸缩臂的设计及应用
2021-11-28吴敬民
吴敬民


摘 要:本文介绍了一种新型电动伸缩臂,其应用在喷砂机器人中,作为该机器人的上下运动轴。考虑到实际工作环境、产品性能以及成本的需要,该伸缩臂采用2级伸缩结构(共3节臂管),用伺服电机驱动,第一级伸缩采用电动缸驱动,第二级伸缩则利用钢丝绳和滑轮系统与第一级伸缩联动,以2倍于第一级的速度伸缩。从整体上看:第2节臂和第3节臂同时动作,臂管露出长度相同,运行速度快且平稳,稳定性好,径向承载力强。
关键词:伺服电动缸;伸缩臂;喷砂机器人
中图分类号:TH122文献标识码:A文章编号:1003-5168(2021)16-0057-04
Abstract: This paper introduced the application and design of a new type of electric telescopic arm. It was applied to sandblasting robots.As the up and down axis of the robot. Considering the actual working environment, performance and cost, the telescopic cylinder finally adopts a 2-stage telescopic structure (a total of 3 arm tubes), which is driven by a servo motor. The first-stage telescopic drive is driven by an electric cylinder, and the second-stage telescopic is made of a wire rope and pulley system. The stage telescopic linkage expands and contracts at a speed twice that of the first stage. As a whole, the second section arm and the third section arm simultaneously operate, the arm tube has the same exposed length, the running speed is fast and stable, the stability is good, and the radial bearing capacity is strong.
Keywords: servo electric cylinder;telescopic arm;sandblasting robot
1 新型伸縮臂的设计要求
笔者在设计一种大型7轴机器人喷砂设备时,其第3轴为垂直上下运动,需要用到伸缩臂(其核心部件为伸缩缸)。由于该机器人喷砂设备在工作参数、安装、防尘等方面具有一些特殊的要求,具体到伸缩臂也有相应的要求:①该伸缩臂要求安装距小、伸缩行程大,伸缩行程达2 500 mm,最小安装尺寸2 100 mm,最大安装尺寸4 600 mm;②要求伸缩臂只能做直线伸缩运动,不能回转;③双向作用,最大运行速度不小于20 m/min,运行平稳可靠,即走即停;④伸缩臂末端位置可实时测控,或通过计算得到;⑤伸缩臂末端行程精度满足喷砂工艺所需最低要求:末端行程精度在±5 mm以内;⑥该伸缩臂垂直安装,上下伸展和收缩,末端最大负载200 kg;⑦末端偏力矩负载,最大偏力矩为200 N·m;⑧有停车自锁功能,防止断电时下滑;⑨机构工作类型为M4;⑩要求抗粉尘污染能力强,因使用环境恶劣,高密度的粉尘,高速飞溅的沙粒,对精密件损害大,防尘要求高;?要求伸缩臂结构紧凑,横截面尺寸小于300 mm ×300 mm;?性价比高。
2 伸缩臂采用常规伸缩缸方案可能存在的问题
伸缩缸是伸缩臂的核心动力部件,为伸缩臂提供动力,常规的伸缩缸难以满足上述伸缩臂的技术要求。
第一,伸缩臂的最大安装距离大于2倍最小安装距离,单级缸已经不能满足要求,必须用二级或多级伸缩缸结构。
第二,气动缸不能满足运行平稳、即走即停的要求,不能采用。
第三,二级液压双作用缸能满足大行程要求,可双向动作,运行亦平稳,但双作用多级液压缸成本高,而且液压缸伸缩量控制较难,必须装位移传感器,安装极不方便。另外,若使用液压缸,还需要额外增加一套液压泵站、液压阀等。液压系统要在高粉尘弥漫和沙粒飞溅的环境下可靠工作,防尘密封的难度很大,成本较高,所以不宜采用。
第四,常规伺服电动缸能较好地满足测控功能,但电动缸不易做多级。
第五,无论是气动缸还是液压缸,都不能承受过大的偏力矩,需要设置导向支撑装置以防止转动,结构复杂,防尘设计难度较大。
3 解决方案
3.1 伸缩臂的结构类型选择及方案设计
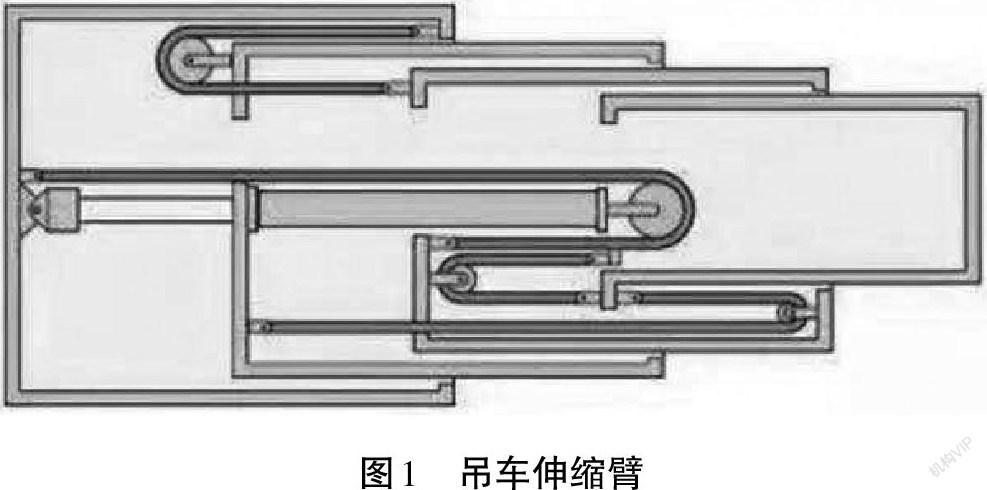
综合考虑,决定借鉴吊车伸缩臂(见图1),其伸缩量和承载力足够大,可以满足大行程和承受偏力矩的要求,并且臂管为矩形结构,也有周向定位,多方面满足负荷要求,值得借鉴。
仔细研究吊车的伸缩臂,虽然性能好,但若用在喷砂机器人上,仍存在诸多问题:内部绳排系统复杂烦琐,设计加工难度较大;节数多,截面尺寸过大,大大超过300 mm×300 mm;若用液压油缸伸缩驱动,伸缩量难以测控,需要增设位移传感器,安装比较困难;若采用绝对值伺服电机驱动的电动缸,可解决测控问题,但常规电动缸的驱动电机减速机设在缸底,电机的线缆也要伸缩,布置难度大,使用中很容易发生缠线绞断事故;无防尘措施,绳轮绳索的润滑油脂很容易沾满粉尘,影响使用寿命。
3.2 解决方案
为了解决上述问题,进行结构简化,将图1的4节臂简化为3节臂,减少一节臂管,同时减少2套绳轮绳索結构,这样截面尺寸大为减少;将液压缸置换为电动缸,用绝对值伺服电机驱动,伸缩长度末端位置实时可控;电动缸布置方向与图1相反,缸筒固定在第一节臂管上,增设一个套管,套管一端与活塞杆相连,另一端与第二节臂管相连,电机减速机布置在整个伸缩臂的臂管外部。
4 新型伸缩臂的设计
4.1 伸缩臂的结构及组成
设计的电动伸缩臂结构如图2所示。
4.2 结构安装说明以及工作原理
4.2.1 整体结构及安装说明。电动缸缸体通过柱销与第1节臂连接,电动缸活塞杆的末端连接套管,套管的另一端通过柱销Ⅱ与第2节臂相连,套管的上端设置有绳轮Ⅰ,下端设置有绳轮Ⅱ。钢丝绳Ⅰ的一端通过绳张紧装置Ⅰ连接第1节臂上固定点,另一端跨过绳轮Ⅰ连接第3节伸缩臂上固定点。而钢丝绳Ⅱ的一端通过绳张紧装置Ⅱ连接第1节臂上固定点,另一端跨过绳轮Ⅱ连接第3节伸缩臂上固定点。
4.2.2 工作原理。做提升运动时,伺服电机逆时针旋转,驱动同步带轮Ⅰ,通过同步带带动同步带轮Ⅱ,同步带轮Ⅱ驱动电动缸内丝杠旋转,从而使电动缸的活塞杆收缩,连接在活塞杆下部的套管同步收缩,以给定速度[V1]做上升运动,设置在套管上端的绳轮Ⅰ也以定速度[V1]做上升运动,在钢丝绳Ⅰ的牵引下,第3节伸缩臂将以2倍[V1]速度上升,其上升的行程为电动缸收缩行程的2倍;而下降运动时,伺服电机顺时针旋转,电动缸的活塞杆伸长,设置在套管下端的绳轮Ⅱ以给定速度[V2]做下降运动,钢丝绳Ⅱ通过固定点往下拽第3节伸缩臂,第3节伸缩臂将以2倍[V2]速度下降,其下降的行程为电动缸伸出长度的2倍。
5 设计选型及计算
5.1 电机丝杠选型及计算
本系统采用台达伺服电机,型号为:ECMA/C11020、2 kW、带刹车,采用绝对值编码器,自带电源,系统断电后,编码器不会因掉电清零而丢失位置,测控非常方便[4]。伺服电机自带16位的编码器,分辨精度达1/65 536,折合行程精度为0.12 μm。理论上精度非常高,但实际上,受丝杠、减速机、轴承等的影响,精度较低。经测量,实际精度在10 μm以内,这个精度已经远远超过喷砂作业所需。该伺服电机还带断电刹车功能,有效防止断电时机械臂因自重下坠。
具体的元件选型[5]如下。伺服电机型号为ECMA/C11020,功率为2 kW,转速为3 000/5 000 r/min,额定扭矩为6.37 N·m,最大扭矩为19.11 N·m,带刹车制动,绝对值式编码器。丝杠型号[1]为FF2520,公称直径为25 mm,公称导程为20 mm。同步轮及减速机的总传动比为5∶1。
丝杠额定提升力为:
5.2 末端负载能力计算
电动缸、套管、第二节臂总重120 kg,第三节臂总重50 kg,末端负载为:
满足末端负载要求。
5.3 提升和下降速度计算
提升和下降速度计算结果为:
满足最大运行速度要求。
5.4 钢丝绳选型计算及强度复核
钢丝绳直径计算公式为[3]:
式中:[n]为安全系数,查表M4~M5为4.5~5,取5;[K]为钢丝绳捻制折减系数,取0.82;[ω]为钢丝绳充满系数,[ω]=钢丝绳断面面积总和/钢丝绳毛断面积,取0.46;[σb]为钢丝绳的公称抗拉强度,取1 670 N/mm。
在伺服电机堵转情况下,钢丝绳理论承受的最大拉力为:
将相关数据代入式(6),得出钢丝绳最小直径[d]为7.65 mm。
实际使用中,在伺服电机不堵转的情况下,钢丝绳静拉力为第三节臂及末端负载:250×9.8=2 450 N,摩擦阻力按经验取约1 000 N,实际上钢丝绳承受的拉力值约为3 450 N,远远小于最大静拉力6 206.6 N。
钢丝绳设计及选型。为了安全起见,选钢丝绳第二组6×19(纤维芯)类规格,钢丝绳公称直径8 mm,许用应力1 670 MPa,最小破坏拉力32.8 kN。
为了防止伸缩缸在行程两端堵转输出最大拉力,损坏钢丝绳,设置了软件限位和传感器感应。在本设计中,电动缸实际行程为1 300 mm,为安全起见,通过行程开关将极限行程限位为1 270 mm,两端各留15 mm余量,再通过软件限位把有效行程限制为1 250 mm,使伸缩臂总伸缩行程为2 500 mm。全部缩回时,总长度为2 045 mm,全部伸出时,总长度4 545 mm。正常工作时,钢丝绳负载就是第三节臂重量+末端负载+摩擦阻力,不会出现电机堵转电动缸最大拉力拽钢丝绳现象。样机实验时,实际测量电机负载为额定的60%~80%。
绳径比计算:机构工作级别M4要求滑轮绳径比[h]≥18,滑轮直径150 mm,钢丝绳公称直径8 mm,150/8=18.75>18,满足最小绳径比要求。
5.5 丝杠强度校核
本设计丝杠型号为FSWE4020,公称直径为40 mm,公称导程为20 mm,额定负荷为76 244 N,额定载荷安全系数计算如下。
安全系数:
机构工作级别M4,安全系数为6,满足要求。
5.6 伸缩缸行程精度计算:
钢丝绳在拉力作用下的伸长量计算[2]:
式中:[S]为钢丝绳伸长量,mm;[L]为施加的载荷,kg;[H]为钢丝绳长度,mm;[E]为钢丝绳弹性模量,其由钢丝绳制造商提供,不能得到时可取7 000 kg/mm2;[a]为钢丝绳截面积,mm2。
在自重作用下,电机负荷较低,钢丝绳受力小且稳定,实际长度伸长量小于2.5 mm,重复定位精度更高。在喷砂作业中,伸缩缸上行和下行时,工作精度均在±2 mm以内,小于技术要求的±5 mm,满足技术要求。
6 使用效果
喷砂机器人样机实况照片如图3所示。
图中工件为挖掘机的配重壳。该设备为该型喷砂机器人的第一台试制样机,其第3轴采用本文所述的电动伸缩臂,样机使用多年,性能稳定可靠,使用方便,生产效率也很高,为公司创造了丰厚的利润。
7 结语
纵观该套伸缩臂系统,采用伺服电动缸及绳排系统,实现了小安装距大行程的设计要求,采用绝对值伺服电机驱动、测控,断电后仍可保存记忆机械臂各轴位置,安装方便,结构紧凑,抗污染强,显示了超高的性价比,达到了设计和实际使用要求。
参考文献:
[1]机械设计手册编委会.机械设计手册[M].北京:机械工业出版社,2004:12-17.
[2]颜慧珍.钢丝绳的伸长率与预张拉技术[J].金属制品,2006(5):11-13.
[3]黄大巍,李凤.现代起重运输机械[M].北京:化学工业出版社,2006:38-41.
[4]袁中凡,李彬彬,陈爽,等.机电一体化技术[M].北京:电子工业出版社,2010:64-67.
[5]李金泉,杨向东,付铁.码垛机器人机械结构与控制系统设计[M].北京:北京理工大学出版社,2011:8-22.
