基于计算力矩法的骨折复位机器人系统仿真
2021-11-19董鑫宇傅卓鑫
董鑫宇,孙 昊,郭 悦,傅卓鑫
(1.河北工业大学,天津 300132;2.国家康复辅具研究中心附属康复医院,北京 100176)
1 引言
长骨骨折是骨折中最常见的骨折种类,其中股骨,肱骨骨干骨折分别占成年人骨折的6%和5%[1],骨折发生时,闭合的复位并固定是最佳的治疗方案。该方法的优势在于可以减少软组织解刨,对于骨折愈合,尤其是软组织挫伤严重或有骨膜损伤的骨折愈合的意义重大。外科医生在治疗骨折的过程中,常常需要多名经验丰富的医生联合进行操作,即便是最优秀的医生团队在消费大量体力的同时也不能保证每名患者的复位效果满足预期。骨折复位完成后还需要考虑如何固定以及进一步促进愈合的问题,内固定虽可靠,但需切开骨折端,对血运破坏明显,容易导致感染和不愈合。而外固定则易面临复位不彻底、术后固定失效和松动断裂等问题。上述问题的解决在目前看来必须依赖骨科机器人的引入。通过骨折复位机器人进行骨折复位的治疗,骨折复位的精度将得到提高,同时因为不知疲倦的机器手臂可以稳定控制骨断端,理论上将可以明显的减少传统骨折复位手术中的并发症,如挤压、血管神经损伤或者二次骨折的发生。
并联机构具有承载能力强,末端执行器精度高等优点,6-UPU并联机构是一种六自由度并联机构,动平台与连杆之间由虎克铰相连,末端执行器在空间有平移及旋转的六个自由度,十分契合骨外科手术的需求。国内外研究者投入了大量精力研究类似的并联机构治疗骨折或骨畸形,并获得了一定实质性成果。Seide[2]教授基于Taylor骨外固定架,给Stewart平台的执行连杆加装了电驱动器,并用计算机对驱动器进行控制和检测。该机构缩短了复位的周期,轨迹的规划也更为灵活,但由于成本高且在拍摄骨折处透影像时,机构和电器设备会给成像效果造成很大程度上的干扰,并未广泛的应用于临床。Changsheng Li[3]等人将Stewart机构做为执行器应用在闭合性骨干骨折复位手术中,并利用利用串联误差传递模型和并联机构误差差分求解方法建立误差模型,分析了骨折复位的精度。H.Lin[4]等人将并联机器人机构引入骨牵引台并实施了股骨骨干的骨折复位。上述文献从不同角度介绍了并联机构在骨折复位及畸形矫正方面的应用,但缺乏对机构本身运动学机构动力学性能的分析。本文基于一种新颖的骨折复位机构,从运动学及动力学角度分析机器人设计的合理性和利用该机器人进行骨折复位手术的可行性。
本文介绍了一种新颖的骨折复位机器人,介绍了利用该机器人进行骨折复位的方法,并针对机器人的主要执行机构进行了逆运动学分析。利用SimMechanic建立了机器人执行机构的动力学仿真模型,并通过拉格朗日法建立了详细的动力学模型,推导出了该机构的雅各比矩阵,通过分析驱动关节与末端执行器的受力情况,验证了该动力学模型的正确性。最后,利用建立的机构动力学模型设计了关节空间中基于计算力矩法的机器人控制器,通过非线性反馈补偿机器人的非线性部分,使得机构利用线性控制器也可以获得满意的控制效果。
2 骨折复位机器人机构设计
在传统骨折复位手术过程中,医师通过牵引并缓慢矫正移动骨相对于近端参照骨的畸形来实现复位。骨折发生时,移动骨相对于参照骨有可能会形成复杂的畸形状态,根据刚体在空间的姿态描述,可以通过6个自由度来确定移动骨相对于参照骨的全部畸形状态,即3个旋转自由度和3个平动自由度。为了满足一定范围内移动骨复位的需求,采用6-UPU并联机构作为机器人的主要执行机构。基本的骨折复位手术生物学固定原则指出,外固定减少了植入物与组织的接触面积,很大程度上减少了骨折复位并发症的发生。通过考虑传统骨折复位手术中医生体力消耗大,复位精度不高等问题,参考了医生的复位手法相关临床经验,利用Soildworks软件设计骨折复位机器人如图1所示,图2为复位机器人的主要执行机构。该机器人由轨迹规划单元,位姿反解单元,控制系统及执行机构组成,并联机构的动平台作为主要的执行器对移动骨进行牵伸和对位。利用骨折复位机器人进行骨折复位手术的流程可以分三个阶段:
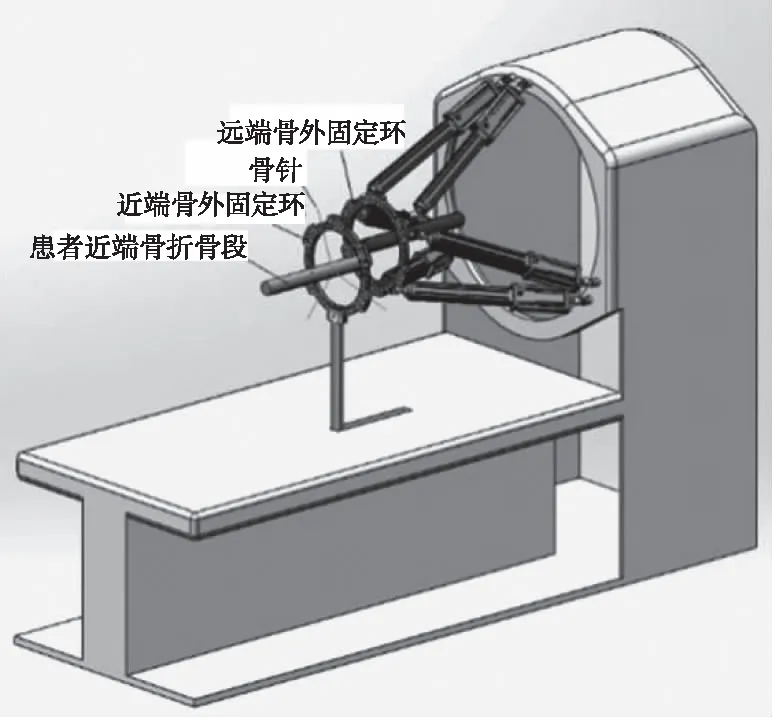
图1 骨折复位机器人系统

图2 骨折复位机器人执行器部分
首先利用骨外固定环分别固定患者远端及近端,由远端环充当并联机构的移动平台,近端与手术床保持刚性连接。再通过透视影像测算移动骨与参照骨的相对位姿,利用计算机软件根据医生的临床经验设计移动骨的复位轨迹,机器人根据设定好的复位轨迹进行骨折复位。在复位结束后,通过定制外固定连杆连接近/远端的骨外固定环构成六自由度外固定器或采用内固定(如髓内钉或钢板等)的方式固定。最后断开固定环与手术床与机器人的连接,结束手术。
3 骨折复位机器人逆运动学分析
本文主要以骨折复位机器人的执行机构为研究对象。由于并联机构的正运动学问题分析较为复杂且本文在对其进行控制时刻意回避了正运动学求解,因此本文仅对骨折复位机器人并联执行机构的逆运动学进行分析及求解。图3为该机构的结构简图。
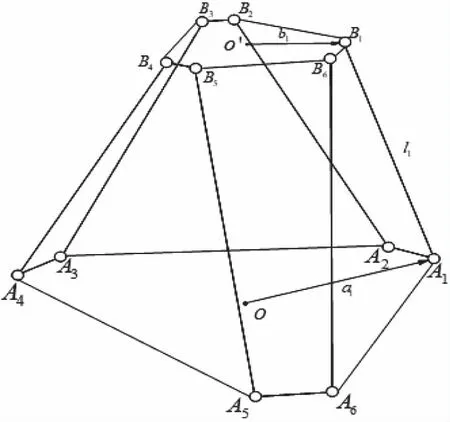
图3 骨折复位机器人机构简图

(1)

因此,第i根支链的长度ρi可以表示为
至此,给定动平台相对于定平台的位姿变化,就能通过(1)式计算出各执行器的长度,这实际上就是骨折复位机器人逆运动学的求解过程。
4 骨折复位机器人的动力学建模
4.1 拉格朗日法求机器人动力学方程
本文利用拉格朗日法建立骨折复位机器人执行机构的动力学数学模型。利用拉格朗日法建立机构的动力学模型,对于骨折复位机器人这一完全约束的并联机构,支链与平台构成封闭的结构,机构的每个部分存在许多中间坐标和约束条件,通常相互依赖。首先需要采用合适的广义坐标求解系统的动能和势能[5]。根据虚功原理的定义,在广义坐标的基础上定义拉格朗日函数为
L=K-P
(2)
其中K表示系统的动能,P表示系统的势能,由于机构动能取决于广义坐标及其它们时间的导数,势能取决于广义坐标本身,则系统的拉格朗日方程为:
其中Q表示广义力,对于六自由度并联机构,选取运动平台质心位置变量和螺旋系下的姿态变量X作为广义坐标。机械臂的动能可以由质量矩阵M(X)表示
因此拉格朗日函数可以重写为
由于动能是速度向量的二次型,将上式带入式(2)可得
定义

(3)

(4)
在拉格朗日方程中,式(3)包含了科氏力与离心力加速度引起的所有惯性力,为了简化科氏力和离心力向量,利用张量积可以将V表示为如下形式
根据张量积的运算法则,定义C被表示为如下形式
采用这种表示形式,对于任何并联机构的动力学方程都可以写成一般的封闭形式:
为了应用机构参数及运动学参数并推导出骨折复位机构具体的动力学方程,将机构分解为运动平台和6条支链分别建立其动力学方程,分别建立广义坐标并独立分析,最后通过转换关系将两部分合并,求出动力学矩阵的参数表达式。
首先建立各支链的运动学方程。假设每个支链由动臂和静臂两部分组成,动臂和静臂的质心分别为ci1和ci2,质量分别为mi1,mi2.作用于肢体上的有外部力,驱动力和重力并假定没有扰动扭力。定义支链与上平台铰点Bi的位置为广义坐标。定义为xi,支链动力学方程的一般形式为
质量矩阵可以从每个肢体的动能中直接求出
重力项Gi可以根据势能相对于广义坐标xi的偏导求得,即
科氏力和离心力项则根据拉格朗日等式的拉格朗日函数的时间导数直接求得。
下面出了它们的具体形式
(5)
(6)
(7)
其中

骨折复位机器人的动平台是一个几何对称质量均匀的刚体,选取运动平台自身的运动参数X作为广义坐标,建立运动平台的动力学方程
其中质量矩阵可以从运动平台动能推导而来
科氏力与离心力向量可以通过将质量矩阵相对于时间进行微分以及将动能相对于广义坐标进行微分得到
重力项则是通过将动平台势能对广义坐标求偏导得到:
最终,动平台的动力学矩阵为
(8)
(9)
(10)
为了获得机构整体的动力学矩阵,需要将中间广义坐标系xi通过雅各比矩阵Ji转化为全局的广义坐标X,并按如下公式计算骨折复位机构的整体动力学矩阵
此外,作用于机构的广义力Q可以认为是驱动力与扰动扭转力Fd共同作用,即
Q=JTτ+Fd
至此,即求得了骨折复位机构的动力学方程的封闭形式,该形式有助于将先进的控制策略运用到控制系统中。
4.2 逆动力学仿真
通过给定末端执行器运动轨迹,观察各支链及平台所受的力是否符合预期,可以验证动力学模型建立的正确性和完整性。首先需要为机器人的动平台设定运动的轨迹。由于6-UPU并联机构在空间有3各个平移及三个旋转的自由度因此需要为6个自由度分别设计运动轨迹。处于机器人考虑,因此希望执行器可以柔和的启动并缓慢的停止,即希望末端执行器在个自由度的起始和终止速度为零,并且在轨迹的中间阶段运动尽可能保持匀速,多项式函数可以被用于模拟机构的运动轨迹,本文采用三次多项式表示个自由度的运动轨迹
q(t)=a0+a1t+a2t2+a3t3
轨迹的速度为
通过Simulink模拟了动平台的运动轨迹,设置仿真时间为6秒并模拟了三条动平台的运动轨迹如图4所示,分别使动平台沿Z轴平移30mm,沿X轴及Z轴分别平移30mm及绕Y轴旋转30度,其中蓝色线段表示机构的起始状态,红色线段表示机构的终止状态。将该轨迹输入骨折复位机器人的动力学模型,认为作用于机构的外部力只有重力g=[0,0,-9.8]T,其对应的平台受力曲线如图所示,利用力雅可比矩阵得到各支链的受力情况如图5所示。

图4 由左到右分别为动平台沿z轴上升30mm;动平台分别沿z轴和x轴移动30mm;动平台绕X轴旋转20度
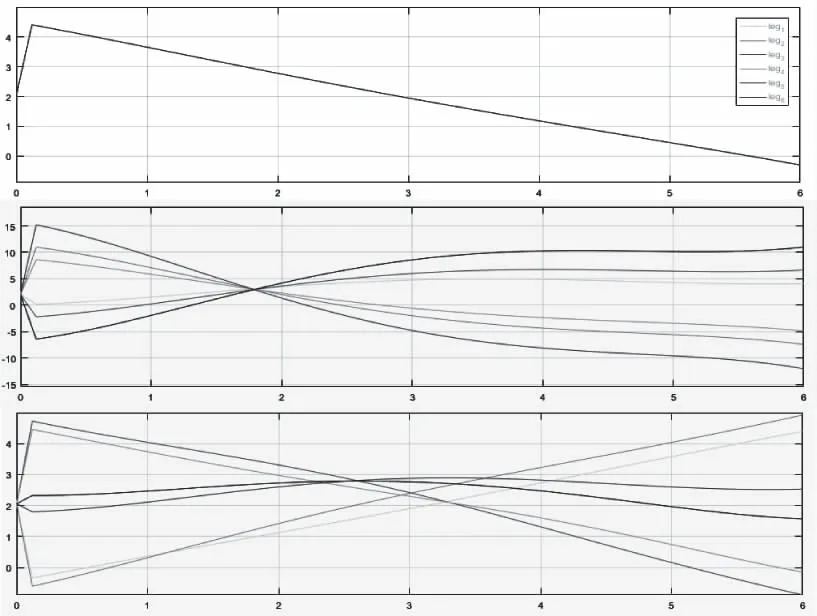
图5 各支链在三种运动轨迹下所受的力
三组轨迹下的动平台分别沿着Z正方向的力向上移动30mm,沿Z轴及X轴同时各移动30mm和绕Y轴旋转30度,并经历先加速再减速的过程,由于设置Z轴沿竖直向下,动平台沿各轴受力偏离0轴,以克服重力的影响。
5 骨折复位机器人控制系统设计
5.1 关节空间的控制系统架构
基于工作空间的控制系统如图6a所示,期望轨迹与机构输出的轨迹产生的偏差被送入控制器,控制器根据机构的动力学模型产生相应的关节驱动力输入机构的各个关节,构成一个闭环系统。但是,实际的情况是,机构动平台的运动参数X通常很难直接测量,相比于测量动平台的运动参数,测量主动关节的位移变化更加经济方便。一种可行的方法是通过在工作空间中设计控制器,通过传感器测量机构关节空间中的关节变量,并通过前向运动学求解工作空间中动平台的位姿X,但由于前向运动学需要求解一系列非线性方程,计算复杂度高,尤其是需要实时的提供控制信号时,该方法的实现较为困难。相比于前向动力学,并联机构的反向运动学求解就要简单的多。本文首先利用并联机构的反向运动学模型根据机器人的期望轨迹计算出相应的期望关节位移量Ld,基于期望关节位移与实际关节位移q(t)在关节空间的误差eq来设计控制器,控制器输入是误差eq,输出是执行器关节的力τ。通过这种改变,明显减少了动态系统的耦合性和非线性特性,使得在控制架构中为每个关节设置独立控制器变得有效。
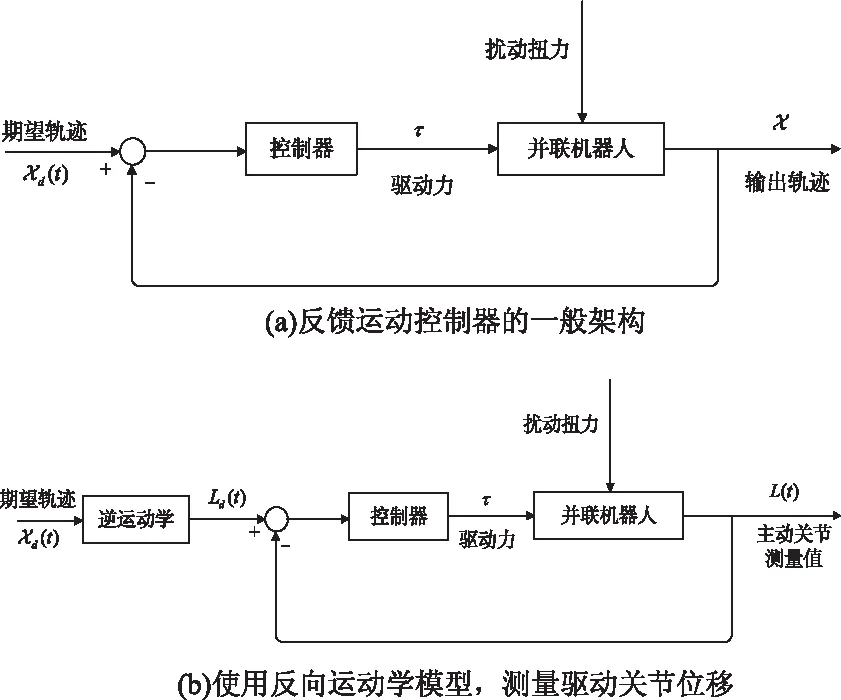
图6 控制系统架构
由于上一章所推导的机器人动力学模型是在工作空间中建立的,再利用关节空间的控制架构时有必要将动力学模型转换到关节空间中。执行器的力矩向量和对应的工作空间的广义力的关系可以表示为
F=JTτ
其中J为机构的雅各比矩阵。由于机构是完全约束的机构,雅各比矩阵在非奇异状态下可逆。工作空间中加速度与速度可以表示为

(11)
Mq=J-TM(X)J-1
Gq=J-TG(X);τd=J-TFd
5.2 逆动力学模型的控制系统设计
计算力矩法是典型的考虑机器人动力学模型的控制方案,通过机器人的动力学模型为PD控制的输出提供了非线性的补偿,使得被控对象变成更容易控制的线性定长系统,再采用PD控制便可以的到满意的控制效果。式(11)为机器人在关节空间中的动力学方程,计算力矩法的控制架构如图7所示。

图7 逆动力学模型控制
各支链获得的控制量为
机器人的动力学方程可以表示为
若动态矩阵的值精确且M(q)可逆,则可以消去上式的非线性项,上式等价于一个解耦的线性定常系统
当期望轨迹qd(t)给定后,可对上述系统引入包含偏置的PD控制
式中e=qd(t)-q(t),Kd,Kp均是对角矩阵且正定的。闭环系统的方程为
5.3 逆动力学模型的控制系统仿真


图8 动平台运动轨迹
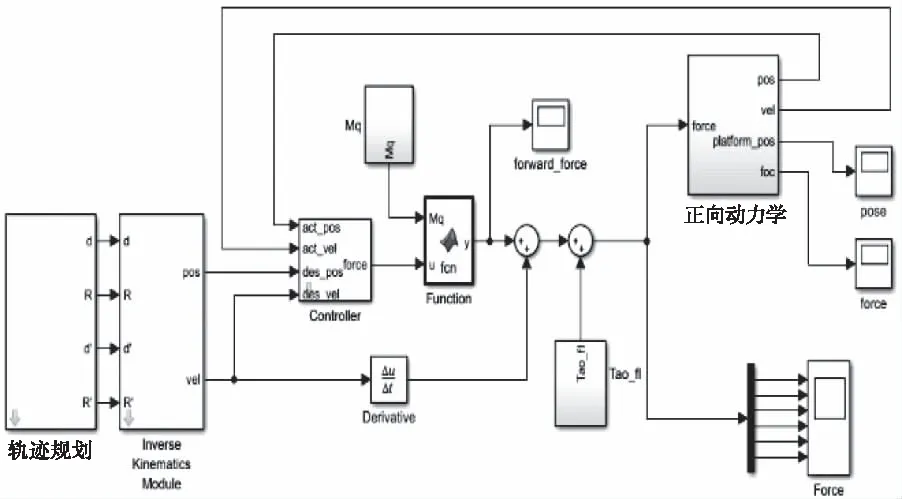
图9 基于力矩法的仿真控制系统


图10 各杆的长度变化
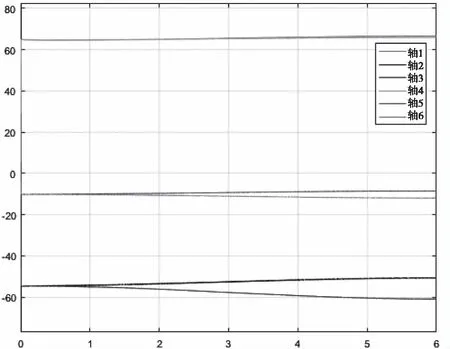
图11 各杆的受力情况
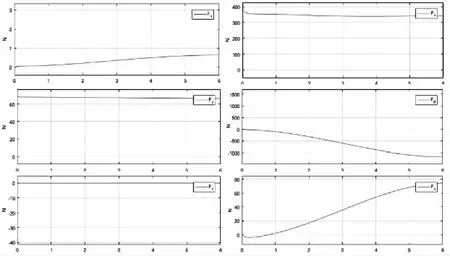
图12 动平台受力情况
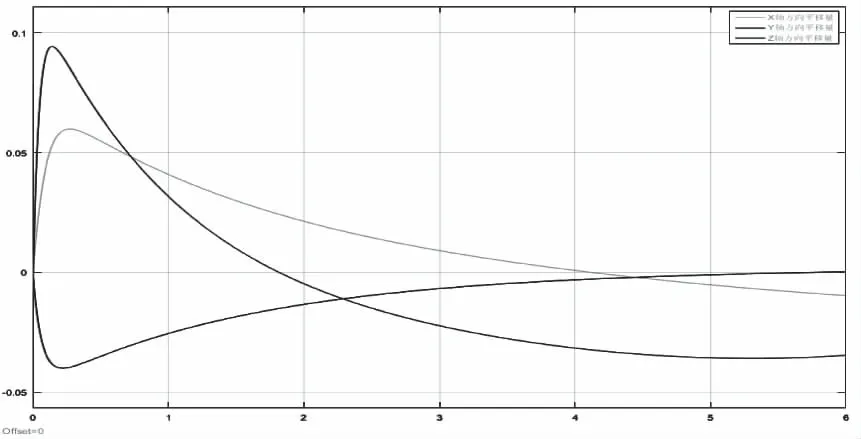
图13 动平台实际的运动轨迹及与期望轨迹的误差
左图为期望变换曲线,右图为实际变化曲线
6 结论
本文设计了一种新型的并联骨折复位机器人用于替代外科医生来进行长骨骨折复位手术。该机构通过动平台带动骨折远端移动骨进行空间上六个自由度的运动以实现骨折复位的目的。通过MATLAB软件中的SimMechanic工具箱结合Soildworks软件设计骨折复位机器人,通过Simulink工具箱搭建了机构的轨迹生成模块及反向运动学求解模块,对骨折复位机器人机构进行了运动学仿真。基于运动学分析的结果,运用拉格朗日法建立了该骨折复位机器人的动力学模型,并探究了平台位姿与关节驱动力及平台受力的关系;利用计算力矩法在关节空间中设计了骨折复位机构逆动力学控制器。通过该仿真结果可以看出引入机构动力学模型的计算力矩法的控制器使得机器人具有较好的跟踪性能及鲁棒性。该研究为实际控制器设计及控制系统开发提供了理论支持。