基于能量耦合的欠驱动三维BC防摆控制
2021-11-17吴向明张启启宋晓明
吴向明,范 波,张启启,宋晓明
(河南科技大学信息工程学院,河南 洛阳 471023)
1 引言
欠驱动系统以其独立控制变量个数小于系统自由度个数的特性被广泛地应用于各个领域。桥式起重机作为典型的欠驱动控制系统,在短距离场地运输中发挥着重要的作用。
由于运行环境的要求,桥式起重机一般是由经验丰富的工人操作,但介于桥式起重机系统的高度非线性和控制量少等原因,给其控制带来了极大的挑战。这就导致桥式起重机系统普遍存在工作效率低下和安全性能不高等问题。为了提高桥式起重机系统的工作效率与安全性能,国内外许多学者对桥式起重机系统进行了大量的研究:Garrido等人[1]通过输入整形技术在特定脉冲序列对模拟信号进行卷积以减少负载摆动。董明晓等人[2]以基于载荷摆动幅值最小及优化时滞的思想设计最优输入整形器。Fang等人[3]从能量角度来增强台车与负载之间的动态耦合关系,使得桥式起重机控制性能得到了提升。马博军等人[4]设计了一种基于耗散理论的自适应控制器,实现了对整个桥式起重机系统的快速控制。Fang等人[5]构造一条S形定位轨迹,并设计自适应跟踪控制器消除负载摆动。
上述研究均以二维平面内的桥式起重机系统模型为基础展开,而在实际应用中,桥机和吊重多数情况下都在三维空间内运动。由于三维桥式起重机系统模型更接近实际桥式起重机,包含更多的状态量,且各个状态之间相互耦合,非线性更强,增加了吊重摆动控制的难度,因此其研究具有更大的实践价值。文献[6]中,孙宁等人设计了一种目标轨迹自适应控制器,虽然具有良好的控制性能和不错的适应性,但该方法应用时须进行参数在线估算。文献[7]中,Zhang等人通过引入两个新的复合信号,构造新的存储函数,设计跟踪控制策略,使得系统具有较好的暂态性能和较强的鲁棒性;文献[8]中,Sun等人通过引入虚拟有效载荷,分别对系统动能及势能整形,设计出一种能量耦合的输出反馈控制律,实现了小车精确定位和有效载荷摆动消除。虽然上述控制策略均有较好的定位和防摆控制效果,但是它们均过于依赖系统模型且控制器设计和分析较为复杂。
针对上述控制策略中过度依赖模型参数、控制方法复杂的问题,本文设计了一种基于能量耦合的三维桥式起重机防摆控制方法。首先,基于定绳长三维桥式起重机数学模型,分析系统能量,结合三维坐标系中台车与负载的耦合关系,建立基于负载空间位移误差的复合控制信号;然后,利用李雅普诺夫方法,获取能量耦合控制律,并通过LaSalle不变性原理证明系统的有界性与收敛性。最后,进行仿真验证,并与传统的PID控制及能量控制方法对比,说明该方法能够实现台车的定位与负载消摆,且具有更佳的控制效果;同时减少调节参数,降低模型参数依赖度,简化控制律。
2 三维桥式起重机模型分析
桥式起重机主要依靠大车、台车和吊绳的运动来完成对负载的挪移,由此建立桥式起重机的五自由度三维数学模型[9],其系统模型如图1所示。

图1 三维桥式起重机模型示意图
其中,Mx,My分别表示x,y方向上运动的等效质量(因为台车沿y方向运动时,导轨随之一起运动,所以Mx主要是(小车的质量)台车的质量,而My主要包括台车和桥架的质量);θx表示吊绳在xoz平面上的投影与z轴负方向所成的夹角,θy表示吊绳与xoz平面的夹角;l表示摆绳长度;m表示负载的质量;fx,fy分别表示沿x,y方向上的力;(xm,ym,zm)表示负载质心坐标。
对于固定绳长的三维桥式起重机系统而言,其动力学模型可描述如下[10,13,14]
mlxcosθxcosθy-mlysinθxsinθy-

(1)

(2)


(3)

(4)
由图1可知,负载的水平位置信号可表示为
xm(t)=x+lsinθxcosθy
ym(t)=y+lsinθy
(5)
将式(5)关于时间t求导,可得
(6)
根据实际运行情况,负载摆角θx(t),θy(t)∈(-π/2,π/2),负载的水平位移包含台车位置与负载摆角的耦合信息,为控制器的设计提供条件。
3 能量耦合控制器设计
3.1 系统无源性分析
根据桥式起重机的动力学模型,该系统能量可以表示为

(7)
对式(7)关于时间t求导并整理可得[11,12]

(8)



(9)


(10)
对式(10)关于时间t求积分,可得
E1(t)=E(t)+Edx(t)+Edy(t)=E(t)+Ed(t)
(11)


(12)
将式(3)和(4)代入式(12)整理可得


(13)
对式(13)关于时间t求积分有
Edx=-l(Mx+m)



(14)
对式(14)关于时间t求积分有
则
Ed(t)=Edx(t)+Edy

(15)
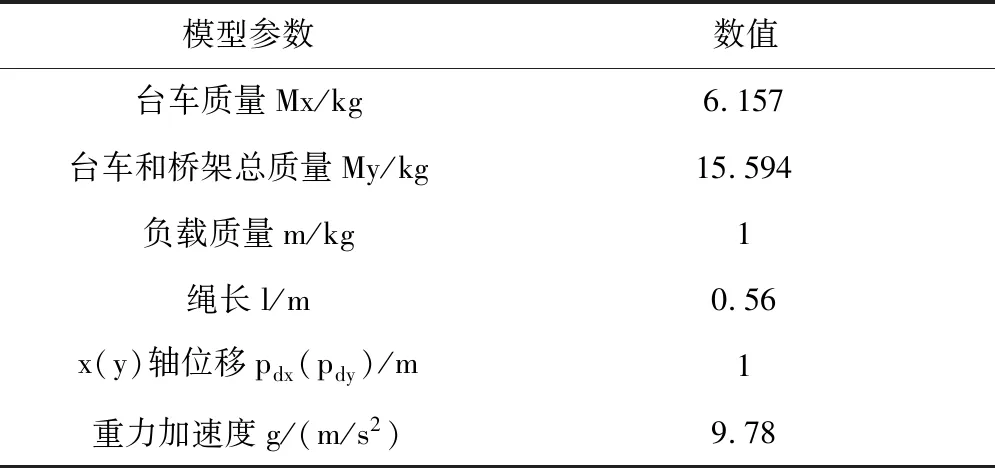
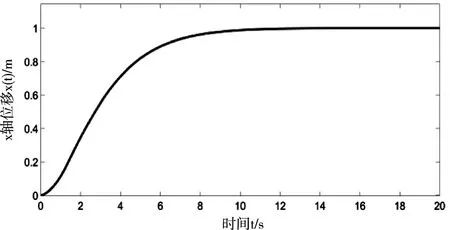
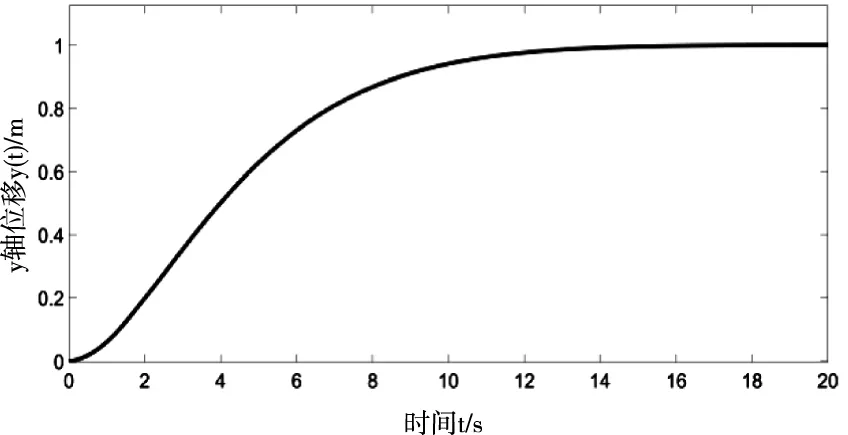
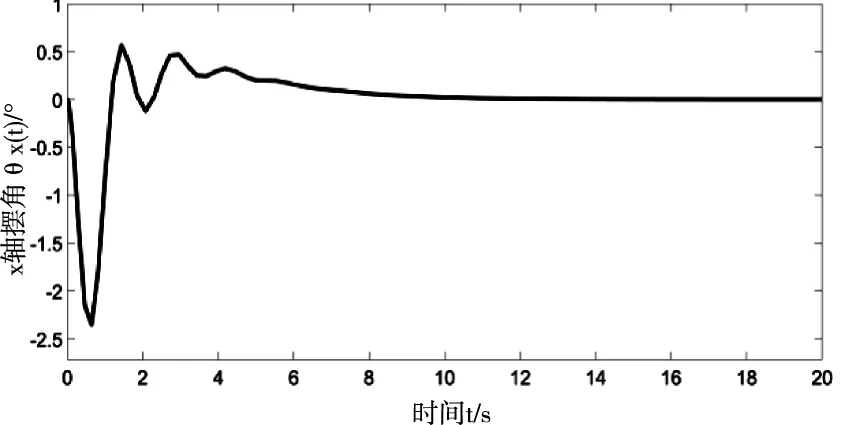
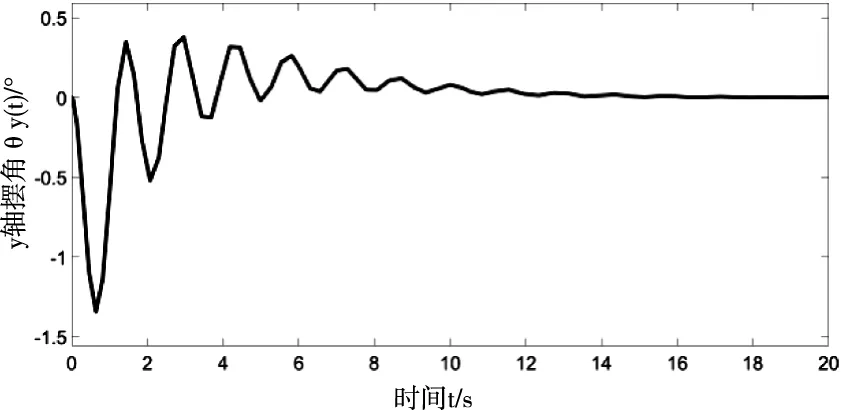
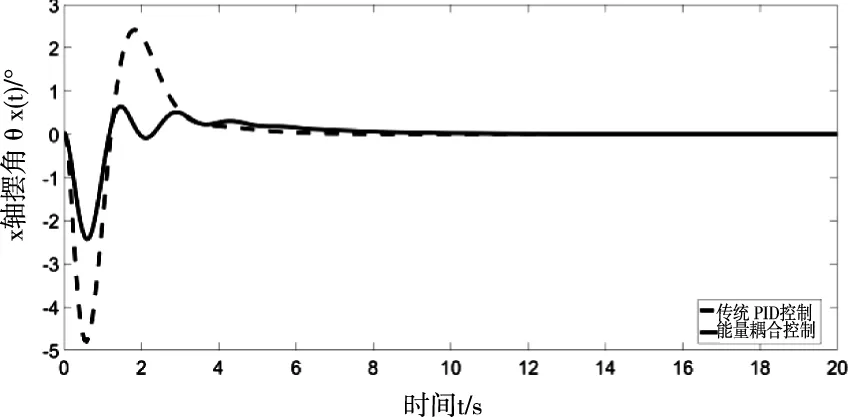
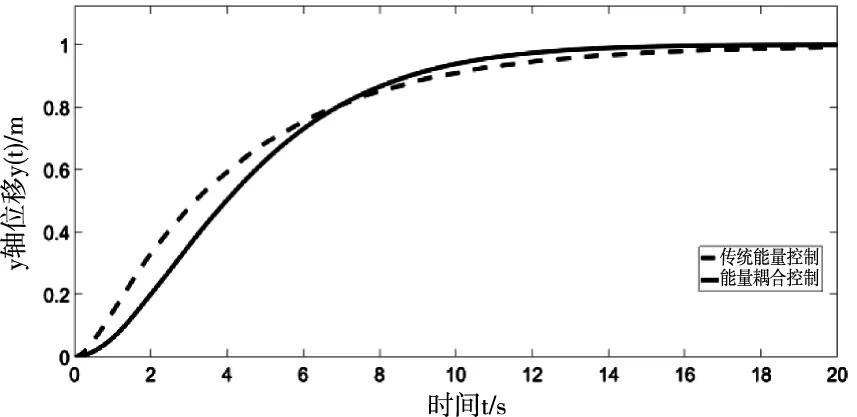
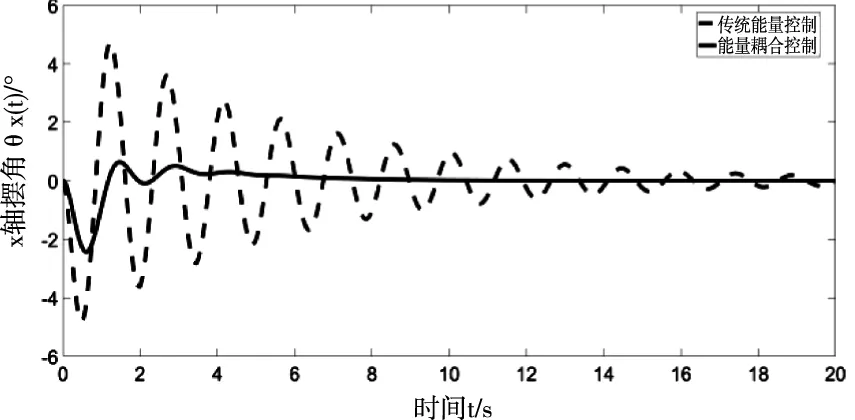
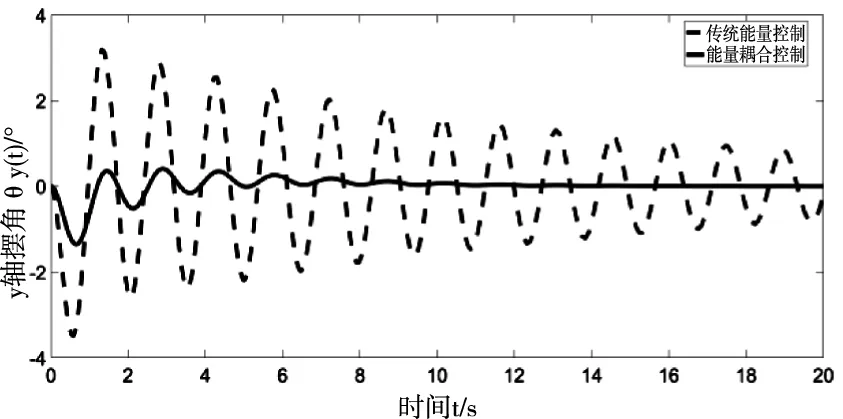
因为Mx -gl(Mx+m)(1-cosθxcosθy) (16) 令 由于θy(t)∈(-π/2,π/2)⟹cosθy>0,可得如下结论 将式(7)、(15)代入(11)并整理可得 E1(t)=E(t)+Edx(t)+Edy(t)=E(t)+Ed(t) ≥0 (17) 从E(t),Ed(t)正定性可知,式(17)中新型储能函数E1(t)也为正定。 桥式起重机的控制的目标是在时间t1内台车到达指定位置pdx、pdy,同时有效抑制并消除负载摆动,即 负载水平运动的定位误差信号εx(t)与εy(t)为 εx(t)=xm-pdx=ex+lsinθxcosθy εy(t)=ym-pdy=ey+lsinθy (18) 式中,ex(t)=xm(t)-pdx,ey(t)=ym(t)-pdy分别为台车在x,y方向上的定位误差。 选取李雅普诺夫候选函数 (19) 式中kpx>0,kpy>0。 对式(19)求导,可得 (20) (21) 其中,kdx>0,kdy>0。 台车在耦合控制方法(21)作用下,可迅速到达目标位置,并有效地消除负载摆动,即 由式(20)、(21)可知 (22) 所以V(t)为减函数且V(t)>0,因此V(t)有界。由式(18)、(19)及(21)知 (23) (24) 进一步可知 εx(t)=ex+lsinθxcosθy=A εy(t)=ey+lsinθy=B (25) =0 (26) (27) 其中,A,B为待定常数。则由式(21)、(24)、(25)可得在集合Ψ中 fx(t)=-kpxA,fy(t)=-kpyB (28) 将式(26)、(27)重新整理可得 (29) (30) 将式(1)、(2)整理可得 (31) (32) 结合式(28)、(29)、(30)、(31)、(32)可得 (33) A=0,B=0 (34) 结合式(25)、(28)、(33)可知,在集合Ψ中 εy(t)=0,fx(t)=0,fy(t)=0. (35) (36) (37) 将式(35)、(37)代入式(3)和式(4),可求得 gsinθxcosθy=0 gcosθxsinθy=0 (38) 又因为cosθx>0,cosθy>0,有 θx=0,θy=0 (39) 假设a≠0,b≠0,结合式(25)、(34)、(36)可得sinθxcosθy=-a/l≠0,sinθy=-b/l≠0,与式(39)的结论相矛盾,由此可知a=0,b=0。由式(36)得 ex(t)=0,ey(t)=0 (40) 综上,由式(36)、(37)、(39)、(40)结论可知,最大不变集Ψ仅包含平衡点。根据LaSalle不变性原理[15],基于负载能量耦合控制律(21)能够满足台车到达指定位置并消除负载摆动。即 基于MATLAB/simulink仿真平台验证上述基于能量耦合控制器消摆性能。仿真模型参数,见表1。仿真结果,如图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13所示。 表1 仿真模型参数表 图2 能量耦合控制x轴方向位移变化曲线 图3 能量耦合控制y轴方向位移变化曲线 图4 能量耦合控制x轴方向摆角变化曲线 图5 能量耦合控制y轴方向摆角变化曲线 图2、图3中,台车在x轴方向和y轴方向均能到达指定位置。但y轴方向总质量更重,到达指定位置时间耗时更长。 图4、图5中,台车在x轴方向和y轴方向均能实现消摆功能。但y轴方向总质量更重,产生的摩擦更大,且相比于x轴方向y轴的耦合情况更为复杂,受到外界干扰更多,因此y轴方向产生的残余摆动更难消除。 图6 能量耦合与PID控制x轴方向位移变化曲线 图7 能量耦合与PID控制y轴方向位移变化曲线 图8 能量耦合与PID控制x轴方向摆角变化曲线 图9 能量耦合与PID控制y轴方向摆角变化曲线 图6、图7中,与传统PID控制相比,能量耦合控制在台车定位方面消耗的时间更长,但能量耦合控制在位移变化前段和后段台车加速度变化更加平缓,负载运动时产生的摆动相对更小,使桥式起重机操作更加安全。 图8、图9中,能量耦合控制与传统PID控制均能在短时间内完成负载消摆,两者在消除负载残余摆动方面效果相差无几,但能量耦合控制在抑制负载摆角上具有更好的控制效果。 图10 能量耦合与传统能量控制x轴方向位移变化曲线 图11 能量耦合与传统能量控制y轴方向位移变化曲线 图12 能量耦合与传统能量控制x轴方向摆角变化曲线 图13 能量耦合与传统能量控制y轴方向摆角变化曲线 图10、图11中,与传统能量控制相比,能量耦合控制具有更好的位移曲线,能够更快的实现台车定位。能量耦合控制在位移变化前段台车加速度变化更加平缓,负载运动时产生的摆动相对更小,位移变化后段具有更加迅速的定位效果,在指定位置附近能够迅速定位。 图12、图13中,传统能量控制负载摆动时产生较大的摆角且负载残余摆动较为强烈,不能在短时间内完成负载的消摆工作。而负载能量耦合控制在抑制负载摆角,消除残余摆动方面均具有良好的控制效果。 通过仿真结果对比分析可知,该方法能够在桥式起重机运行过程中有效抑制负载摆动,实现台车准确定位;与传统PID控制和传统能量控制相比,能量耦合控制能够有效抑制摆角并且对残余摆动有一定程度的消减,具有更好的消摆效果。 针对欠驱动三维桥式起重机防摆控制问题,本文通过分析三维桥式起重机系统能量,构建负载空间位移误差信号,利用李雅普诺夫方法,设计了基于能量耦合的定绳长三维桥式起重机防摆控制方法,并对控制器的性能进行了严格的理论分析。通过仿真对比,验证了该方法能够实现台车定位与负载有效消摆。在未来的工作中,将考虑提升台车的快速定位性能,以获得更好的控制效果。

3.2 能量耦合控制器设计




3.3 控制器稳定性分析
















4 仿真结果及分析




5 结论
