电液伺服泵控系统柔性传动比理论研究
2021-11-17闫桂山张天贵陈革新贾春玉陈文斌
李 渊, 艾 超, 闫桂山, 张天贵, 陈革新,4, 贾春玉, 陈文斌
(1.燕山大学 机械工程学院, 河北 秦皇岛 066004;2.河北省重型机械流体动力传输与控制实验室, 河北 秦皇岛 066004;3.燕山大学 先进锻压成形技术与科学教育部重点实验室, 河北 秦皇岛 066004;4.新疆工程学院 机电工程学院, 新疆维吾尔自治区 乌鲁木齐 830023)
引言
电液伺服泵控系统相较于阀控系统具有抗污染能力强,设备占地面积小,功率电传和环境友好等技术优势[1-2],因此得到了国内外很多学者和企业的高度重视。随着对泵控技术的深入研究和伺服电机技术的逐渐成熟,泵控技术得到进一步发展,目前已经在航空航天领域[3]得到广泛应用,并且正在逐渐拓展应用到机器人[4]、锻压、风电、海工、船舶[5-6]、冶金、工程机械[7-8]等领域。
电液伺服泵控系统受参数时变及机电液耦合等综合影响[9],系统传动具有一定柔性传输规律,表现为较强的非线性。针对电液伺服泵控系统非线性柔性传动规律,国内外进行了大量研究。YUAN H B等[10]考虑了油液压缩、系统泄漏等非线性扰动,建立了系统的非线性传输数学模型,并采用灰箱系统辨识进行模型参数辨识。REN G等[11]通过研究系统油液泄漏引起非线性传动规律,以此为基础设计增益控制器,对系统高精度控制进行补偿。HELIAN B等[12]针对液压泵低转速下压力脉动非线性规律,采用自适应鲁棒控制策略,显著提高了泵控系统的动静态特性。和东平等[13]针对系统垂直方向非线性传输规律,分析了非线性刚度系数、非线性阻尼系数等参数对系统控制的影响规律。袁晓明等[14]研究油液系统体积弹性模量对系统传动特性的影响规律,运用Model1模型提高了流体压缩和膨胀过程中动态体积弹性模量的匹配度。上述研究为电液伺服泵控系统非线性传输特性研究奠定了良好的基础。
本研究针对电液伺服泵控系统中的非线性传动问题,从广义传动比的角度进行研究和分析,提出柔性传动比理论,得到伺服电机-定量泵-液压缸之间的柔性传动比规律,研究柔性传动比的应用,提出基于广义排量的压力控制策略,并对其进行仿真和试验研究。
1 工作原理
本研究以电液伺服泵控系统为研究对象,系统具体工作原理如图1所示。系统采用伺服电机-定量泵-液压缸传动形式,与具有刚性传动比的传统伺服电缸的滚珠丝杠传动形式相比,由于系统存在油液的泄漏、体积弹性模量改变等非线性因素,其具有柔性传动比特性,具体对比如图2所示。

1.伺服电机 2.定量泵 3.过滤器 4.单向阀 5.溢流阀 6.压力传感器 7.补油蓄能器 8.对称液压缸 9.位移传感器

图2 传动比特性对比图
2 柔性传动比
由以上分析可知,电液伺服泵控系统表现出柔性传动比特性,但对于系统输入为转速、转矩等转动物理特性参量,输出为直线位移、速度等平动物理特性参量,两者存在一定的量纲差异,无法直接应用传统传动比概念。为解决上述问题,本研究采用广义传动比方法对系统柔性传动比规律进行表达。

(1)
从式(1)中可以解出X=L。
机械效率可用输入、输出动力与原机构相同,不存在摩擦的等力理想机构的广义传动比与实际广义传动比之比表示,适用于任何机械结构的传动效率计算,使得任何机械结构的传动效率都可以通过传动比来计算分析,称为传递效率的普遍式。同样的,将广义传动比的概念引入液压传动系统中,由于液压系统的柔性传动特性,将上述的液压传动中广义传动比定义为柔性传动比If。通过分析不同类型液压系统的各种工况,建立对应的数学模型,见表1。

表1 SI标准力学量纲
通过分析系统的低速低压、高压低速工况,建立对应柔性传动比的数学模型。
(1) 定义电机-泵的柔性传动比为:
(2)
(3)
电机-泵的传递效率:
(4)
式中, [ε(p,T′)]反映了泵控系统的负载能力;[ε(q,n)]反映了泵控的速度变化能力;η(a,b)反映了泵控系统的功率特性。
(2) 定义泵-液压缸的柔性传动比为:
(5)
(6)
(7)
泵-液压缸的传递效率:
(8)
(9)
(3) 定义电机-液压缸的柔性传动比:
(10)
(11)
电机-液压缸的传递效率:
(12)
3 电液伺服泵控系统柔性传动比
以电液伺服泵控系统的柔性传动比研究为例,在伺服电机输入转速和外负载力FL作用下,液压泵的流量连续性方程、液压缸流量连续性方程和负载的力平衡方程为:
(13)
式中,dp—— 定量泵排量
nm—— 电机输出转速
Ctp—— 液压泵泄漏系数
Ctc—— 液压缸泄漏系数
Ap—— 液压缸活塞有效面积
qL—— 液压泵输出流量
xp—— 液压缸活塞位移
βe—— 油液有效体积弹性模量
K—— 弹性负载系数
Bp—— 黏性阻尼系数
mt—— 等效质量
pL—— 负载压力
根据上述方程,当系统处于空载状态(FL=0)且不考虑黏性阻尼和弹性负载(Bp=0,K=0)时,得到系统的柔性传动比为:
(14)
式中,vp—— 电机输出转速
Ct—— 总泄漏系数(Ct=Ctp+Ctc)
其中,X6量纲为L。由式(14)可知,柔性传动比的影响因素有系统的泄漏系数、外负载力、有效体积弹性模量以及油液的黏度。
将柔性传动比概念应用到电液伺服泵控系统的压力控制中,伺服电机-泵的能量传递关系为:
(15)
式中,ηm—— 电机-泵的传递效率
T′ —— 电机输出扭矩
ω—— 电机输出转速
Δp—— 定量泵吸、排油口两侧压差
q—— 定量泵输出流量
将式(15)的表达形式扩展至描述液压缸活塞速度和伺服电机输出转速之间的关系,把伺服电机-液压缸之间的部分等效为广义定量泵的概念,则液压缸高压腔的输入流量等于伺服电机输出转速和广义定量泵排量的乘积,定义广义排量为Dg,其应用柔性传动比的表达式为:
(16)
基准扭矩Tb计算公式为:
Tb=pLDg
(17)
广义排量控制器通过给定压力与液压缸的速度反馈,计算得到基准扭矩Tb,压力偏差信号ep经PID控制器作用后得到扭矩的补偿值eT,两者相互作用,作为伺服电机的扭矩输入信号,实现对系统输出压力的精确闭环控制,电液伺服泵控系统中的压力闭环控制框图如图3所示。

图3 压力闭环控制框图
4 仿真与试验研究
电液伺服泵控系统试验台整体包括工装台架、液压系统、控制系统和软件,其整体外形如图4所示。

图4 电液伺服泵控系统试验台
4.1 系统组成
1) 液压系统
试验台的液压系统主要由动力单元、补油蓄能器、吸收压力脉动蓄能器、执行单元和安全卸荷模块等组成,其中动力单元是整个系统试验台的核心部分。
系统的动力单元为MOOG电动伺服泵控单元(Electrohydrostatic Pump Unit,EPU),该动力单元结合了机电和液压技术,具有高度集成、紧凑的优点,符合机电液一体化对于能源效率、环境清洁和高功重比的要求,其外形如图5所示。

图5 电动伺服泵控单元
EPU由伺服电机和定量泵组成,通过控制伺服电机的转速,调节系统中的流量和压力,其主要性能参数见表2。

表2 EPU主要参数
2) 电气控制系统
电气控制系统主要由上位机PLC、MOOG MSCII运动控制器、伺服驱动器和伺服电机组成,其结构框架如图6所示。

图6 电气框架示意图
4.2 软参数测量模型
在MATLAB/Simulink中建立基于柔性传动比控制策略的广义排量控制器模型,该模型考虑了系统有效体积弹性模量、动态泄漏系数以及油液黏度对柔性传动比的影响。通过模型的仿真分析来验证所提出的柔性传动比控制策略在阶跃响应和正弦响应下的控制性能。
为得到系统的泄漏系数、油液有效体积弹性模量及油液的黏度等软参量参数,应用伺服驱动软测量方法,其软参量测量模型框图如图7所示。定量泵的输出流量、输出压力由泵的输入转速、转矩及相关参数决定,其中转速可以通过伺服电机的编码器测得,转矩通过转矩电流和电机参数间接获得。泄漏系数是系统在低压低速工况时计算得到的,此时温度变化不大,对油液有效体积弹性模量和黏度影响很小,故忽略对流量的影响,只考虑油液的泄漏。系统的泄漏主要包括泵和液压缸的泄漏。

图7 软参量测量模型结构框图
泄漏系数可表示为:
(18)
式中,qt—— 泄漏量
Δp—— 高、低压腔两腔压差
泄漏量qt为输入流量的理论值和实际值的差值。其中,液压泵输入流量的理论值由实际转速和排量计算得出,液压缸输入流量的理论值由活塞杆有效面积和活塞杆的速度计算得出,活塞杆速度通过速度传感器测得。输入流量的实际值通过流量传感器测得,高、低压两侧压差Δp通过压力传感器测得。
油液的黏度和有效弹性模量是在高压低速工况时计算得到的。油液的黏度与温度和压力有关,其关系式为:
(19)
式中,ν—— 油液动力黏度
A,B,C—— 与液压油有关的系数
λ—— 黏压系数
T—— 油液温度
p—— 系统工作压力
其中,温度和压力通过传感器测得,液压油的黏压系数由油液的相关参数和种类决定。
液压油的有效体积弹性模量受油液体积及系统压力影响,具体关系式为:
(20)
式中,V—— 液压油的总体积
其中,油液的总体积通过流量和液压缸活塞运行到极限位置的时间计算得到,系统的工作压力通过压力传感器测得。
4.3 试验与仿真分析
1) 广义传动比特性
将系统仿真模型的采样周期设置为0.5 s,得到广义传动比If特性仿真曲线,如图8所示。

图8 广义传动比特性仿真曲线
由图8可以看出,系统的广义排量的变化是非线性的,在0.3 s之前系统流量提供液压缸活塞杆运动,在到达稳态之后系统流量用来维持系统的泄漏,这与实际工作情况符合。
2) 阶跃信号响应
在搭建好的仿真模型中,对系统施加从0~5 MPa的阶跃信号,采用广义排量控制方法和PID控制方法,同时观察液压缸高压腔实际压力与期望压力的跟随过程,如图9、图10所示。可以看出,基于传统PID控制难以调节出最优的参数,稳态误差比较大,达到±0.5 MPa;而基于柔性传动比的广义排量控制策略在跟随期望阶跃信号压力曲线时,有较好的响应特性,稳态误差达到±0.1 MPa,没有明显振荡。

图9 广义排量控制压力阶跃响应曲线

图10 PID控制压力阶跃响应曲线
3) 正弦信号响应
对系统施加从幅值为5 MPa的正弦信号,同时观察采用广义排量控制方法和PID控制方法时液压缸高压腔实际压力与期望压力的跟随过程,如图11、图12所示。可以看出,传统PID控制下压力滞后现象比较突出;而基于柔性传动比的广义排量控制策略在跟随压力正弦曲线时,表现出良好的跟随特性。
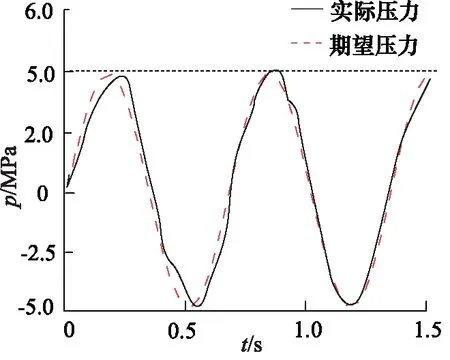
图11 广义排量控制压力正弦响应曲线
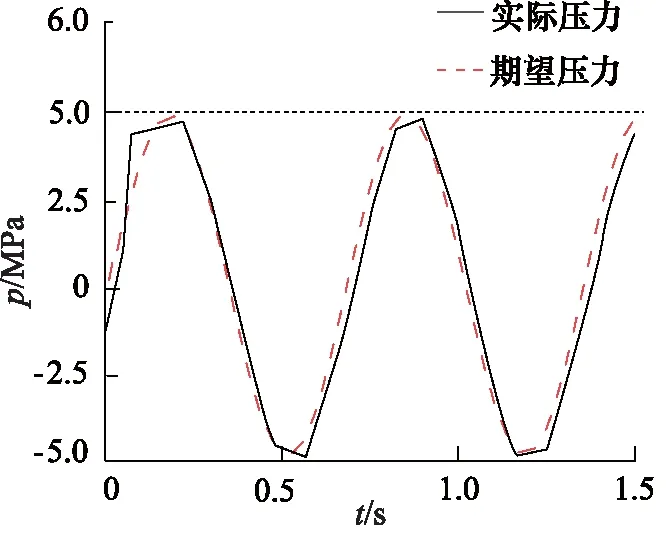
图12 PID控制压力正弦响应曲线
5 结论
针对电液伺服泵控系统柔性传动特性进行研究,通过理论研究和仿真试验分析,主要得到以下结论:
(1) 提出了电液伺服泵控柔性传动比理论, 得到伺服电机-定量泵-液压缸之间的柔性传动比规律;
(2) 对柔性传动比理论进行应用研究,提出了基于广义排量的压力控制策略;
(3) 对柔性传动比理论应用进行了仿真和试验研究,结果表明,柔性传动比理论的应用对压力控制具有良好的控制效果。
