进近着陆阶段自动飞行工作模式设计与仿真
2021-11-17樊智勇张文林
樊智勇,王 飞,刘 涛,张文林
(1.中国民航大学工程技术训练中心,天津 300300;2.中国民航大学电子信息与自动化学院,天津 300300)
1 引言
自动飞行系统包括自动驾驶、飞行指引等功能,其提供飞机目视飞行导引和飞机横向、垂直、多轴及自动油门的自动飞行导引工作模式[1-2]。在不同飞行阶段,为完成自动驾驶,飞行员需要预位及接通不同的工作模式,使飞机自动或手动地完成预定飞行任务。飞机进近着陆阶段是整个飞行过程的关键阶段,在此阶段其模式转换的条件较为复杂,且模式存在部分耦合情况[3-4]。因此,研究飞机在进近着陆阶段工作模式的转换具有重要的意义,也为飞机飞行全过程自动飞行系统工作模式的完整设计提供了重要参考。
本文拟对大型客机进近着陆阶段自动飞行工作模式开展设计与仿真研究。以仪表着陆系统(ILS)引导飞机进近着陆过程分析入手,展开对大型客机进近着陆阶段自动飞行工作模式设计方法的研究,完成进近着陆过程工作模式转换状态模型设计,之后基于MATLAB/Stateflow建立进近着陆阶段的工作模式转换状态模型。最终通过设定的完整进近着陆过程和着陆复飞过程完成模式的转换验证。
2 进近着陆过程及模式分析
2.1 进近着陆分析
目前,全球民用机场主要使用无线电导航系统引导飞机安全着陆,国际范围内民用航空主要以ILS的应用最为广泛[5-6]。本文即以ILS引导飞机着陆为例,分析研究飞机在ILS导航下进近着陆过程各工作模式的运行及转换情况,再对进近着陆阶段不同着陆情况下工作模式的转换进行验证。
进近着陆从规定的航线开始,到着陆完成或因突发情况而转向复飞程序,在其不同阶段为完成进近着陆功能需要多种工作模式的共同配合[7]。飞机进近着陆期间,飞行员通过手动选择可预位或者接通指定工作模式,在遇到不符合标准进近着陆程序的时候,自动飞行系统也会自动接通能有效避免不安全事件或飞行事故发生的工作模式,从而修正进近着陆程序,在整个进近着陆阶段,所涉及的工作模式较为繁多复杂。所以此阶段是大型客机自动飞行系统工作模式的一个综合体现,能充分凸显其工作模式的设计规范和性能。
大型客机从进近、下滑、对准跑道、拉平到接地、低机头、滑跑的整个进近着陆过程都有着严格的程序和使用标准,这一系列规范规定的标准也给飞机自动着陆的模式转换控制提供了条件[8]。飞机在飞行过渡层开始进近程序,典型的进近着陆过程如图1所示。

图1 飞机典型进近着陆示意图
2.2 进近着陆模式设计分析
大型客机进近着陆主要包含从进场航段到着陆以及偶遇突发事件转为复飞模式两种情况,其中还包含对遭遇风切变时飞机的应急转换模式。本设计在充分考虑飞机进近着陆全过程下将工作模式按照垂直模式、横向模式、多轴模式和自动油门模式分别进行设计。
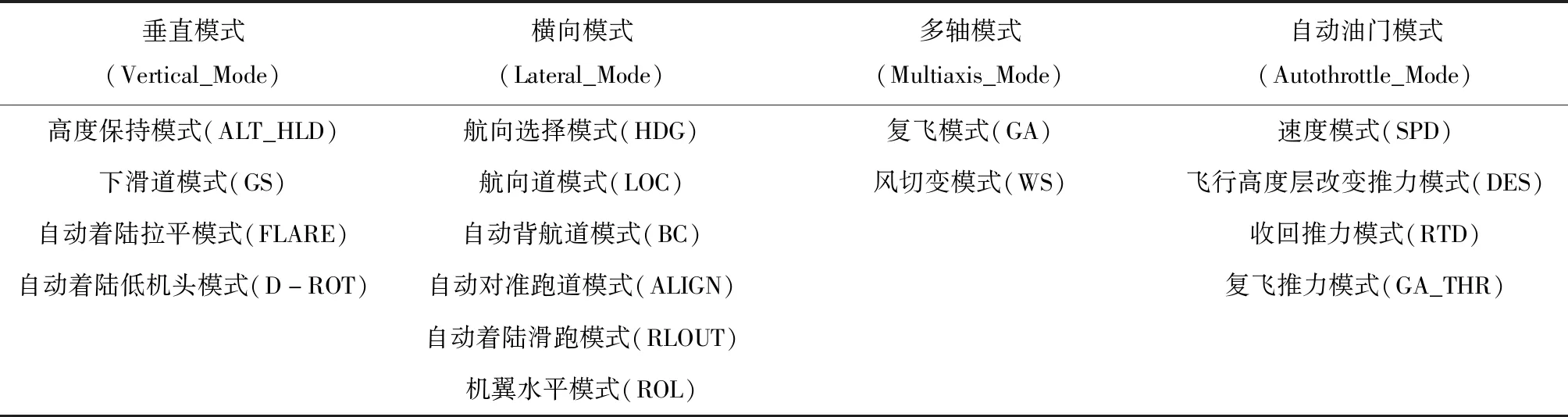
表1 飞机进近着陆阶段工作模式表
为保证进近着陆任务的完成,自动飞行系统应根据飞行计划,完成航向控制、飞行高度控制和速度控制,同时遇到突发情况还要考虑复飞模式,该功能由自动飞行系统各工作模式共同协调完成。以下滑道模式(GS)为例,其功能及转换设计分析如下:
飞机进近着陆时需要沿着一定的下滑轨迹下滑,GS模式的目标即为捕获和跟踪下滑信号,导引飞机下滑,GS模式分为预位和接通两种情况,同时与LOC模式也存在一定耦合。其工作模式转换关系为,飞机在选择进近之后GS模式
即处于预位状态,同时飞机在捕获航向道之前,GS模式也是受抑制的,只有待LOC模式激活且下滑道捕获后,垂直模式才会更新并输出GS模式,进而引导飞机跟踪下滑道信号下滑。
飞机进近着陆阶段垂直模式主要完成飞机从初始进近到飞机低机头完成着陆的整个垂直方向上的飞行控制,同时配合横向、多轴和自动油门模式可实现飞机的精密进近着陆。其中垂直模式和横向模式以及自动油门模式存在多数耦合情况,采用以上分析设计方法可分别再完成横向模式、多轴模式和自动油门模式的设计分析。
3 进近着陆模式转换仿真设计与实现
大型客机进近着陆阶段的自动飞行过程由若干种工作模式组成,通过各工作模式之间的复杂逻辑转换完成进近着陆各阶段的功能需求。因而设计稳定可靠并且考虑全面的工作模式转换逻辑是研究自动飞行系统的重要基础。工作模式的转换逻辑本质上是一个包含状态、输入和输出的离散事件模型[9]。
3.1 工作模式转换逻辑设计
离散事件模型通常可采用有限状态机来进行建模,有限状态机可以适应非常复杂的状态管理,并且状态间的关系可以直观看到。在模式转换逻辑设计中,工作模式即为状态,在某些事件发生时,状态机可以实现从当前工作模式到另一输出更新工作模式的转换,且转换条件可视化,便于修改维护[10]。飞机模式转换逻辑设计结构如图2所示。
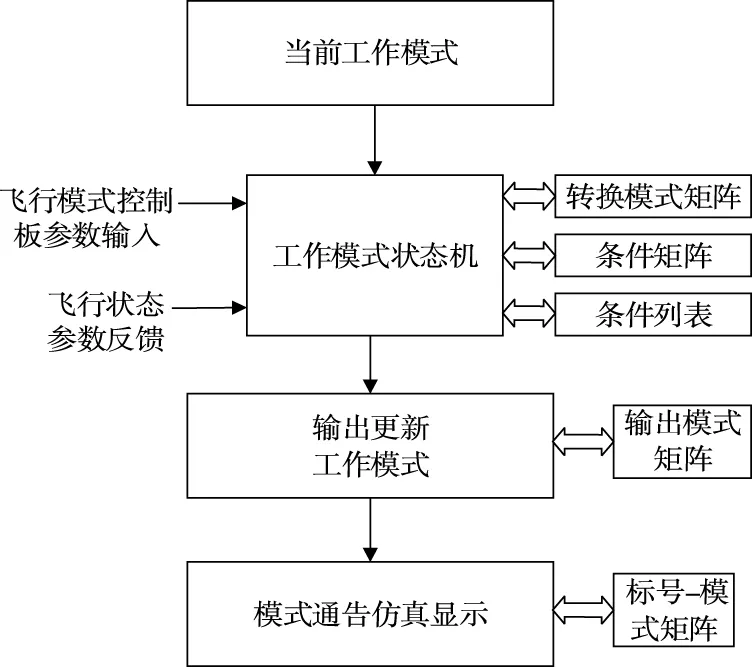
图2 模式转换逻辑设计结构
工作模式状态机接收飞行模式控制板(FMCP)参数输入,转换模式矩阵提供了飞机可能存在的转换模式,根据当前工作模式及输入寻找模式转换。设矩阵A=(ai1)m×1,矩阵B=(b1j)1×m,A、B表示模式的一个集合且A、B互为转置矩阵,则其转换模式矩阵C=(cij)m×m表示为
Cm×m=Am×1B1×m=ai1b1j(i=1,2…m;j=1,2…m)
(1)
式中ai1b1j即表示转换模式矩阵中第i行第j列的元素值,元素值有0和1两种可能,0表示无模式转换,1表示存在模式转换情况。
工作模式状态机除了寻找转换模式矩阵还需从条件矩阵中查询确定转换模式的具体转换状态。条件矩阵P=(pij)m×m也是一个m×n的方阵,其中任一元素pij与转换模式矩阵中的元素cij是一一对应的,且矩阵P的元素有0、1、2三种状态,0表示的是A模式到B模式无转换可能,1表示A模式转换到B模式需先转换到其对应的预位模式,2表示A模式到B模式的转换为同一模式的预位到激活的状态转换。
当确定了转换模式后,状态机会从条件列表中找出转换到该模式的转换条件。条件列表表示如下表2。
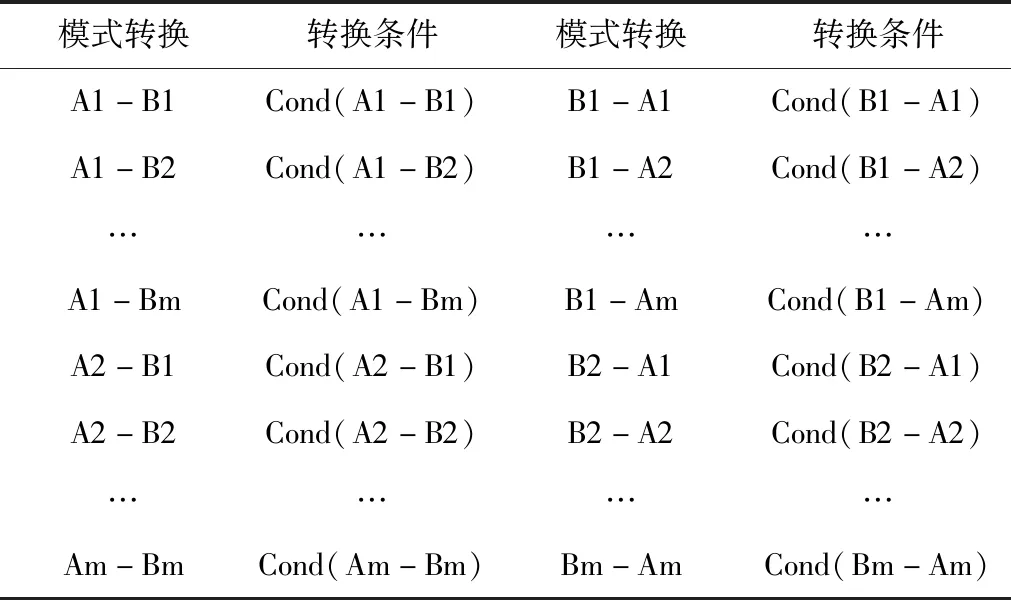
表2 模式转换条件列表
转换条件确定后再结合飞行状态参数反馈需要对条件进行评估,评估正确即可完成当前工作模式的更新。评估目的为判断飞机当前飞行状态是否与模式的转换相匹配,如飞机在需要复飞时,而实时高度参数反馈数据已低于决断高度,则条件评估不通过,模式无法转换。

模式的转换逻辑具有复杂耦合特性,在模式转换模型设计中,可将全过程工作模式由若干个状态构成组合状态进行描述,由状态动作来代表飞行模式描述的行为,并且与对应飞行控制律相匹配,输出更新工作模式后原模式会变成非活动状态。模式转换有两种触发方式,一种为驾驶员操作FMCP触发,另一种为先预位,待来自各类机载系统及相关状态传感器检测的离散型和连续型输入参数满足条件后自动转换。模式转换流程如图3。

图3 模式转换流程
3.2 工作模式转换模型实现
参考进近着陆阶段各工作模式以及模式转换逻辑设计,按照模式转换设计方法及流程完成进近着陆全过程飞机工作模式状态转换模型设计。在正常进近着陆情况下,飞机主要根据当前的飞行状态参数(如高度、航向偏差角等)以及飞行员的FMCP操作输入来完成飞机工作模式的手动和自动转换;当遇到突发情况且满足复飞条件时飞行员会操纵飞机使其转为复飞模式,且有风切变告警信号发出时,飞机也会自动激活WS模式。
飞机进近着陆阶段垂直及多轴模式设计主要由ALT_HLD模式、GS模式、FLARE模式、D-ROT模式、TOGA模式和WS模式组成。首先,将上述六种模式组成一个转换模式矩阵,如表3,0表示不存在纵向的模式到横向的模式的转换,1表示存在模式转换。转换模式对应的条件矩阵如表4,0表示不存在模式转换的条件,1表示纵向的模式转换到横向的模式时需要先转换到横向的预位模式,2表示当前工作模式分为预位和激活两种状态且模式转换过程为从预位模式转换到激活模式。

表3 垂直及多轴模式转换矩阵

表4 垂直及多轴模式条件矩阵
当飞机确定了模式转换后需通过列出的条件列表找出对应模式转换条件从而完成输出更新工作模式,条件列表部分模式转换条件如表5所示。
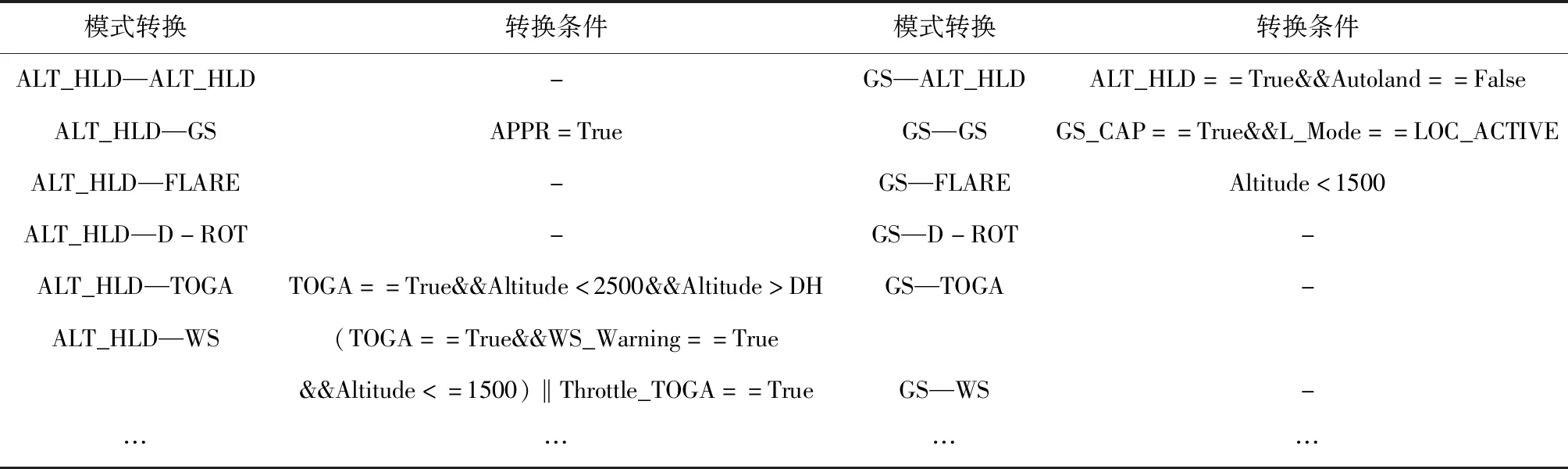
表5 垂直及多轴模式条件列表
输出模式矩阵为六种工作模式和对应控制率的一个集合,输出更新的工作模式会从中调用控制率。因为输出的工作模式为数学标号,所以需要通过仿真显示来完成真实的模式通告,标号-模式矩阵的功能即为将模式进行输出显示。完成所有模式转换可构成飞机垂直及多轴模式状态转换模型如图4。
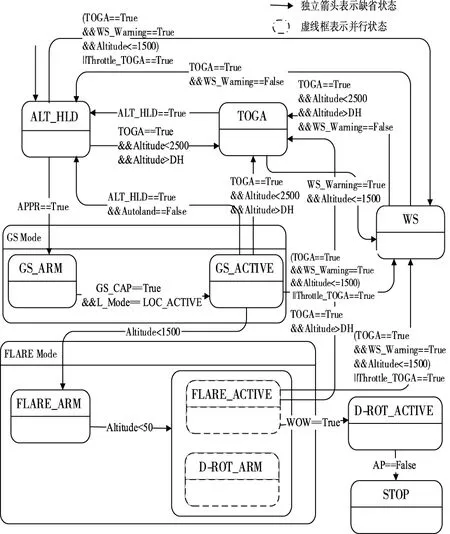
图4 垂直及多轴模式状态转换模型
上图进近着陆过程其缺省工作模式为ALT_HLD。选择APPR后,GS转为预位模式,当捕获到下滑道时,GS模式自动激活,垂直工作模式转换为GS模式,预位模式清除,飞机此时会沿下滑道下降。飞机下降到无线电高度1500英尺以下时,FLARE模式预位。高度低于50英尺后,工作模式转换为FLARE模式,FLARE预位模式清除,D-ROT模式预位接通,飞机开始柔和接地。主起落架接地后,为使飞机前轮着地,以完成在跑道上的滑跑,D-ROT模式工作。在整个进近着陆阶段,当飞机遭遇突发情况且满足复飞条件时选择TOGA会使飞机转为多轴模式下的复飞模式,同时在下降时探测到风切变告警并且满足高度要求时也会立即转向WS模式。
参考垂直及多轴模式转换设计完成飞机横向模式状态转换模型如图5。进近着陆阶段,其缺省工作模式为HDG模式,指令飞机以保持FMCP上选择的航向,此时无其它横向模式预位。当飞行员从FMCP上选择了APPR后,飞机开始进近。飞机根据当前的航向和目标航向之间的航向道偏差(CD)是否大于105度,进行LOC或BC模式预位,满足合适的航向道捕获标准,LOC模式或BC模式工作。工作之后GS也相继捕获,飞机开始下降,当高度下降到无线电高度1500英尺,为保证精密着陆,此时飞机需要使机头对准跑道中心线,ALIGN模式会自动预位。着陆过程当侧风要求偏流角大于5度时,在500英尺ALIGN模式即会接通,并开始建立5度的侧滑以减小偏流角,保持此形态直到接地,飞机会以最小5度的偏流角接地。而侧风要求偏流角小于5度时,降到200英尺ALIGN即工作。飞机承重接地后,RLOUT接通,用以提供航向道中心线滑跑引导。如果进近过程中飞机转为复飞或者风切变模式时,则ROL模式会取代当前任一预位或者接通的横向模式。

图5 横向模式状态转换模型
全过程自动油门模式状态转换模型如图6。此过程飞机自动油门的缺省工作模式为SPD模式,这也是自动油门的基本控制模式。当飞机截获到下滑道开始下滑时,自动油门转换为DES模式,以用于满足飞机在进行高度下降时的推力要求。飞机下降到无线高度150英尺后,并且不在GA模式时RTD模式自动预位,在拉平机动后激活。该模式工作后飞机自动调整油门杆到慢车位准备着陆,待飞机着陆D-ROT模式工作后,飞机断开自动油门。在此前任一阶段,若人为断开AT,则自动油门模式失效,飞机油门转为手动设置。若转为GA模式,则对应GA_THR模式会自动激活。
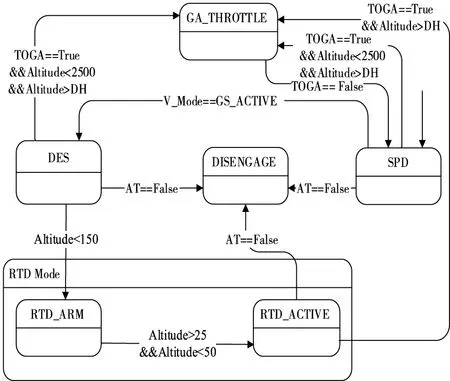
图6 自动油门模式状态转换模型
上述自动飞行工作模式状态机模型将复杂的飞机自动飞行模式转换控制逻辑分解成有限个稳定状态,针对预位和接通模式的耦合情况通过组合状态来进行描述,而对于垂直模式和横向模式以及自动油门模式之间的耦合,在转换到耦合模式时附加与之耦合模式的耦合条件,如在GS模式接通的条件中附加LOC模式接通。用状态动作来代表飞行模式所描述的行为,并结合条件可视化的特点,完成了对模式转换条件冲突的抑制。
4 模式验证
飞机进近着陆飞行情况可分为正常进近着陆以及着陆复飞,利用Stateflow可完成进近着陆各情况下自动飞行系统横向模式、垂直模式、自动油门模式及多轴模式的转换逻辑模型设计和仿真验证[11-12]。
4.1 进近着陆过程验证
模拟正常进近着陆过程为:飞机初始飞行在ALT_HLD和HDG模式下,此时高度接近6000英尺,之后按下APPR电门,飞机以90度的航向道偏差(CD)开始进近,相继捕获LOC和GS,飞机开始下降,高度变化来源于真实飞机QAR数据,着陆过程飞机侧风要求偏流角(DA)为10度,整个进近着陆过程飞机自动飞行模式转换仿真验证如图7。
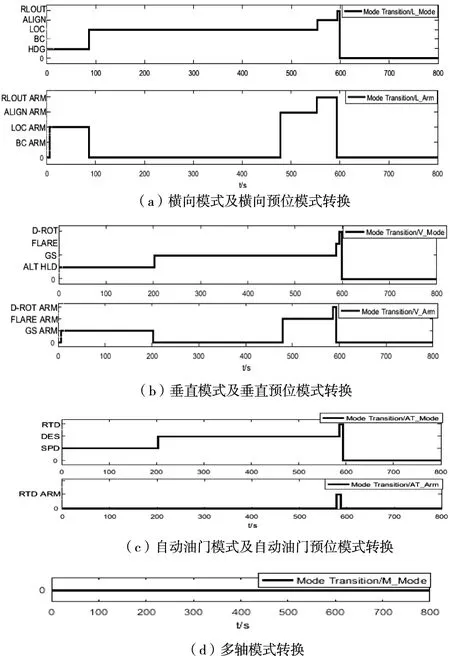
图7 进近着陆Stateflow仿真结果
根据图7中(a)-(d)仿真验证模式输出并结合输入和模式仿真显示模块可得正常进近着陆各工作模式输出通告对比图如图8。以下通告图从左至右依次为飞机的自动油门模式、横向模式和垂直模式或多轴模式通告,第二行为预位模式通告。

图8 进近着陆仿真模式通告对比
综合分析上图7和8可知飞机初始默认飞行模式为ALT_HLD、HDG、SPD。5秒后,APPR接通,飞机开始进近,此时LOC和GS预位模式接通。在86秒时,飞机截获到LOC,LOC模式激活,飞机开始沿跑道方向进近。到202秒后,下滑道截获,GS模式接通,同时自动油门模式转为DES。飞机继续下降,到1500英尺时,ALIGN和FLARE模式自动预位,在大约555秒时,ALIGN模式接通,RLOUT自动预位,到581秒时,RTD也自动预位。之后高度下降到50英尺后,RTD和FLARE从预位模式自动转为激活模式,并且D-ROT预位。593秒时,飞机承重接地,自动油门(AT)断开,RLOUT和D-ROT从预位状态自动激活,5秒后自动驾驶(AP)断开。整个过程模式输出及转换结果无混淆,耦合模式转换正常,转换条件无冲突。
4.2 着陆复飞过程验证
飞机着陆复飞过程为:飞机在正常进近至FLARE模式工作后,遭遇突发情况,飞行员按下TOGA按钮使飞机转为复飞模式,飞机逐渐上升,待爬升到2500英尺左右无线电高度后飞行员选择ALT_HLD、HDG模式,准备下一次进近。其模式转换验证图如图9,输出通告如图10。

图9 着陆复飞Stateflow仿真结果
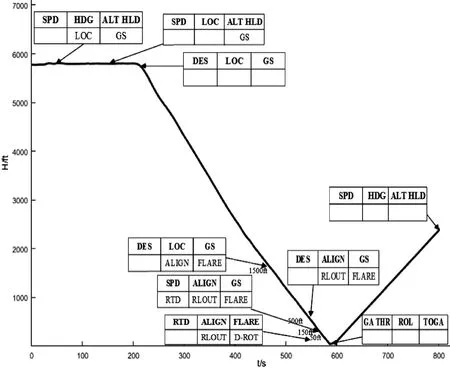
图10 着陆复飞仿真模式通告对比
根据以上模式转换验证图及模式通告图可知飞机在588秒之前飞行工作模式同正常进近着陆一致。在588秒时,飞机转为GA模式,同时横向模式转换为ROL模式,自动油门自动转换到GA_THR模式,飞机迅速爬升。之后在飞机爬升到2500英尺左右高度时,GA模式断开,HDG模式、ALT_HLD模式和SPD模式接通。总体来看,当发生突发情况时,飞机可准确无误转换到复飞模式,且无条件冲突。
通过上述飞机在正常进近着陆以及着陆复飞的模式转换验证,并由模式仿真图分析可得飞机能稳定无误的在进近着陆阶段完成垂直、多轴、横向及自动油门的模式转换,且能实时反映出各模式的预位及接通情况,包括对突发情况的应急复飞模式,同时也充分说明了此阶段模式设计的正确性。
5 结束语
本文在针对进近过程分析的基础上开展对大型客机自动飞行工作模式的研究,根据模式及模式转换设计,完成飞机进近着陆全过程工作模式转换状态设计。再基于Stateflow工具实现模型搭建,最后通过模拟设定飞机正常进近着陆以及着陆复飞过程完成模式转换的仿真验证。通过本设计可实时发现并修正模式转换中存在的条件冲突、模式耦合情况等相关设计问题。此外,本设计针对进近着陆全过程完成了详细的模式设计,充分考虑不同下降阶段不同状态参数输入时的功能模式。后续研究可以此设计为基础针对不同机型建立飞行全过程飞行工作模式模型,并结合飞机完整飞行动力学模型开展飞机自动飞行系统相关研究。
