基于Carsim的驾驶仿真系统开发
2021-11-19李曙光杨亚茹
吉 豪,李曙光,杨亚茹,王 颖
(1.四川大学机械工程学院,四川 成都 610065;2.电子科技大学自动化工程学院,四川 成都 611731)
1 引言
驾驶仿真系统是计算机仿真技术应用在汽车领域的一个典型案例,主要由操纵平台、车辆动力学模型和运动模拟平台组成[1-2]。可用于驾驶技能培训、驾驶员行为特性研究、车辆在极限工况下的性能测试、硬件在环仿真测试、车身结构参数优化等[3-4]。而车辆动力学建模是开发驾驶仿真系统的核心和关键技术,也是其开发过程中的难点所在。
王伟等人通过车辆运动时的受力分析为驾驶模拟系统搭建了动力学仿真模型,提高了仿真模型的准确性[5]。詹军等人开发了车辆动力学系统的转向模型、制动系统模型,提高了ADSL驾驶模拟器的逼真度[6]。苏光磊在Simulink中创建了车辆动力学模型,加快了驾驶模拟器仿真模型的搭建工作[7]。可以发现,建立更加准确的车辆动力学模型可以提高驾驶仿真系统的精度和有效性,但是通过分析和数学建模的方法来搭建驾驶仿真系统的车辆动力学模型较为困难和复杂。
Carsim车辆动力学软件可通过配置参数的方式快速地搭建出仿真汽车的车辆动力学模型和行驶场景,还可以进行实时仿真。许吉禅等人利用Carsim快速的搭建出了车辆半主动悬架的仿真模型,通过仿真测试改善了车辆悬架的性能[8]。张玉洁设计了基于Carsim的电动助力转向系统,通过Carim的实时仿真模式的数据输入输出接口对其进行了硬件在环仿真测试[9]。鲁玉萍等人利用Carsim和Simulink搭建了车辆动力学模型,通过实验对比仿真模型和样车测试数据,结果表明Carsim仿真模型具有较高的准确度[10]。利用Carsim软件可快速地搭建出较为准确的驾驶模拟系统的车辆动力学仿真模型,还可以通过其数据接口对其搭建的仿真车辆进行实时控制以及处理其动力学模型输出的车辆行驶数据。
本文利用不同于数学建模的方法,通过配置参数在Carsim中快速搭建了驾驶仿真系统的车辆动力学模型,并利用其数据接口开发了操纵平台和运动模拟平台,改善在开发驾驶仿真系统的过程中车辆动力学建模复杂的问题,降低驾驶模拟系统车辆动力学建模的难度,简化了开发过程。
2 操纵平台
驾驶仿真系统的操纵平台用于采集操纵人员的控制指令。其主要由传感器和DSP开发板组成,如图1所示。为了满足该系统对于处理速度、计算精度等方面的要求,采用型号为TMS320F28335的DSP处理器。该芯片主频高达150MHz,能够进行32位浮点运算,并且具有丰富的外设接口与通信模块。

图1 操纵平台硬件
信号采集框架如图2所示。传感器主要包括油门踏板传感器、刹车踏板传感器、方向盘转角传感器、档位位置传感器。油门和刹车踏板传感器将踏板的位移转换成相应的电压信号输出,利用DSP的ADC模块采集该电压信号;利用其CAN总线通讯接口读取方向盘转角传感器输出的转角数值信号;利用外部中断模块检测档位位置传感器输出的电平信号,从而读取状态信息。
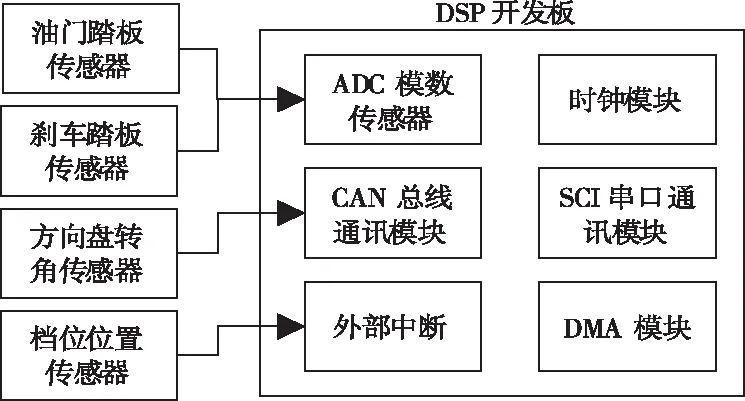
图2 信号采集框架
通过配置采样量化寄存器可以有效地去除毛刺信号的干扰。使用DMA模块直接访问ADC采样结果寄存器并发送给SCI模块的数据寄存器,可将采样采集到的数据通过RS232串口通讯模块直接发送给上位机程序,无需经过CPU处理,有效地降低了DSP处理器的负担。
3 动力学联合仿真环境
Carsim汽车仿真软件的LabVIEW_RT模式可实现与LabVIEW软件的共同运行,快速地搭建出动力学联合仿真环境,如图3所示。

图3 动力学联合仿真环境
3.1 Carsim仿真环境
Carsim软件的Road页面中提供了车辆行驶的三维场景,并且可以设置路面附着系数等参数;在Vehicle Configuration中设置车辆的车身结构、风阻系数、轮胎模型、悬架模型等参数,搭建车辆仿真模型;在Run Control中设置主机和目标机IP、仿真步长、仿真输入输出参数,实现与LabVIEW软件的数据交互。
3.2 LabVIEW上位机程序
利用LabVIEW软件的图形化编程语言可快速地开发上位机程序,与Carsim软件联合仿真,该程序具有以下功能模块:
1)串口数据读取。利用VISA串口配置、串口接收、串口关闭等模块读取串口通讯数据;通过RS232转USB芯片,接收DSP采集并发送过来的传感器信号数据。
2)信号处理。使用中值滤波算法模块对信号进行滤波处理:设定采样窗个数,按照数值大小排序,去掉最大值和最小值后,取剩余数据的平均值输出;在零点位置加入死区环节,进一步降低干扰造成的数据波动。
3)数据交互。通过不断循环调用与Carsim连接的初始化(Init.vi)、单步(Step.vi)和停止(Terminate.vi)子VI程序实现数据交互,把控制信号发送给Carsim,同时接收其返回的车辆行驶数据。
4)数据显示。利用数值显示控件显示控制信号以及车辆实时数据信息。
4 运动仿真平台
利用Washout算法和六自由度平台开发驾驶仿真系统的运动仿真平台,该平台用于模拟Carsim中的仿真车辆在行驶过程中的加速度和车身姿态,为驾驶人员提供更加逼真的驾驶感受。
4.1 系统组成
Carsim可实时计算出车辆加速度和角速度,并发送给LabVIEW进行处理。由于六自由度平台的运动范围有限,不能完全复现出车辆行驶过程的车身姿态,所以利用LabVIEW控制设计工具包编写Washout算法程序对Carsim输出的直线加速度α和旋转角速度ω进行处理,将其转换成六自由度平台的位移距离S和旋转角度θ,并通过TCP/IP模块发送给六自由度平台控制器,实现实时的运动模拟。
4.2 Washout算法设计
Washout算法结构如图4所示。主要由高通直线加速度通道、低通直线加速度通道和高通角速度通道组成。
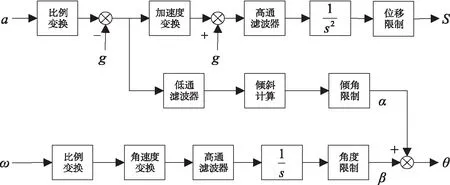
图4 Washout算法框图
4.2.1 高通直线加速度通道
利用高通滤波器过滤出Carsim动力学模型输出的车辆运动过程中的高频直线加速度,再通过二次积分转换成平台的位移S。
比例变换:由于六自由度平台的运动范围有限,需要利用比例环节对输入的加速度幅值进行限制,避免其超过最大幅度。采用三阶多项式设计该环节
(1)
y=a0+a1x1+a2x2+a3x3
(2)
式中,ax、ay、az分别为X、Y、Z三轴方向的直线加速度。
由于人体感知加速度的耳石器官是通过比力来感受运动加速度,因此需要对加速度进行比力变换
fg=a-g
(3)
式中,fg为比力;g为重力加速度。
加速度变换:利用变换矩阵L将车辆的直线加速度从体坐标系变换到惯性坐标系
f1=Lfg
(4)
L=LxLyLz
(5)
(6)
(7)
(8)
式中,σ、∂、λ分别为绕X、Y、Z轴的旋转角度;Lx、Ly、Lz为分别为对应的旋转系数矩阵。
二阶和三阶高通滤波器传递函数一般形式为
(9)
(10)
式中,H(s)、G(s)分别为二阶、三阶高通滤滤波器对应的传递函数;k为放大系数;ωn为自然响应频率;ωb为一阶环节转角频率;ξ为阻尼比。
当输入幅值为1的阶跃信号时,利用终值定理
(11)

(12)
通过上式可以发现:使用二阶高通滤波器后经过二次积分得到的位移值非零,平台会停在某个位置;而使用三阶高通滤波器得到的输出值会逐渐变为0,平台会回逐步到初始位置,可以为下一次运动提供更大的运动范围,输出结果对比如图5所示。
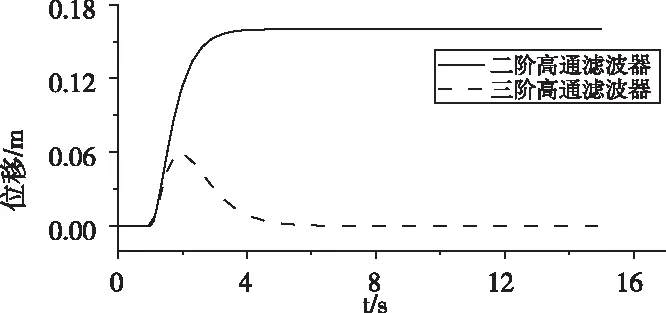
图5 滤波器性能对比
4.2.2 直线加速度通道
利用低通滤波器过滤Carsim输出的低频直线加速度信号,再通过计算转换成角度。使平台倾斜一定角度,利用重力加速的分量模拟低频和持续性的加速度运动。
低通滤波器的传递函数一般形式
(13)
平台倾斜角度α计算
(14)
4.2.3 高通角速度通道
利用高通加速度通道过滤出Carsim输出的高频直线加速度,通过一次积分转换成平台的旋转角度β。
通过角速度变换矩阵T将角速度转变成惯性坐标系下的欧拉角变换率
ω1=Tω
(15)
(16)
式中,ω为欧拉角变换率。
其它各个环节与高通直线加速度通道类似,不再叙述。
5 实验
为了验证所设计的驾驶仿真系统的有效性,设计了驾驶仿真和运动仿真。驾驶仿真通过对比驾驶输入控制量和驾驶仿真系统输出参数来验证该仿真系统的跟随性。通过运动仿真验证六自由度运动平台模拟车辆运动的性能,以及Washout算法在该仿真系统的有效性。驾驶模拟器仿真系统如图6所示。

图6 驾驶仿真系统
5.1 驾驶仿真
记录采集到的方向盘、油门、档位、刹车传感器信号并将其转换成方向盘转角、发动机节气门开度(百分比)、档位、制动压力,发送给Carsim进行实时驾驶仿真,然后将与Carsim输出的数据对比,实验结果如图7、8、9、10所示。

图7 转向实验
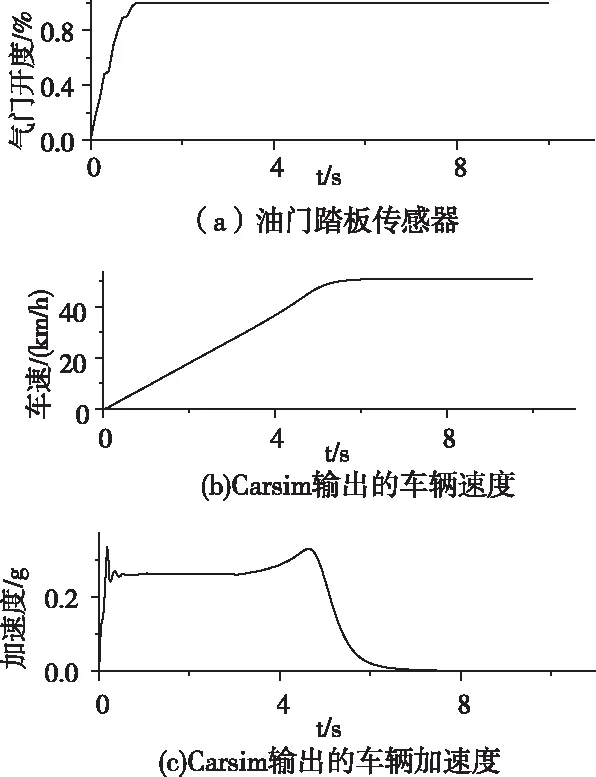
图8 加速实验

图9 换挡实验
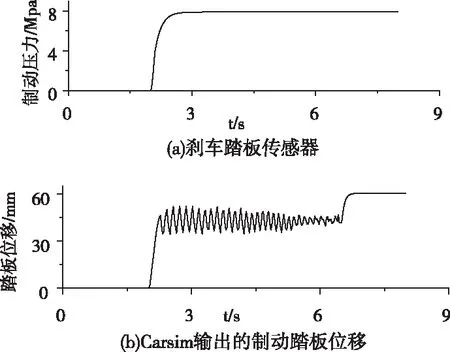
图10 ABS制动实验
驾驶仿真包括转向仿真、加速仿真、换挡仿真和制动仿真。由图7、8、9、10可知:Carsim输出的前轮转角和车辆侧向加速度响应能够很好地跟随采集到的方向盘传感器角度信号;锁定变速箱档位,输入给定的油门信号,输出的车辆速度会逐渐达到峰值,加速度会逐渐变为0;当变换档位时,离合器的闭合状态以及车辆在X方向的加速度会发生相应的变化;将采集到的刹车踏板传感器信号转换成制动压力输入Carsim,处于ABS模式的制动系统会使刹车踏板的位移出现抖动,最后达到稳定。通过测试,发现输出相应的延迟低于10ms,能够满足实时性的要求。
5.2 运动仿真
利用给定测试信号作为输入,测试运动仿真系统中设计的Washout算法,输出结果如图11所示。
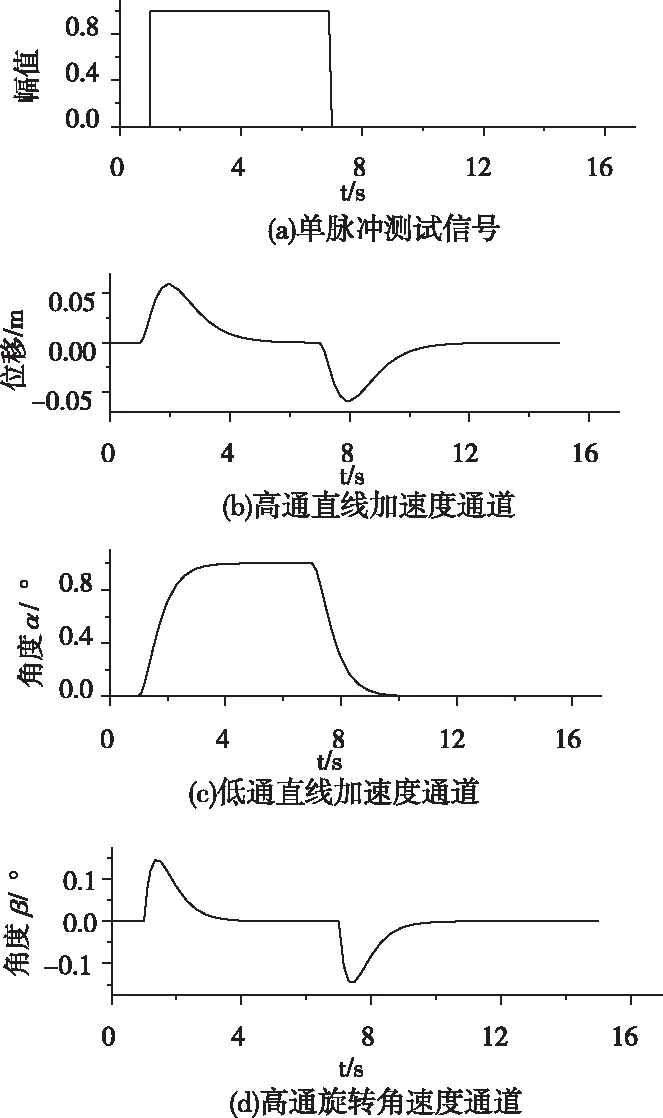
图11 算法仿真
由图11可知:高通直线加速度通道可过滤出车辆行驶过程中的高频直线加速度并将其转换成位移,使平台运动相应的距离,当加速度稳定后,输出的位移变为0,平台逐渐返回原点;低通加速度通道过可过滤出低频直线加速度,并转换成一定的倾斜角度,用于模拟低频和持续性的加速度;高通角速度通道可过滤出高频角速度,将其转换成对应角度,使平台倾斜,模拟车身姿态。
6 结论
本文提出基于Carsim的驾驶仿真系统开发方案,通过配置参数在Carsim中快速搭建了车辆动力学模型,将操纵平台采集到的驾驶员控制指令接入到Carsim的数据输入接口,利用Washout算法处理Carsim动力学仿真模型输出的车辆加速度、角速度。通过实验发现在Carsim中搭建的车辆动力学模型的输出响应对控制信号的跟随性较好,根据其输出的车辆行驶参数搭建的Washout算法有效地模拟了车辆运动,该方案降低驾驶仿真系统开发过程中动力学建模的难度,加快了开发过程,具有可行性和有效性。