芦苇笋采收机研制
2021-11-26古全元高自成向明友闵淑辉李立君
廖 凯,古全元,高自成,向明友,汤 佟,闵淑辉,李立君
芦苇笋采收机研制
廖 凯,古全元,高自成,向明友,汤 佟,闵淑辉,李立君
(中南林业科技大学机电工程学院,长沙 410004)
针对芦苇笋采摘无机械化采摘设备,人工采摘劳动强度大,作业环境泥泞,湿地行驶通过性和稳定性要求高等问题,该研究设计了一种自走式芦苇笋采收机。该机包括采摘装置、升举机构、收集装置、履带自行走底盘等部分,可实现满足农艺要求的芦苇笋自动化采摘和收集作业。整机由柴油机驱动,传动系统分为机械传动部分和液压传动部分,机械传动部分提供整机行走和收集纵向输送动力,液压传动部分提供采摘装置动力调整、横向收集调速和升举机构升降。首先,根据芦苇笋采摘掰扯受力特点设计了同步带牵引拖曳采摘装置,其俯仰角度0°~60°可调,前端最大离地高度600 mm,采收宽度876 mm;同时,根据通过性能和作业要求,采摘装置加装变幅升举机构,离地最大升举高度200 mm;之后,根据芦苇笋的生物特性设计了芦苇笋输送收集装置,纵向输送装置皮带速度为0.5m/s,横向收集装置皮带速度为1m/s;最后,基于各个模块分布和传动关系,设计了履带自行走底盘,配套动力13.3 kW。通过对整机动力和行驶性能进行分析计算,确定满负载动力需求,获得整机横、纵向极限倾角及横向滑移角。采摘试验表明,采摘机作业效果良好,采摘效率为71 kg/h,损伤率为8%,漏采率7.6%;整机行驶性能稳定,行驶速度范围为0~9 km/h,采摘装置前端离地高度调节范围为0~638 mm,可适应地势采摘芦苇笋;整机极限纵向俯角、仰角和横向倾翻角分别为50°、63°和45°,纵向极限滑移角和横向极限滑移角分别为42°和38°,湖区作业通过性和稳定性强。试验结果对自走式芦苇笋采收机的结构优化和智能化升级提供了可靠的技术支撑。
农业机械;设计;试验;自走式;芦苇笋;采收机;行驶性能
0 引 言
芦苇笋是芦苇嫩茎(芦苇芽),植物学名南荻笋,又称柴岗,芦竹族、芦竹亚科,世界各地均有生长,主要生长在灌溉沟渠旁、河堤、沼泽地等湿地或浅水中。芦苇笋采收农艺要求特殊,其苗期如同韭菜,在收获后会重新生长,采摘期在每年的3月,采摘时限仅有十几天,收获方法分为收割和掰断式采摘,由于收割破坏了根茎组织,对芦苇笋的再生长不利而很少采用,所以芦苇笋收获一直采用人工掰断采摘,采收人员的劳动强度非常大。洞庭湖区作为“芦苇之乡”,是全国4个芦苇主产区之一,年产量4.2×105t,占全国的46.36%,芦苇笋是洞庭湖区的传统天然食材,更是湖区农民增收的传统副业。采收、加工环节机械化是芦苇笋产业良性发展的必然趋势,其中芦苇笋采收是是芦苇笋产业链中最耗时费力的一个环节,因此克服湖区恶劣作业环境,实现芦苇笋机械化无损采收十分必要[1-5]。
从已有研究来看,目前国内外均无芦苇笋机械化采收技术,相关研究主要集中在芦苇笋加工制备方面。芦苇笋的外部特性与芦笋、大葱等根茎类作物相似。在芦笋采摘方面,国外已有切割式、折断式、机器视觉智能芦笋采收机[6-8],这些折断式和切割式采摘方式会损伤芦苇笋可食用部分的根茎组织,不能满足芦苇笋采摘的农艺要求。国内芦笋、大葱、萝卜等根茎类作物机械化采收基本以切割式和铲挖式为主。2011年付威等[9]研发了一种萝卜收获机,2016年王帅等[10]设计了一种白芦笋收割装置,2019年杜洪恿等[11]设计了一种切割式的芦笋收获机,2019年,王方艳等[12]设计了一种自走式大葱联合收获机,此上收获装备搭配的切割和铲挖式采收系统不能满足芦苇笋采收的农艺要求,行驶系统均不能适用于芦苇笋生长地貌环境。芦苇笋通常生长在环境复杂的湿地,常见的轮式底盘收获机械无法正常行走,而履带式底盘和船型底盘可以有效降低压强,能在湿地沼泽正常作业。采用以履带式底盘为动力的收获机,可以延长收获期,一定程度上缓解用工紧张状况,降低收获成本[13]。因此,本文根据芦苇笋采摘农艺要求及湖区复杂作业环境,设计了一种自行走式芦苇笋采收机,实现湖区行走、采摘高度调节、芦苇笋的柔性采摘及输送和收集等功能。加工样机并进行了田间试验,检验了芦苇笋采收机行驶性能、作业稳定性和采收效果。该机的研制大大降低芦苇笋采摘的人工依赖程度,提高工作效率,填补国内芦苇笋无机械化采收设备的空白。
1 整机结构及主要技术参数
1.1 设计目标
芦苇笋采用植苗种植的模式,种植密度约10株/m2,种植密度较高,株高一般为45~60 cm,可食用长度为15~20 cm(由掰断部分的端部开始计),种植地多为湿地沼泽,采收作业环境差,路面质量较差,对机具的通过性和稳定性要求较高。为解决芦苇笋自行走机械化采收系列问题,使芦苇笋采收作业过程机具行驶平稳、转弯半径小、对芦苇笋损伤程度小等,确定整机设计目标如下:①高通过性:采用履带式底盘,采摘装置高度可调,以适应不同地形、坡度、作业环境,实现平稳采收、越障、跨沟;②作业灵活性:采摘作业头可升降,适应不同高度芦苇笋植株采收要求,适应性强,底盘转弯半径小,灵活性高;③作业稳定性:履带式底盘抗倾翻、滑移能力强,动力充足,以适应湿地沼泽地的恶劣路面环境;④植株损伤率小:针对芦苇笋采后复生的特点,采用柔性采摘原理,最大限度保护植株,降低损伤率,保证芦苇笋的再生长。
1.2 整机结构与工作原理
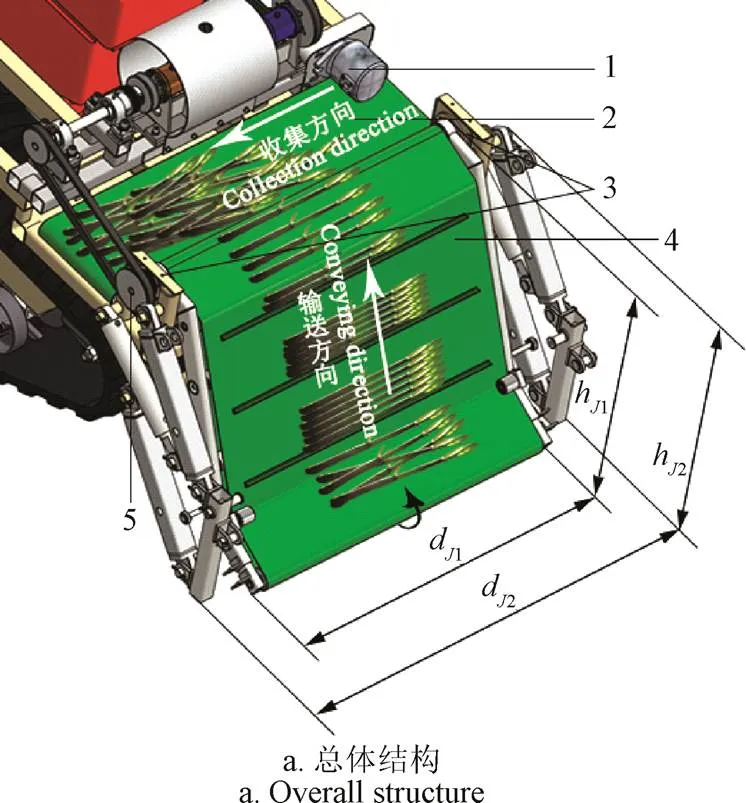
采收机整机结构如图1所示,整机由柴油发动机驱动,由柔性夹持的采摘装置1、用于调整采摘装置作业位置的平行四边形升举机构2、用于输送和收集采摘后芦苇笋的输送收集装置3、具有高通过性和机构可靠性的履带自行走底盘4组成。
采摘装置与底盘通过液压缸和销轴连接,并实现升举俯仰动作,动力由柴油机提供。底盘主要由用于输送采摘装置采摘后芦苇笋的纵向输送装置5、运输和收集芦苇笋的横向收集装置17、带有张紧机构的导向轮6、履带7、承载整车质量的承重轮8、调节纵向输送机构速度的齿轮箱9、托举皮带的托轮10、驱动轮11、液压油箱12、变速箱13、柴油发动机14、车架15以及控制纵向输送装置运行的第一离合轴系16等组成。对称布置的履带通过柴油发动机14提供动力,变速箱13进行变速调节,控制发动机速度和转向。
1.3 主要技术参数
根据设计目标确定采收机主要技术参数如表1所示。
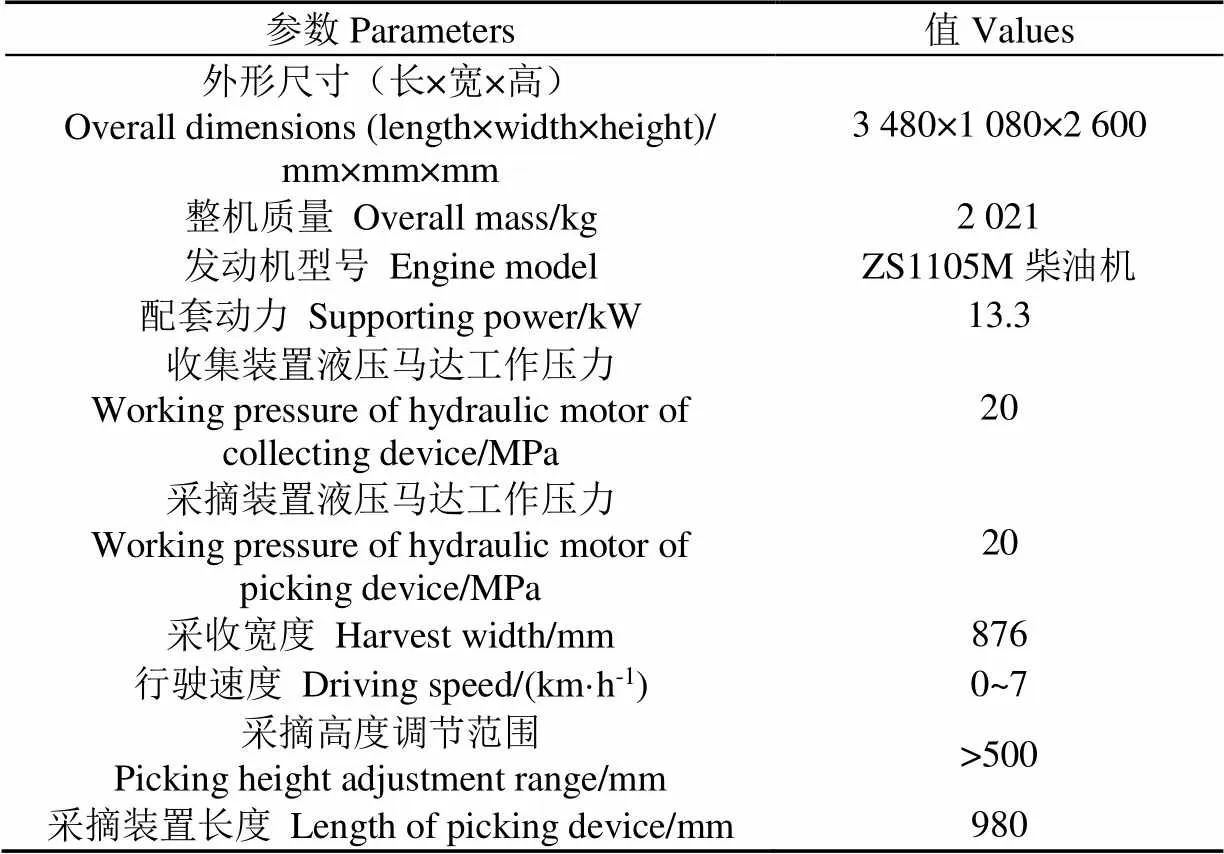
表1 主要技术参数
2 关键部件设计
2.1 采摘装置
采摘装置主要由传动机构1、液压马达2、同步带夹持采摘/避让机构3、分流板4、支撑架5组成,如图2所示。在作业过程中,芦苇笋通过分流板分别分流喂入到9对同步带夹持机构中进行采摘。根据芦苇笋株距,采摘装置宽度d设计为876 mm,即采收宽度为876 mm,采摘装置长度设计为980 mm,支撑架宽度l1设计为435 mm,同步带安装轴距l2为683 mm。
1.传动机构 2.液压马达 3.同步带夹持采摘/避让机构 4.分流板 5.支撑架
1.Transmission mechanism 2.Hydraulic motor 3.Synchronous belt clamping picking/avoiding mechanism 4.Diversion plate 5.Support frame
注:d为采摘装置宽度,mm;为采摘装置宽度,mm;l1为支撑架宽度,mm;l2为同步带安装轴距,mm。
Note:dis the width of the picking device, mm;is the width of the picking device, mm;l1is the width of the support frame, mm;l2is the timing belt wheelbase, mm.
图2 采摘装置结构示意图
Fig.2 Schematic diagram of picking device structure
芦苇笋不能切割,只能“掰扯”,否则会破坏来年生长。掰扯的力学动作通过同步带夹持采摘/避让机构牵引拖拽实现,并由具有分段张紧的带传送结构将拔断的芦苇笋沿着皮带送到后方的纵向输送装置上。作业时,采摘装置整体与地面保持一定倾角,即同步带牵引方向与地面保持一个夹角,从而使芦苇笋进入带口时有一个形成弯矩的加持牵引力,便于掰断。
2.1.1 同步带夹持/避让机构
如图3所示,一对反转的同步带通过4组张紧机构保持带与带之间5 mm的间隙,以使芦苇笋进入后不掉落。皮带厚度为5 mm,张紧机构2有保持带与带之间加持力的作用,同时,可通过上方张紧弹簧1调节夹持力,以保证芦苇笋径过大时夹持机构能够退让,防止夹伤表皮。为保证有效的皮带张紧度和夹紧力,同一夹持机构支撑架上两相邻张紧机构安装轴距l1=l3=l5设计为90 mm、l2=l4设计为190 mm。根据同步轮直径、皮带厚度和带与带之间的间隙,两相邻同步带轮安装轴距d设计为50 mm。
芦苇笋的采摘动作由同步带夹持采摘/避让机构牵引拖拽实现,同步带传动主动轴4上的一对直齿轮啮合,使得同步带以12相向运动,张紧机构2由张紧弹簧1调节,提供张紧力的同时,可以使芦苇笋两相邻同步带夹紧,适应不同株径的芦苇笋。同步带运动提供牵引拉力,使芦苇笋从根茎处掰断。
1.张紧弹簧 2.张紧机构 3.夹持机构支撑架 4.同步带传动主动轴 5.直齿轮 6.同步轮 7.同步带
1.Tension spring 2.Tension mechanism 3.Clamping mechanism support frame 4.Synchronous belt driving axle 5.Spur gear 6.Synchronous wheel 7.Synchronous belt
注:d为两相邻同步带轮安装轴距,mm;l1~l5为同一夹持机构支撑架上两相邻张紧机构安装轴距,mm;1、2为两相邻同步带的转动方向,rad·s-1。
Note:dis the installation wheelbase of two adjacent synchronous pulleys, mm;l1-l5are the installation wheelbases of two adjacent tensioning mechanisms on the same clamping mechanism support frame, mm;1and2are the rotation directions of two adjacent timing belts, m·s-1.
图3 同步带夹持机构示意图
Fig.3 Schematic diagram of synchronous belt clamping mechanism
为保证采收机有效采摘,芦苇笋的喂入后同步带夹持拖拽速度(水平方向速度)要快于整机作业速度,对同步带的速度分析如图4所示。
采摘装置由俯仰升举机构进行皮带倾角α的调整,设计调整范围为0°~60°,两同步带安装宽度B设计为57 mm,单根同步带宽度B2为25 mm,同步带与夹持机构支撑架安装距离B1设计为51 mm,同步带单侧皮带长度l设计为720 mm,v为芦苇笋采收机行进速度,v为同步带速度,且满足:
由式(1)可知,同步带速度与采收机行进速度v、采摘装置倾角α、相对速度系数K有关。初步设计采收机作业速度v=1 km/h,设计传送带速度水平方向速度为芦苇笋采收机行进速度的1.5倍,即K=1.5,根据v的取值范围,选取排量为5.1 mL/r,压力为20 MPa的GM5-8型液压马达。
注:v为整机行进速度,m·s-1;α为采摘装置倾角,(°);B为双条同步带安装宽度,mm;B1为皮带与夹持机构支撑架安装距离,mm;B2为单条同步带宽度,mm;l为单侧皮带长度,mm。
Note:vis the traveling speed of the whole machine, m·s-1;αis the inclination angle of the picking device, (°);Bis the installation width of the double synchronous belt, mm;B1is the installation distance between the belt and the support frame of the clamping mechanism, mm;B2is the single synchronization belt width, mm;lis the length of one side belt, mm.
图4 同步带速度分析
Fig.4 Synchronization belt speed analysis
2.1.2 传动系统
采摘装置的动力由安装在支撑架上的液压马达提供,动力输出轴4输出扭矩,驱动左右共9组直齿轮,多个直齿轮并排设置且依次啮合,多组同步带夹持机构同步运转,相邻同步带反转。动力输出轴与同步带传动主动轴间的安装轴距a设计为50 mm,两同步带传动主动轴间的安装轴距b设计为50 mm,同步带传动主动轴长度h设计为180 mm,同步轮直径Φ设计为32 mm。由式(1)可知,采收机作业速度v=1 km/h时,采摘装置倾角α调整范围为0°~60°,计算得皮带线速度范围为1.5~3 m/s,可实现采摘机多道次宽幅采收,其传动系统如图5示。
1.液压马达 2.同步轮 3.同步带传动主动轴 4.动力输出轴 5.直齿轮
1.Hydraulic motor 2.Synchronous wheel 3.Synchronous belt drive driving shaft 4.Power output shaft 5.Spur gear
注:Φ为同步轮直径,mm;a为动力输出轴与同步带传动主动轴安装轴距,mm;b为从动轴间安装轴距,mm;h为从动轴长度,mm。
Note: Φis the diameter of the synchronous wheel, mm;ais the installation wheelbase of the power output shaft and the driving shaft of the synchronous belt drive, mm;bis the installation wheelbase between the driven shaft, mm;his the length of the driven shaft, mm.
图5 传动系统
Fig.5 Transmission system
2.2 升举机构
为保证采收作业中采摘头作业高度和俯仰角度可调,提高采摘适应性和通过性,采收机设有平行四边形升举机构。其升降由两侧对称分布的液压缸驱动,采摘装置连接在平行四边形升举机构上,由2个对称分布的油缸控制其俯仰角度,并且升举机构在升举过程中可同步调整纵向输送机构,实现同步变幅,以满足采摘装置不同姿态的输送要求。升举机构及安装示意图如图6所示。由于升举机构连接的采摘装置为对称机构,两侧俯仰油缸和升降油缸的承载分别相同,经分析当液压缸收缩到极限位置时其所受承载力最大,由Inventor中iProperty确定结构重心位置,对升举机构简化后进行受力分析结构如图7所示。
由于升举机构连接的采摘装置为对称机构,两侧俯仰油缸和升降油缸的承载相同,经分析当液压缸收缩到极限位置时其所受承载力最大,由Inventor中iProperty确定结构重心位置,以采摘装置和升举机构作为整体,简化结构后进行受力分析。
根据图7确定单个升举机构的液压缸承载力F1为
单个升举液压缸内径1(mm)为
式中η1为升举油缸工作效率;1为液压马达进出口压力差,本文1=16 MPa[36]。
由Inventor中iProperty确定采摘装置和平行四边形升举机构的总重力G为1 136.8 N,设η1=0.95,将上述数据代入式(2)~(4)中,得1=33.4 mm,圆整后升举机构油缸内缸径设计为40 mm,最大行程100 mm,安装距离为255+100=355 (mm),经分析,该油缸满足安装采摘装置和纵向输送系统后的升降工作要求。
单个俯仰液压缸的承载力F1可由下式计算:
单个俯仰液压缸内径2(mm)为:
式中η1为俯仰油缸工作效率。
由Inventor中iProperty可知G为940.8 N,设η1=0.95,将上述数据代入式(5)~(7)中,得2=31 mm,圆整后俯仰油缸内缸径设计为40 mm,最大行程70 mm,安装距离255+70=325 (mm)。根据升举、俯仰两级液压缸最大行程和安装距离,组合调节下,采摘装置前端最大离地高度可达600 mm,满足采摘和行驶过程的高度调节需求,提高了采收机行驶和采摘的地形适应性。
2.3 输送收集装置
输送收集装置主要由纵向输送装置、横向收集装置、动力输入轮、液压马达、安装支座等组成,如图8a所示。横向收集装置安装在车架前端悬臂梁处,纵向输送机构安装在车架前端安装支座上。芦苇笋由采摘装置的同步带输送到后端,自动掉落到纵向输送装置上并向上输送,输送到顶端后掉落在横向收集装置上,由横向收集装置集中输送到末端,末端挂有收集袋。升举机构安装在车架上,宽度d2为1 064 mm,为使纵向输送机构能在升举机构内部自由移动,其宽度d1设计为850 mm。
2.3.1 纵向输送装置
纵向输送装置结构如图8b所示,动力由主动轴辊输入,带动皮带运转输送芦苇笋。侧边支架设计为S形,末端设有张紧装置,4个压轮将皮带压紧到轴辊上,以增大摩擦力,防止皮带打滑。两侧的支撑轮可在升举机构支架上做相对运动。当升举机构运动时,纵向输送机构关联随动,以适应不同采摘高度下的输送工作。输送皮带采用挡板输送带,可减少输送过程中芦苇笋的滑落。根据芦苇笋生长高度和预试验,纵向输送装置输送带的速度v初步设计为0.5 m/s,主动轴辊和相邻无动力托辊的安装间距l1设计为125 mm,无动力托辊和铰链轴之间的安装距离l2和l4设计为150 mm,两铰链轴之间的安装距离l3设计为220 mm,安装在张紧装置上的无动力托辊和相邻无动力托辊之间的距离l5根据调整张紧装置来变换,输送带宽度d设计为790 mm。
1.液压马达 2.收集装置 3.安装支座 4.纵向输送装置 5.动力输入轮 6.主动轴辊 7.无动力托辊 8.挡板皮带 9.侧边支架 10.压轮 11.张紧装置 12.支撑轮 13.铰链轴 14.传动齿轮箱 15.主动轴 16.皮带 17.横向收集张紧装置 18.从动轴 19.安装支架 20.液压马达
1.Hydraulic motor 2.Collecting device 3.Mounting support 4.Longitudinal conveying device 5.Power input wheel 6.Active axle roller 7.Unpowered idler 8.Baffle belt 9.Side bracket 10.Pressure roller 11.Tension device 12.Support wheel 13.Hinge shaft 14.Transmission gear box 15.Driving shaft 16.Belt 17. Lateral collection tensioning device 18.Driven shaft 19.Mounting bracket 20.Hydraulic motor
注:d1为纵向输送装置宽度,mm;d2为升举机构宽度,mm;h1为液压缸内收极限位置的纵向输送机构高度,mm;h2为液压缸内收极限位置的升举机构高度,mm。v为纵向输送带的速度,m·s-1;l1为主动轴辊和相邻无动力托辊的安装间距,mm;l2和l4为无动力托辊和铰链轴之间的安装距离,mm;l3为两铰链轴之间的安装距离,mm;l5为两无动力托辊之间的安装距离,mm;d为输送带的宽度,mm。v为横向输送带的速度,m·s-1;l为主动轴从动轴之间的安装间距,mm;d为输送皮带的宽度,mm。
Note:d1is the width of the longitudinal conveying device, mm;d2is the width of the lifting mechanism, mm;h1is the height of the longitudinal conveying mechanism at the limit position of the hydraulic cylinder, in mm;h2is the height of the lifting mechanism at the limit position of the hydraulic cylinder, in mm.vis the speed of the longitudinal conveyor belt, m·s-1.l1is the installation distance between the driving shaft roller and the adjacent unpowered roller,l2andl4are the installation distances between the unpowered roller and the hinge shaft,l3is the installation distance between the two powered hinge shafts, andl5is the installation distance between the two hinge shafts. The installation distance between the unpowered roller on the device and the adjacent unpowered roller,dis the width of the conveyor belts. The above units are all mm.vis the speed of the lateral conveyor belt, m·s-1.lis the installation distance between the driving shaft and the driven shaft, mm.dis the width of the conveyor belt, mm.
图8 输送收集装置
Fig.8 Conveying and collecting device
2.3.2 横向收集装置
横向收集装置如图8c所示,动力由液压马达提供,经过传动齿轮箱将动力传递到主动轴,带动皮带运转。根据纵向输送装置的芦苇笋运输量(以堆积密度计),初步设计横向收集装置的输送带速度v为1 m/s,横向收集装置的输送带宽度d为250 mm,根据车架宽度,横向收集装置的主动轴和从动轴张紧后的距离设计为900 mm。根据上述设计参数,初步确定驱动系统工作压力为20 MPa,液压马达排量按公式(8)[14]计算。
式中为横向收集装置的最大扭矩,N·m;1为液压马达的工作压力,MPa;2为液压马达的回路背压,MPa,为提高输送带运动平稳性,取2=1 MPa[15];η为液压马达的机械效率,η=0.9。
经计算可得液压马达的排量为3 L/r,结合目前的液压马达产品,选取1QJM32-3.2型马达,排量3.2 L/r,转速范围1~125 r/min。
2.4 自行走底盘
针对湖区芦苇笋采收作业环境,自行走底盘应具有高通过性和稳定性。按照模块化设计理念,自行走底盘主要配置行走系统、动力系统、传动系统、前置式采摘装置、升举机构、收集装置等。底盘采用倒梯形布局[16],主要包括驱动轮、拖带轮、支重轮、导向轮、张紧装置等,采用柴油机驱动,通过差动变速器和2个传动轴系将动力分配至底盘、采摘装置和输送机构。传动方式分为机械传动和液压传动的2种。
2.4.1 车架
车架是连接升举机构、输送机构、采摘执机构和履带行走机构以及承载发动机、油箱、变速箱、轴系载荷的核心组件,是主要受力基体。采摘装置的安装为前置式,悬臂结构使得车架前部连接处受力较大,载重分配不合理会严重影响使用寿命和稳定性[17-20],综合考虑各个模块布置、工作环境和经济实用性,车架主体选用Q235钢管焊接而成,车架结构如图9所示,车架型材规格如表2所示。
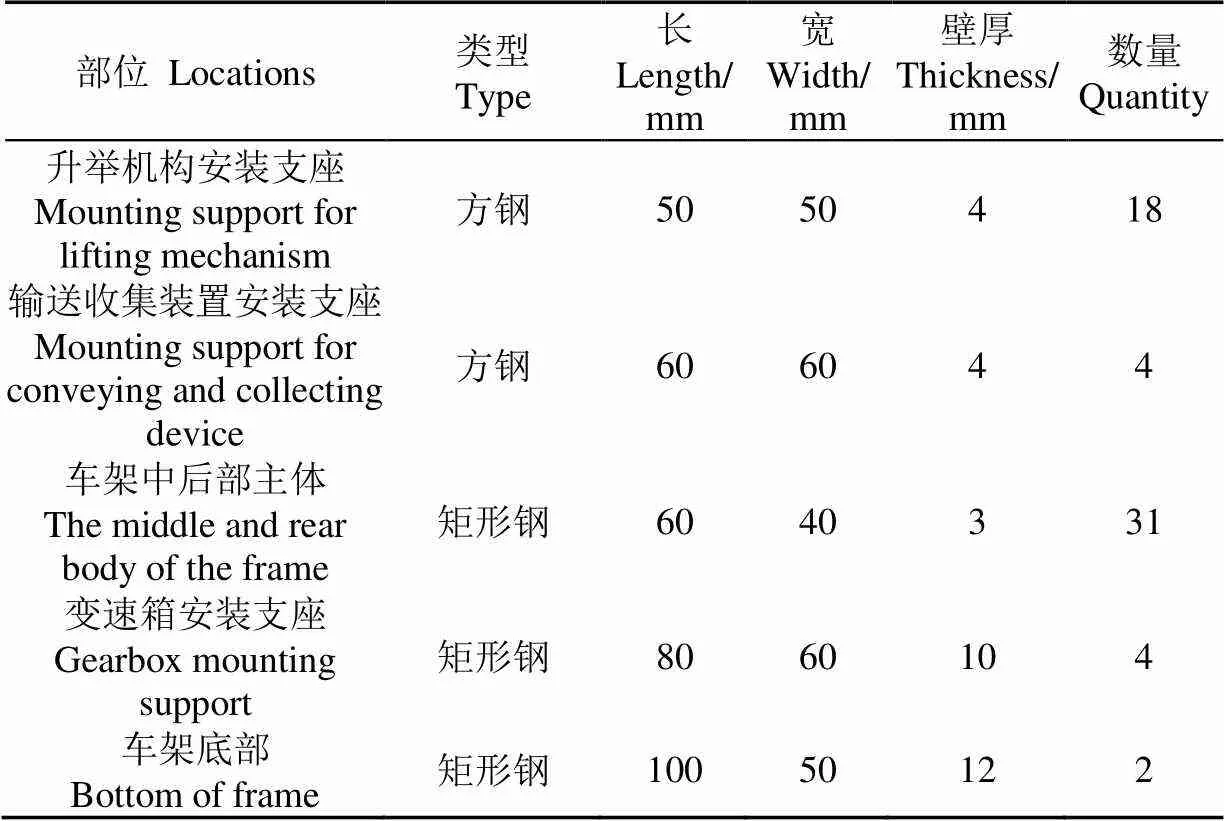
表2 车架型材规格
车架前端两侧连接升举机构,高度1设计为396 mm,钻有4个升举机构安装孔,同侧安装孔轴距2设计为250 mm。设计车架总长3为2 160 mm,车架总宽5为940 mm。车架安装行走系统后,要满足履带与车架不发生干涉,车架中部高度4设计为452 mm。横向收集装置安装在车架前端,考虑到纵向输送装置占用车架前端一部分空间,横向收集装置安装宽度6设计为470 mm。
车架前端为采摘装置和输送收集装置的连接载体,车架中部为发动机以及传动系统模块安装载体,车架尾部为整机变速箱、液压油箱等液压元件的安装载体,液压油箱后置,在不加配重块的前提下解决了整机载重分配平衡问题。总动力由柴油机提供,第一轴系将动力传递给输送收集装置,第二轴系将动力传递给液压系统,液压系统将动力传递给采摘装置和升举机构,采收机行进速度与采摘装置同步轮转速成正相关,可适应不同速度下的芦苇笋采收。机械传动部分提供整机行走和收集纵向输送动力,液压传动部分提供采摘装置动力调整、横向收集调速和升举机构升降。整机模块分配和动力传递关系如图10所示。
2.4.2 履带
芦苇笋采收机需在湖区湿软土地平稳行驶,履带式行走装置比轮式行走装置具备更好的牵引性能、接地比压、通过性以及稳定性,自行走底盘采用全履带式行走装置设计[21-22]。橡胶履带可在采摘作业过程中避免破坏或少破坏土壤和采摘后的芦苇笋茬,不影响芦苇笋采后再生长;同时橡胶履带具有吸振作用,可减轻芦苇笋采收机的振动,提高整机使用寿命。
橡胶履带的基本参数为履带带宽b、有效接地长度L、接地比压和宽度与长度比,其中履带支撑板长度与履带带宽直接影响行走装置的牵引附着性能[22]。
根据文献[23],相关参数应满足以下要求:
1)履带有效接地长度L:
式中λ为比例系数,普通机械取0.18~0.22,沼泽用途机械取0.24~0.28[24]。
2)接地压比:
式中为整机重力,N。
3)履带宽度与长度比:
根据文献[25]本文取履带宽度与长度比为0.25。
2.4.3 轮系设计
1)驱动轮
芦苇笋采收机由柴油机提供动力,动力由变速箱传递到驱动轮,实现行进和转向。根据JB/T6682-2008《联合收割机橡胶履带系列参数》[26],选取驱动轮齿数=8,其他驱动轮参数如下:
节线基准圆直径0/π≈233 mm (12)
驱动轮根圆直径D=D0−20≈206 mm (13)
驱动轮顶圆直径D=D0+2≈252 mm (14)
式中0为履带内传动平面距钢丝绳中心平面的距离,mm;为履带节距,=60 mm;为履带宽度,=14 mm。
2)导向轮
导向轮与张紧装置连接,作用是引导履带正确绕动,并张紧履带和吸振缓冲。张紧装置的张紧力一般为整机重力的60%~90%,根据经验公式[27-28]计算导向轮直径为
D=0.90=210 mm (15)
3)承重轮
承重轮与车架刚性采用刚性悬架连接。每边履带承重轮为6个,间距为40 mm,根据经验公式[27-28]计算承重轮直径:
D=2.5(16)
式中为履带节距,mm,根据结构要求取=60 mm。
4)托轮
托轮装在履带上段的下方,用于减少履带下垂量,其直径可略小于承重轮,本文选用托轮直径D= 140 mm。
3 行驶性能分析
3.1 动力性能
1)整机功率
采收机所需功率与田间土壤、地形、行走速度、植株类型有关,因此,功率计算要充分估计到负荷最大的情况,以所需功率的最大值作为采收机动力选择的依据。整机的功率P(kW)可按下式计算:
式中P为采摘装置所需功率,kW;P为升举机构所需功率,kW;P为输送机构所需功率,kW;P为行走机构所需功率,kW。
2)采摘装置功率
采摘装置由液压马达驱动,动力来源为采收机所配备的ZS1105M柴油机。各对同步带相向旋转,夹持芦苇笋后,将芦苇笋向后拖拽拔出并向后输送,一对同步带可同时夹持采收多根芦苇笋,根据芦苇笋田的植株密度,在采收过程中由分流板分流芦苇笋,1组同步带夹持/避让机构同时喂入2~3株芦苇笋,共有9组同步带,则采摘装置同时采摘的芦苇笋株数n(株)约为27株,采摘装置采摘所需功率P(kW)可用下式计算:
式中为F为掰断单根芦苇笋所需作用力,N,由试验测得F约为25 N;η为采摘装置传动效率,该系统为齿轮皮带传动系统,根据《机械设计手册》[29],η=0.9。
3)升举机构功率
升举机构是调节采摘姿态的关键部件。通过2.2节分析可知,升举机构功率P(kW)由采摘装置俯仰功率和升降功率组成,可用下式计算:
式中P1为采摘装置升举机构所需功率,kW;P2为采摘装置俯仰所需功率kW;V1为采摘装置升降速度,m/s;V2为采摘装置俯仰速度,m/s;η为采摘装置液压升降效率;η为采摘装置液压俯仰效率,η、η均为液压传动效率,η=η=0.5[29-30]。
4)输送收集装置所需功率
输送收集装置包括纵向输送机构和横向收集装置,传动方式为皮带传动,动力来源为采收机所搭载的ZS1105M柴油发动机。输送收集装置所需功率P(kW)与传动滚筒圆周力有关,功率可由下式计算[31]:
传动滚筒圆周力F(N):
式中F为主要阻力,N;F为提升阻力,N;F1为皮带急停时承载物产生的惯性力,N。
试验中发现单位时间内皮带输送的芦苇笋总质量轻,因此,F1不予考虑,主要阻力F(N)、提升阻力F(N)为
式中为附加阻力系数,取=2.1[31];f为模拟摩擦因数,对于制造安装良好的输送机取f=0.022~0.03,带挡板的带式输送装置建议取0.03;为重力加速度,=9.8 m/s2;L为输送距离,m;q和q分别为上、下托辊转动部分质量,kg/m;q和q分别为输送带每米质量和每米物料质量,kg/m;为输送带倾角,(°)。
由此确定驱动功率P(kW)和输送收集装置所需功率P(kW)为
式中v为输送带速度,m/s;η为输送收集装置传动效率;P1、P2分别为纵向输送装置所需功率和横向收集装置所需功率。
5)自行走底盘功率
自行走底盘所需功率P与芦苇笋采收机前进速度、整机质量以及土壤状况有关,可用下式计算:
式中为芦苇笋采收机整机质量,;max为芦苇笋采收机最大行驶速度,m/s;为滚动阻力系数;η为自行走底盘的传动效率系数,取η=0.9[29,32]。
由主要设计参数可知,作业时采摘装置升降速度V1=1 m/s,采摘装置俯仰速度V2=1.5 m/s,作业速度V=1 km/h,最大行驶速度max为7 km/h,输送长度为=1 m,采收作业状态下输送带倾角为60°,通过Inventor软件可知整机质量=2 021 kg。橡胶履带在湿软土地上行驶时滚动阻力系数=0.3[33],将上述参数代入式(17)~(21),得P=1 kW,P=1.6 kW,P=0.5 kW,P=4.9 kW,P=7 kW。
综上,确定芦苇笋采收机动力可用ZS1105M柴油机。其主要技术参数:转速2 200 r/m;额定输出功率12.1 kW,最大输出功率13.3 kW;排量0.996 L;最大扭矩≥64 N·m;最大扭矩点转速≤1 760 r/m;怠速800 r/min;净质量155 kg。
3.2 行驶通过性
行驶通过性是指采收机整机在行驶至作业区域及作业过程中不发生翻倾和横向滑移而保持正常工作的性能,是表征整机能否正常作业以及能否安全行驶的一个重要指标[34-35]。机器作业过程中主要行驶姿态分为纵向下坡、上坡以及横向斜坡行驶姿态,存在倾翻和滑移等行驶不稳定情况。为解决采收机作业及行驶过程中行驶稳定性的问题,结合农用拖拉机通过稳定性设计的主要参数指标,对整机行驶通过性进行分析。
3.2.1 纵向稳定性分析
对芦苇笋采收机整机在水平方向进行受力分析,质心位置固定不变时,芦苇笋采收机的纵向极限倾翻角以及滑移角可由下式计算[36]:
芦苇笋采收机纵向极限俯角α:
芦苇笋采收机纵向极限仰角′:
芦苇笋采收机纵向滑移角α:
式中0为履带接地长度,m;为采摘机质心至驱动轮轴心距离,m;为质心离地面高度,m;L为履带后接地点距离驱动轮轴线距离,m;为底盘附着系数。
质心位置与整机配重有关,通过Inventor对芦苇笋采收机进行整机三维建模,通过重心分析得出重心位置,对整机进纵向受力分析,根据式(24)和(25)计算得芦苇笋采收极限俯角为48.5,极限仰角为61。
根据文献[37],芦苇笋种植地路面附着系数为0.7,由公式(26)得出芦苇笋采收机极限纵向滑移角为40°。
3.2.2 横向稳定性能力分析
当行驶路面为侧方斜坡时,车身会横向倾斜,此时可能会失去稳定性,发生横向倾翻或侧滑。整机在侧方斜坡上的受力分析如图11所示,在侧方斜坡坡面上行驶时,两履带与地面的支撑点分别为1和2,地面作用在履带上的法向支撑力为F1和F2,在此行驶状态下若刚好整机发生横向倾翻,根据力矩平衡方程可得:
不发生倾翻的条件为F2≥0,即

由式(27)~(28)可得整机横向极限倾翻角为
在横向斜坡行驶时,除倾翻外还可能发生横向滑移,当两履带处侧滑移阻力F2和F2不足以对抗重力在斜坡上的分力时,采收机发生横向滑移,据此可建立力学方程
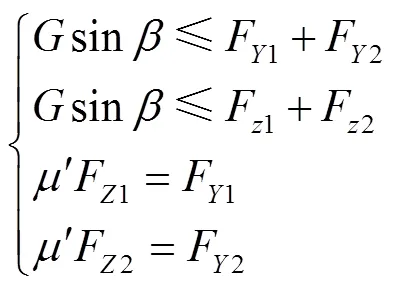
式中′为静摩擦系数。
由上式可得芦苇笋采收机极限横向滑移角为
横向极限倾翻角的大小与整机质心离地面高度以及质心与倾翻侧行走履带距1有关,由受力分析及Inventor的重心分析模块可知=314 mm,1=282 mm。在式(29)中代入相关参数求得采收机横向极限倾翻角为41.9。由式(31)可知,采收机横向滑移角′与地面静摩擦系数′有关,根据不同地面条件下的摩擦系数[38],计算不同极限横向滑移角,结果如表3所示。
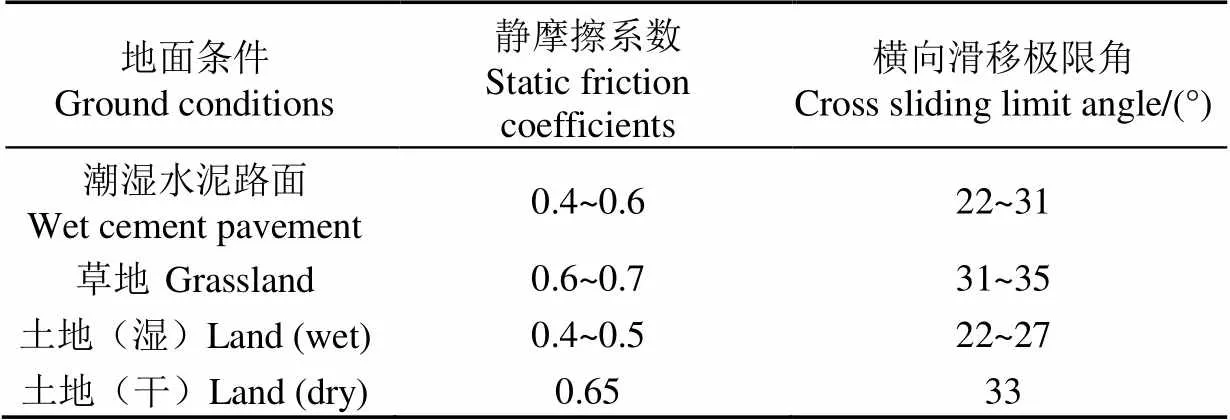
表3 不同路面整机产生横向滑移极限角
4 样机试验
4.1 试验条件
为检验芦苇笋采收机行驶性能、作业稳定性和采收效果,于2021年3月10-20日在益阳南洞庭湖自然保护区(沅江)芦苇原材料基地进行样机试验。在前往作业田地的道路行驶过程中进行行驶性能及通过稳定性的试验。到达作业区后选取一块植株密度约7株/m2、植株高度为0.4~0.6 m的芦苇笋田,环境温度为8°~16°,泥土地面,不平整,路面高低起伏不超过250 mm,坑深不超过300 mm,试验现场如图12所示。
4.2 试验方法
参照GB/T5667-2008《农业机械生产试验方法》[39]设计试验,具体测试方法如下:
1)采收试验:以采收效率、损伤率以及漏采率衡量采收效果。采收效率是单位时间采收根茎内部无破损的芦苇笋质量,试验中记录1 h内采收质量,去除污泥和其他杂枝乱叶,以采收芦苇笋净质量计算采收效率;选择200 m2的采摘区域,标记采摘前该区域的芦苇笋并统计株数,检验采摘后该区域标记芦苇笋损伤株数,用单位面积内芦苇笋总株数与损伤株数计算损伤率;采收机作业区域内遗留未采收芦苇笋视为漏采,选取200 m2的芦苇笋采收区域,记录区域内所有芦苇笋株数和采摘后漏采株数,分别进行4次试验取平均值。
2)升举机构性能(行驶和采收高度的适应性):升降和俯仰机构调整采摘装置离地面高度,调整完毕后进行行驶和采收,测试芦苇笋采收机的通过性能和采收高度适应性。
3)动力性能(采摘、输送收集以及行驶速度):采收机共有4个档位,分别为高速挡(0~2 km/h)、中速挡(3~5 km/h)、低速挡(6~7 km/h)和倒车档,将档位分别置于低速挡和高速档,在非作业和作业环境下,采用定距秒表计时法进行采收以及行驶速度测试,并观察采摘、输送收集稳定性以及是否满足动力要求。
4)行驶通过性能(抗横纵向滑移和倾翻的能力稳定性):在试验现场选取泥泞路面、湿地、芦苇田分别进行行驶通过性测试,如图13所示,试验水坑长1 000 mm,宽600 mm,水深120 mm;现场取约30°~60°坡面以1 km/h的速度进行抗横、纵向滑移和倾翻能力测试。
4.3 结果与分析
试验结果如表4所示。试验结果表明:芦苇笋采收机采收效率较高,采收损伤率和漏采率较低,采收效果良好。整机在最低档位和最高档位行驶速度在0~9 km/h之间,整机结构合理,设计稳定可靠,采收稳定,动力性能优越;采摘装置前端可调节的最大离地高度为638 mm;横、纵向极限倾翻和滑移角满足芦苇笋采收机的通过性能要求。整机通过性和稳定性满足湖区作业要求。在试验中对采摘装置的俯仰功能进行了局部改进,双侧增加了滑移板,使其能自适应地形,提高了行驶通过性能和采收稳定性。

表4 样机性能试验结果
5 结 论
1)本文设计了能够满足湖区芦苇笋采收的高通过性自行走芦苇笋采收机,填补了芦苇笋机械化采收装备的空白,对后续芦苇笋机械化采收装备的优化改进和完善提供技术支持,为芦苇笋产业向规模化、集约化、智能化发展提供装备条件。
2)同步带牵引拖曳和正交带式输送实现了芦苇笋机械化采收,同时,行走底盘模块化配置和设计,满足了作业和行走工作要求,整机动力性和通过性良好。
3)田间试验结果表明:芦苇笋采收机采收效率71 kg/h,损伤率8%,漏采率7.6%,满足湖区芦苇笋采收的要求。整机行驶速度为0~9 km/h,动力性能充足;采摘装置前端离地高度范围为0~638 mm,采收宽度876 mm;极限纵向俯角、仰角和横向倾翻角分别为50°、63°和45°,纵向极限滑移角和横向极限滑移角分别为42°和38°,满足作业过程越障过梗、涉水过渠及通过性能和稳定性要求,各项性能均达到预期要求。
[1] 任晨阳. 沅江芦笋[J]. 湖南农业,2017(12):26.
[2] 严森,凌其聪,鲍征宇. 微波消解-火焰原子吸收光谱法测定芦苇笋中的镉[J].环境监测管理与技术,2006(1):25-26.
Yan Sen, Ling Qicong, Bao Zhengyu. Determination of cadmium in common reed by microwave digestion and FAAS[J]. Environmental Monitoring Management and Technology, 2006(1): 25-26. (in Chinese with English abstract)
[3] 罗健夫. 芦菇吹响芦苇产业转型号角[J]. 林业与生态,2020(9):33-34.
[4] 万献军. 南洞庭湖区芦苇综合利用研究浅探[J]. 农业技术与装备,2019(8):87-88.
Wan Xianjun. Study on the comprehensive utilization of reed in the south aongting lake area[J]. Agricultural Technology and Equipment, 2019(8): 87-88. (in Chinese with English abstract)
[5] 李怀平. 一种芦苇笋的制备方法:CN104381929A[P]. 2015-03-04.
[6] Kepner R A. Harvester for green asparagus-successful mechanical harvester field tested during 1952 season uses principle of set-level cutting[J]. California Agriculture, 1952, 6(10): 7-9.
[7] Naoki I, Nobuyosh J, Takao H, et al. Development of asparagus harvester coordinated with 3-D vision sensor[J]. Journal of Tobotics and mechatronics, 2009, 21(5): 583-589.
[8] Peebles M, Lim SH, Duke M, et al. Investigation of optimal network architecture for asparagus spear detection in robotic harvesting[J]. IFAC Papers Online. 2019, 52(30): 283-287.
[9] 付威,陈海涛,坎杂. 萝卜收获机振动松土铲参数的优化[J]. 农业工程学报,2011,27(11):46-50.
Fu Wei, Chen Haitao, Kan Za. Optimizing parameters on vibration breakshovel of radish harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Translations of the CSAE), 2011, 27(11): 46-50. (in Chinese with English abstract)
[10] 王帅,刘维伟,李炜炜,等. 一种白芦笋收获装置:CN106612923B[P]. 2019-06-14.
[11] 杜洪恿,张国海,蒋平,等. 一种智能芦笋收获机:CN111066471A[P]. 2020-04-28.
[12] 王方艳,孙光全,尚书旗. 4 CL-1型自走式大葱联合收获机的研制[J]. 农业工程学报,2019,35(24):39-47.
Wang Fangyan, Sun Guangquan, Shang Shuqi. Development of 4CL-1 self-propelled combine harvester for green onion[J]. Transactions of the Chinese Society of Agricultural Engineering (Translations of the CSAE), 2019, 35(24): 39-47. (in Chinese with English abstract)
[13] 陈明江,郭卫,曲浩丽,等. 我国芦苇收获装备现状与发展建议[J]. 中国农机化学报,2013,34(4):29-31,41.
Chen Mingjiang, Guo Wei, Qu Haoli, et al. Current status and development suggestions for reed harvesting equipment in my country[J]. Chinese Journal of Agricultural Machinery Chemistry, 2013, 34(4): 29-31, 41. (in Chinese with English abstract)
[14] 王浏洁. 带式输送机液压驱动系统的设计[J]. 机械管理开发,2021,36(1):35-37.
Wang Liujie. Design of hydraulic drive system of belt conveyor[J]. Machinery Management Development, 2021, 36(1): 35-37. (in Chinese with English abstract)
[15] 夏义江,姜守阳,李祥荣.论背压在船舶液压舵机系统中的作用[J].舰船科学技术,2020,42(9):170-173.
Xia Yijiang, Jiang Shouyang, Li Xiangrong.On the role of back pressure in the ship's hydraulic steering gear system[J].Ship Science and Technology, 2020, 42(9): 170-173. (in Chinese with English abstract)
[16] 刘妤,张拓,谢铌,等. 小型农用履带底盘多体动力学建模及验证[J]. 农业工程学报,2019,35(7):39-46.
Liu Yu, Zhang Tuo, Xie Ni, et al. Multi-body dynamics modeling and verification of small agricultural tracked chassis[J].Transactions of the Chinese Society of Agricultural Engineering (Translations of the CSAE), 2019, 35(7): 39-46. (in Chinese with English abstract)
[17] 姚艳春,杜岳峰,朱忠祥,等. 基于模态的玉米收获机车架振动特性分析与优化[J]. 农业工程学报,2015,31(19):46-53.
Yao Yanchun, Du Yuefeng, Zhu Zhongxiang, et al. Vibration characteristics analysis and optimization of corn combine harvester frame using modal analysis method[J]. Transactions of the Chinese Society of Agricultural Engineering (Translations of the CSAE), 2015, 31(19): 46-53. (in Chinese with English abstract)
[18] 刘大维,孙海霞,董振国,等. 半挂牵引车车架异常断裂原因分析[J]. 农业机械学报,2007,38(6):30-33.
Liu Dawei, Sun Haixia, Dong Zhenguo, et al. Analysis on the causes of frame abnormal rupture in semi-trailer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(6): 30-33. (in Chinese with English abstract)
[19] 吴伟斌,廖劲威,洪添胜,等. 山地果园轮式运输机车架结构分析与优化[J]. 农业工程学报,2016,32(11):39-47.
Wu Weibin, Liao Jingwei, Hong Tiansheng, et al. Analysis and optimization of frame structure for wheeled transporter in hill orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Translations of the CSAE), 2016, 32(11): 39-47. (in Chinese with English abstract)
[20] 郑雷,周海,曾勇,等. 某履带式收割机底盘车架静态分析与结构改进[J]. 机械设计与制造,2017(3):228-232.
Zheng Lei, Zhou Hai, Zeng Yong, et al. Static analysis and structural improvement of the chassis frame of a crawler harvester[J]. Mechanical Design and Manufacturing, 2017(3): 228-232. (in Chinese with English abstract)
[21] 王品健,谢晖,王杭燕,等. 履带式车辆通过性能仿真及乘员安全分析[J]. 兵器材料科学与工程,2020,43(2):30-36.
Wang Pinjian, Xie Hui, Wang Hangyan, et al. Passing performance simulation and occupant safety analysis of tracked vehicles[J]. Ordnance Material Acience and Engineering, 2020, 43(2): 30-36. (in Chinese with English abstract)
[22] Arvidssion J, Westlin T H, Keller M, et al. Rubber track systems for conventional tractors-effects on soil compaction and traction[J]. Soil and Tillage Research, 2011, 117: 103-109.
[23] 温博伦,陈清华,石明顺,等. 履带式锚杆钻机底盘设计[J]. 建井技术,2019,40(1) :51-55.
Wen Bolun, Chen Qinghua, Shi Mingshun, et al. Chassis design of crawler bolting rig[J]. Well Construction Technology, 2019, 40(1): 51-55. (in Chinese with English abstract)
[24] 刘妤,谢铌,张拓.小型山地履带底盘设计与仿真分析[J].机械设计,2020,37(6):115-122.
Liu Yu, Xie Ni, Zhang Tuo. Design and simulation analysis of small mountain track chassis[J]. Mechanical Design, 2020, 37(6): 115-122. (in Chinese with English abstract)
[25] 高巧明,潘栋,张星,等. 全履带模块化无人农用动力底盘设计与仿真[J]. 农业机械学报,2020,51(S2):561-570.
Gao Qiaoming, Pan Dong, Zhang Xing, et al. Design and simulation of a full-track modular unmanned agricultural power chassis[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S2): 561-570. (in Chinese with English abstract)
[26] 联合收割机橡胶履带系列参数. JB/T 6682-2008[S].北京:机械工业出版社,2008.
[27] 刘海燕. 履带行走机构的计算与选型设计[J]. 采矿技术,2013,13(4):90-93.
Liu Haiyan. Calculation and selection design of crawler walking mechanism[J]. Mining Technology, 2013, 13(4): 90-93. (in Chinese with English abstract)
[28] 鲁鸣,沈文龙. 电动农业车辆履带式底盘设计[J]. 汽车实用技术,2018(19):17-19,36.
Lu Ming, Shen Wenlong. Design of crawler chassis for electric agricultural vehicles[J]. Automotive Practical Technology, 2018(19): 17-19, 36. (in Chinese with English abstract)
[29] 成大先. 机械设计手册:第4卷[M]. 5版. 北京:化学工业出版社,2011.
[30] 张磊,孙玉峰,岳明明,等. 机械液压系统能耗分析及节能设计[J]. 价值工程,2019,38(20):151-153.
Zhang Lei, Sun Yufeng, Yue Mingming, et al. Energy consumption analysis and energy saving design of mechanical hydraulic system[J]. Value Engineering, 2019, 38(20): 151-153. (in Chinese with English abstract)
[31] 张元平,张亮,刘云峰. 波状挡边带式输送机驱动功率计算研究[J]. 机械工程与自动化,2020(4):184-185.
Zhang Yuanping, Zhang Liang, Liu Yunfeng. Research on driving power calculation of corrugated sidewall belt conveyor[J]. Mechanical Engineering and Automation, 2020(4): 184-185. (in Chinese with English abstract)
[32] 孙志刚. 履带式电控拖拉机控制与行走系统设计及试验研究[D]. 哈尔滨:东北林业大学,2018.
Sun Zhigang. Design and Experimental Research on the Control and Walking System of A Crawler Electronically Controlled Tractor[D]. Harbin: Northeast Forestry University, 2018. (in Chinese with English abstract)
[33] 芮强,王红岩,贺小军. 基于虚拟试验环境下履带车辆滚动阻力系数的测试[J]. 装甲兵工程学院学报,2005(2):51-54.
Rui Qiang, Wang Hongyan, He Xiaojun. Based on the test of tracked vehicle rolling resistance coefficient under virtual test environment[J]. Journal of Academy of Armored Forces Engineering, 2005(2): 51-54. (in Chinese with English abstract)
[34] 王金武,唐汉,沈红光,等. 高地隙折腰式水田多功能动力底盘设计与试验[J]. 农业工程学报,2017,33(16):32-40.
Wang Jinwu, Tang Han, Shen Hongguang, et al. Design and experiment of hign clearance roll-waist multifunctional power chassis for paddy field[J]. Transactions of the Chinese Society of Agricultural Engineering (Translations of the CSAE), 2017, 33(16): 32-40. (in Chinese with English abstract)
[35] 刘大为,谢方平,李旭,等. 小型果园升降作业平台的设计与试验[J]. 农业工程学报,2015,31(3):113-121.
Liu Dawei, Xie Fangping, Li Xu, et al. Design and experiment of small lifting platform in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering(Translations of the CSAE), 2015, 31(3): 113-121. (in Chinese with English abstract)
[36] 陈志. 农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007:1-6.
[37] 邵祖峰. 综合附着系数的确定方法及其车速鉴定中的应用[J]. 湖北警官学院学报,2012,25(10):42-45.
[38] 田坤. 轻小型平移式喷灌机研制及其稳定性分析与试验[D]. 镇江:江苏大学,2017.
Tian Kun. Development and Stability Analysis of the Small-scale Linearly Moved Irrigation System[D]. Zhenjiang: Jiangsu University, 2017. (in Chinese with English abstract)
[39] 全国农业机械标准化技术委员会. 农业机械生产试验方法:GB/T5667-2008[S]. 北京:中国标准出版社,2008.
Development of reed shoot harvesters
Liao Kai, Gu Quanyuan, Gao Zicheng, Xiang Mingyou, Tang Tong, Min Shuhui, Li Lijun
(,,410004,)
Reed harvesting has been confined to the high labor intensity of manual picking reed and muddy working environment in recent years. In this study, a self-propelled crawler reed harvester was developed with high stability suitable for mechanized picking in the wetland. Four components were composed of the picking, lifting, collecting modules, and self-propelled crawler chassis. The machine was utilized to realize the automatic picking and collection of reeds. A diesel engine was selected to drive the whole machine. The transmission system was divided into mechanical and hydraulic parts. The mechanical transmission was used to move and collect the longitudinal transmission power, whereas, the hydraulic transmission provided the power adjustment of the picking device, transverse collection speed regulation, and lifting module. Firstly, the synchronous belt traction and towing picking device were designed, according to the stress characteristics of reed picking. The specific operational parameters were included: the pitch angle was adjustable from 0 to 60°, and the maximum ground clearance of the front end was 400 mm, and the picking width was 876 mm. At the same time, the picking device was equipped with a variable amplitude lifting module, where the lifting height was up to 200 mm from the ground for the passing performance and operation. A conveying and collecting device of reed shoots was then designed, according to the biological characteristics of the reed. Specifically, the belt speed was 0.5 m/s for the longitudinal conveying device, while, 1 m/s for the transverse collecting device. Finally, a self-propelled crawler chassis was designed with a supporting power of 13.3 kW, according to the distribution of each module and transmission relationship. The power and driving performance of the whole machine were calculated to determine the power demand of the full load. The transverse and longitudinal limit inclination and transverse slip angles were obtained for the driving requirements in the lake area. The picking test showed that the picking efficiency, damage rate, and missing mining rate were 71 kg/h, 8%, and 7.6%, respectively. The driving performance of the whole machine was stable with 0-9 km/h driving speed range, while, the height adjustment range of the front end of the picking device from the ground was 0-638 mm, suitable for the terrain to pick shoots. The maximum longitudinal depression angle, elevation, and transverse tipping angle of the whole machine were 50°, 63°, and 45° respectively, whereas, the longitudinal and transverse limit slip angles were 42° and 38°, respectively, indicating the excellent wetland trafficability and stability. The finding can provide reliable technical support to the structural optimization and intelligent upgrading of self-propelled reed shoot harvester.
agricultural machinery; design; experiments; self-propelled; reed shoots; harvester; driving performance
廖凯,古全元,高自成,等. 芦苇笋采收机研制[J]. 农业工程学报,2021,37(15):20-30. doi:10.11975/j.issn.1002-6819.2021.15.003 http://www.tcsae.org
Liao Kai, Gu Quanyuan, Gao Zicheng, et al. Development of reed shoot harvesters[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(15): 20-30. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.15.003 http://www.tcsae.org
2021-04-12
2021-06-14
湖南省重点研发计划资助项目(2019NK2022)
廖凯,博士,博士生导师,研究方向为农林机械装备及智能化。Email:liaokai102@csuft.edu.cn
10.11975/j.issn.1002-6819.2021.15.003
S225.99
A
1002-6819(2021)-15-0020-11