一种改进的彩色遥感图像边缘检测算法研究
2021-11-17韩佳雪汪西原张文坤
韩佳雪,汪西原*,2,张文坤
(1. 宁夏大学物理与电子电气工程学院,宁夏 银川 750021;2. 宁夏沙漠信息智能感知自治区重点实验室,宁夏 银川 750021)
1 引言
彩色遥感图像的颜色空间复杂、信息量大,且边缘亮度与色度差别较大,其边缘轮廓中包含的信息更多,对彩色遥感图像作精确的边缘检测有需求和实际意义。遥感图像中边缘细节信息和噪声相当于高频信号,纹理区域相当于中频信号,平滑区域像素值起伏不大,即为低频信号。常见的彩色图像边缘检测方法:一是基于梯度的图像边缘检测,包括传统边缘算子的扩展,如Sobel[1]、LOG[2]、Canny[3]、Prewitt等。但Prewitt算子适用于噪声低的图像,Sobel算子能够平滑噪声,但在一定程度上也对边缘产生较宽的响应,边缘定位不够准确,会出现漏检。LOG算子对噪声敏感,抗噪性能较弱,而Canny算子会出现边缘独立的情况。另外还包括通过形态学算子来求取梯度,王益艳[4]等人提出了一种联合K-means和形态学算子的图像边缘检测方法,通过该方法可以准确定位边缘,但无法剔除噪声对边缘的影响;二是基于彩色信息区分度的彩色图像边缘检测,孙玉红[5]等人为保留彩色图像中的更多信息,先利用色彩对比最大化的方法灰度化彩色图像,在此基础上再作边缘检测,该方法在实验中表现良好,不再简单的受制于传统的边缘定义[5],但该方法的抗噪性有待提高;三是可以将原始彩色图像所在的颜色空间转换为更适合图像处理属性的另一种颜色空间,再作边缘检测。目前,有多种不同类型的颜色空间,如:HSI[6]、 HSV、 XYZ、 Lab等,张鑫鑫[6]作者提出一种基于HSI的球型颜色模型,但该方法不适用于彩色遥感图像,会造成遥感图像边缘信息丢失。
针对上述边缘定位不准确[1]、边缘独立[3],抗噪性能差[2,4,5]以及边缘信息丢失[6]等问题,本文提出一种针对彩色遥感图像边缘检测的算法:首先设计一种新的分数阶微分掩模模板,把模板应用到Canny算子中,即用分数阶微分代替Canny算子中的一阶微分来求取图像的梯度,获得图像边缘信息。在此过程中引入高斯曲率滤波来获得算法的最优参数同时消除彩色遥感图像中的噪声并抑制噪声的非线性放大。通过这种改进算法不仅可以增强彩色遥感图像中容易被忽视的细节信息,还可以精确地检测到图像边缘,并提高算法的抗噪性能。
2 改进的彩色遥感图像边缘检测算法
经实验研究和分析表明,Canny算子是在基于梯度的边缘检测方法中最有效的算子,能够有效的定位图像边缘;分数阶微分对彩色遥感图像中的复杂纹理和弱边缘部位能够最大程度的被保留。所以将Canny算子加以改进,用分数阶微分替换Canny算子中的一阶微分,找出图像的实际边缘、剔除伪边缘。但在边缘检测的过程中,噪声一般属于高频信号,会被非线性扩散和增强,影响到边缘检测的精度,因此引入高斯曲率滤波理论,在消除和抑制噪声的同时,保留图像更多的边缘和纹理信息。
2.1 分数阶微分掩模的构造
对∀α∈R,令其整数部分为[α],若信号s(t)在区间[a,t](a

(1)

(2)

(3)
定义f(x,y)在两坐标轴x与y轴上的前n项差分近似表达式,取其前n项的和分别作为f(x,y)在x和y轴上分数阶偏微分的近似值,得到式(4)和(5),再用卷积表示得到式(6)和(7),分数阶微分算子的掩模为式(8)


(4)


(5)

(6)

(7)
(8)
杨柱中[7]等人根据传统的Grumwald-Letnikov(G-L)分数阶微分定义,拓展为二维掩膜,从而推导出了Tiansi算子。二维数字图像信号中x和y的持续周期分别为x∈[x1,x2]和y∈[y1,y2],对图像的微分运算从八个方向进行,在0—360度之间,以45度为间隔得到八个方向。根据式(3)的前n项系数和式(8)分数阶微分掩模可以得到

(9)
依据式(9)可获得不同尺寸的模板。本文考虑到彩色遥感图像的属性、模板复杂度以及边缘检测效果,选用掩模的尺寸大小为5*5,如图1所示。

图1 分数阶微分掩模模板
2.2 基于分数阶微分和Canny算子的彩色遥感图像边缘检测算法的实现
基于分数阶微分和Canny算子的优化彩色遥感图像边缘检测算法的实现步骤包括以下7步:
1)将彩色遥感图像分为R、G、B三个分量;


(10)
(11)
3)根据式(11)确定的边缘方向,将其分为0°,45°,90°和135°四个方向;
4)通过非最大抑制方法处理梯度图像;
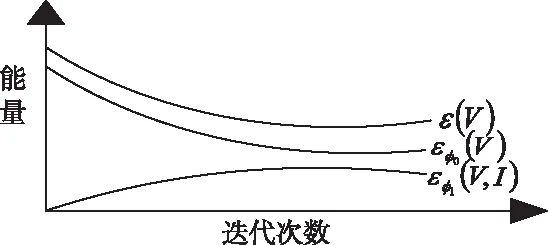
5)使用两个阈值T1和T2做双阈值处理,T1 6)边缘连接; 7)三分量合成后得到边缘检测图像中存在带有颜色的噪点,故将其灰度化后,去除颜色噪点,观察边缘。 彩色遥感图像细节丰富,采用较低阶数处理图像,噪声的非线性扩散更加明显,用高阶数处理,可能会出现部分细节边缘漏检的情况。文献[8]中提到,当分数阶微分的阶数v在0~1之间时,信号的低频成分被加强,v在1~2之间时信号的高频成分被提升。对于彩色遥感图像而言,高中低频信息都特别丰富,针对不同程度信号的区域选择合适的分数阶阶数,就尤为重要。且在获取彩色遥感图像时受到成像机器、日照等因素的影响,部分细节信息展示不完全、被噪声污染。文献[8]提到分数阶微分能够大幅度提升中高频成分,保留低频成分,获取图像细节和丰富边缘。但即使是无噪图像,平滑区域也存在着微弱起伏,经分数阶微分处理后,出现明显噪声。更何况彩色遥感图像,含有一定的噪声,经分数阶微分处理后,噪声也会被非线性放大和扩散,进而影响到图像周围像素,使得图像边缘检测的质量下降。另外Canny算子中阈值的选择也尤为重要,文献[9]提到阈值过高,边缘信息检测不全,阈值过低,则会出现伪边缘。适合的阈值选择可准确定位边缘,剔除伪边缘。为解决以上问题,引入高斯曲率滤波。 龚元浩博士在文献[10]中提到用高斯曲率滤波来保留图像细节和解决图像噪声问题。假设图像是分段可展的,高斯曲率在图像上处处为零。具有零高斯曲率的表面可以等距地映射到平面上而没有失真。因此,最小化高斯曲率等同于使信号“尽可能可展开”,这就使得高斯曲率是一种同时保护边缘和去除噪声的滤波器。 高斯曲率滤波的提出是考虑最小化内存去处理非常大的图像正适合于彩色遥感图像。在最小化期间受到数据拟合能量和正则化能量的行为的启发, ε(V)=εφ0(V,I)+λεφ1(V) (12) 其中V是拟合能量,I是规范化数据,ε(V)是总能量,εφ0(V,I)是数据拟合能量,εφ1(V)是正则化能量,λ是标量系数。且数据拟合能量总是增加,但正则化能量总是减少,如图2,能量关系图所示。 图2 能量关系图 降低正则化能量,是一种局部最小投影操作。用易于构造的三角形将相切平面TS表示为相邻像素,以一个黑色圆圈x及其3×3邻域为例,如图3右图所示。图中柱体的高度代表不同的像素值,切平面TS(△)以顶端绿色三角形绘制。将红球投影到绿色三角形的切线平面上和将其投影到经过x的绿色三角形边缘上是相同的。计算(红球)到这个绿色三角形边缘的距离di(图3左图)。 图3 切平面示意图及切平面到边缘距离计算示意图 为了找到具有最小|di|的切平面,图4是关于x的3×3像素邻域中不包括x作为顶点的通过四个白色邻居W一种切线三角形。 图4 切线三角形 切线三角形可能会共享同一边缘,并且在这些边缘上投影,只有8个不同的di。计算全部(di,i=1…) 使用最小绝对距离作为当前强度U(x)与目标强度(x)的最小投影,使得(x)在通过相邻像素的切面上。即最小投影dm,|dm|=min{|di|,i=1,…,8}。 d1=(U(i-1,j)+U(i+1,j))/2-U(i,j) d2=(U(i,j-1)+U(i,j+1))/2-U(i,j) d3=(U(i-1,j-1)+U(i+1,j+1))/2-U(i,j) d4=(U(i-1,j+1)+U(i+1,j-1))/2-U(i,j) d5=U(i-1,j)+U(i,j-1)-U(i-1,j-1)-U(i,j) d6=U(i-1,j)+U(i,j+1)-U(i-1,j+1)-U(i,j) d7=U(i,j-1)+U(i+1,j)-U(i+1,j+1)-U(i,j) d8=U(i,j+1)+U(i+1,j)-U(i+1,j+1)-U(i,j) |dm|=min{|di|,i=1,…,8} (13) 其中,U(i,j)表示(i,j)处的像素值,di,(i=1,…,8)是表示(i,j)点与不同领域点所在切平面的距离,(i,j)表示(i,j)处的输出像素值。在此过程中寻找最小|di|,即高斯滤波的曲率,从而完成对整个图像的滤波操作。 2.4.1 算法参数选择 2.4.2 算法实现步骤 定义高斯曲率滤波函数为φGC,整个改进的彩色遥感图像边缘检测算法的实现流程为: 1)规定分数阶微分模板为5*5,分数阶阶次为(0,2),双阈值T1=(m1,T),T2=(T,m2)高斯曲率滤波窗口为3*3; 2)输入原始图像,彩色遥感图像g1; 3)分数阶微分模板归一化处理,将模板中的每一项均除以(8-12*v+4*v*v),后将模板应用到Canny算子中,得到基于分数阶微分和Canny算子的彩色遥感图像边缘检测算法,处理g1完成图像的边缘检测处理,获得边缘图像g2; 4)对g2进行高斯曲率滤波处理即φGC(g1),在此过程中寻找最小正则化能量εφ1(V),即最小距离|di|,同时获得最优参数; 5)重复操作步骤3)4),直至高斯曲率滤波的窗函数遍历整个图像,得到最佳的边缘图像。 实验在Windows7操作系统,MATLAB 2014a平台上,选取三幅彩色遥感图像,Aircraft1和Aircraft3是来自武汉大学标注的RSOD-Dataset,Aircraft2是截取自“吉林一号”卫星的机场图,在原图和加入0.05的椒盐噪声的情况下,实验研究优化算法的可行性,通过Sobel、 Roberts、Prewitt、LOG四种算子以及本文的优化算法作对比,实验结果见图5。观察分析在原图情况下五种方法检测结果:虽然都能检测出彩色遥感图像的边缘,但Roberts算子出现漏检的情况最为严重,Sobel和Prewitt两种方法次之、出现了一些细节边缘信息未成功检测到的情况,LOG算子出现了过检的情况、产生了伪噪声,并且以上四种算子都出现了边缘不连续的情况。本文的优化边缘检测算法得到的边缘是最完整的,能更准确地定位边缘的位置并提取到边缘;观察分析在加入0.05的椒盐噪声情况下,Roberts、Prewitt算子基本上检测不出边缘,实验结果无意义;LOG算子在加噪的Aircraft2和Aircraft3图中能检测到部分边缘,但抗噪性能不足;Sobel算子虽有一定的抗噪性,但出现了边缘漏检的情况;而本文算法,在加入噪声情况下,抗噪性能优越,能够定位检测到图像边缘,且边缘完整。引入定量的评价指标,用图像熵法和峰值信噪比来表达五种算子在彩色图像边缘检测中的效果。 1)图像熵 图像的熵是一种能够表示图像平均信息量的统计形式[13]。灰度分布的空间特征值用图像的领域灰度均值来表示,并将空间特征值与图像的像素灰度组成一个特征二进制组,记为(i,j),其中i表示像素的灰度值(0 <=i<=255),j表示邻域灰度均值(0 <=j<=255),该二进制组的综合特征如式(14),其中f(i,j)为特征二进制组(i,j)出现的频率,N表示图像的大小,那么离散的图像二维熵为式(15)所示,分析表1中的实验数据发现:本文提出的关于彩色遥感图像边缘检测的优化算法在原图情况下的图像熵比Roberts、Prewitt、LOG与Sobel四种方法的图像熵均高,说明本文算法在保留图像细节方面具有优势;在加入噪声情况下,Roberts、Prewitt两种算子性能最差,LOG算子和Sobel算子的图像熵与原图加噪熵值相比,变化幅度最小,说明这两种算子对噪声不敏感,难以滤除噪声,本文算法的在原图和加噪情况下图像熵值变化不大,说明本文算法的抗噪性能优于其它四种算法。 Pij=f(i,j)/N2 (14) (15) 图5 彩色遥感图像五种边缘检测算法对比 表1 五种方法边缘检测结果的图像熵(单位:比特/像素) 2)峰值信噪比 峰值信噪比(PSNR)是一个用来表示图像失真度或是噪声水平的定量指标。式(15)定义了峰值信噪比,式(16)为图像的均方误差(Mean square error,MSE),其中,I(i,j) 是不加噪声提取的图像边缘信息,K(i,j)是加噪声后提取的图像边缘信息,(m,n) 为图像的大小。PSNR的值越大算法的抗噪性越好[13]。表2中的数据是通过五种方法作边缘检测后得到边缘图像的峰值信噪比,用来表征算法的滤除噪声的能力;实验数据表明:本文优化算法无论是在原图还是加入0.05椒盐噪声的情况下均得到了较高的PSNR,在抗噪声性能方面具有一定的优势。 (15) (16) 表2 五种方法边缘检测结果的PSNR(单位:dB) 本文针对彩色遥感图像边缘检测过程中定位不准确、信息不完整以及噪声影响等问题,提出一种改进算法:①设计一种分数阶微分模板,求取图像梯度,改进Canny算子;②引入高斯曲率滤波理论,解决分数阶微分在提升图像的中高频成分、保留低频成分的同时,明显放大了图像噪声的问题;③在高斯曲率滤波寻找最小正则化能量的同时,获得最佳的分数阶微分阶次和Canny算子双阈值。改进算法与常见的Roberts、Prewitt、LOG与Sobel四种算子相比,能够准确定位边缘,获得更多的边缘细节信息,抗噪性能具有明显优势,更加适用于彩色遥感图像的边缘检测。2.3 高斯曲率滤波理论


2.4 改进的彩色遥感图像边缘检测算法参数选择及实现过程

3 实验结果与分析






4 结语
