基于灰度梯度正则化的数字图像位移标定仿真
2021-11-17邓秋菊
邓秋菊,徐 琴,王 宁
(重庆邮电大学移通学院,重庆 401520)
1 引言
标定技术存在一定限制性,且容易受到周围环境影响,导致标定结果通常存有误差,影响数字图像内容识别的准确性。数字图像位移是图像内容识别的重要检测内容,位移标定以固定基准点为参照,采用相应的传感器,标定数字图像移动点相对于固定基准点的位移变化[1]。
文献[2]提出基于遗传算法的数字图像位移标定方法。该方法通过与之相关系数可实现对图像匹配程度进行衡量,将归一化函数视为相关参数和该方法的最终目的函数,对目的函数进行求解,可得到图像的位移,并对其进行标定。但该方法的标定精度较低,应用效果较差;文献[3]提出基于Tsai算法的图像位移标定方法。运用了摄像机镜头畸变模型,对成像设备的检测系统进行成像误差进行计算,同时设计出了点阵式标定模板,对图像位移进行标定。但该方法过于简单,标定范围有限,不适用于所有图像位移的标定;文献[4]提出基于单个读数头检测方法的图像位移标定。采用傅里叶逼近模型对读数头存在的误差进行拆分,得到多次谐波的叠加,并利用检测值差商对误差进行估算,将差商阶数增大,以降低逼近模型的误差,并采用最小二乘法对标定参数进行优化,最后采用优化后的标定模型对图像位移进行标定。但该方法的稳定性较差,且耗费成本较高。
上述方法在标定图像位移时,需要采用极高精准度的检测设备,导致成本较高,且在检测和标定的过程中,易受环境等影响,使最终结果带来噪声干扰的结果。为此,提出基于灰度梯度正则化的数字图像位移标定方法。经过仿真验证,本文方法具有较高的标定精度,且检测所用仪器设备简洁,成本较低。
2 数字图像位移标定方法
2.1 去噪处理
由于拍摄成像时,会受到周围环境的影响和相机镜头的误差,导致图像成像存在误差。为了消除误差,需要采取图像去噪的方法处理图像,同时还要标定相机。
为了避免检测结果存在噪声干扰现象,提出基于灰度梯度正则化的图像去噪方法[5]。该方法在以函数存在误差为δ的情况下,创建泛函令目标函数的误差降到最小,提高灰度梯度正则化的抗噪能力。


(1)
根据灰度梯度正则化方法求得的正则解f*是一个三系样条函数,包括误差水平参数δ,该函数的具体表达形式为
f*=aj+bj(x-xj)+cj(x-xj)2+dj(x-xj)3
x∈[xj,xj+1],j=0,1,…,n-1
(2)
式中:aj、bj、cj、dj分别表示需要求解的函数系数。
该函数的系数可以满足以下约束条件

(3)


(4)
则误差水平参数δ的具体表达式为

(5)
通过获取误差水平参数,实现了对正则化参数的求解,从而完成图像的去噪处理。
2.2 图像测点位移计算
为了减少标定存在的误差,以及消除相机镜头的畸变问题,在传统数字图像相关技术上,引入位移标定方法,完成摄像机的标定,进而实现对图像测点位移的标定[6]。
在图1中,假设空间某点P在世界坐标系O-XwYwZw中的坐标表示为(Xw,Yw,Zw)T,在摄像机坐标系o-xyz中的坐标表示为(x,y,z)T。(X,Y,1)T和(u,v,1)T之间的关系为

(6)
式中:dX表示像素在X轴上的距离,dY表示像素在Y轴上的距离,这两个参数为固定存在的参数,(u0,v0)T表示主点坐标。
摄像机坐标系坐标(x,y,z)T和坐标(X,Y,1)T之间的关系可用下式进行表示
(7)
式中:f表示为摄像机焦距,s表示比例系数。
(Xw,Yw,Zw)T和(x,y,z)T之间的关系为

(8)
式中:R表示坐标旋转矩阵,T表示由摄像机坐标系变换到世界坐标系的水平方向位移向量。可通过具体标定方法对这两个参数进行计算。
将式(6)代入到式(7)并整理,可得到

(9)
将式(8)和式(9)进行联立,可通过坐标(u,v,1)T对(Xw,Yw,Zw)T点在世界坐标系中的坐标f*进行计算。
计算比例系数s[7]。该值与世界坐标系的选择有关,将世界坐标系创建在被检测的相机上,世界坐标系的XWYW平面和图像测点发生位移的平面重合,ZW轴可满足右手坐标系。在坐标系中随机选择三点确定的平面,该平面的表达方程为
Ax+By+Cz+D=0
(10)
将式(9)转换成方程组的形式,可得出

(11)
将式(11)代入到式(10)中,并进行整理,可得到比例系数s的计算公式为

(12)
通过在图像上的坐标(u,v,1)T就可计算出世界坐标系中的坐标(Xw,Yw,Zw)T。
2.3 相机标定计算
为了避免图像位移发生较大的变化,因此需要进行图像位移标定,最好的方法就是对相机进行标定,只有相机配置和稳定性保证了,才能保证图像位移的稳定性[8-9]。
对相机标定时以图像位移标定的基础,作为数字图像信息获取的核心步骤,在标定的过程中,由于相机镜头生产和加工的过程中会出现误差的现象,如图1所示。

图1 相机误差示意图
为消除相机镜头存在的畸变现象,提出针对平面靶标的标定方法。该方法是一个非线性模型相机的线性标定方法,只需要考虑到二阶镜像畸变,畸变模型的具体表达式可用下式进行表示

(13)

1)对单应性矩阵进行求解


(14)
式中:A表示相机中各项参数,具有含有

(15)
式中:α表示u轴的尺度因子,β表示v轴的尺度因子;γ表示u轴和v轴的水平因子。
将式(14)进行进一步变换,得出下式形式

(16)
式中:ri表示旋转矩阵R的第i列。
通过上述变换,届时标定板平面上的点M和相应的像素点m之间含有一个变换矩阵,也就是单应性矩阵H,具体为

(17)
其中

(18)

(19)
2)相机内部各项参数进行求解
对单应性矩阵H进行求解后,可得出
(20)
令

(21)
则

(22)
其中

(23)
将式(20)进行改编,得出
(24)
对标定板拍摄了n个图像,将其转换为方程,并组叠起来,得出Vb=0。当对b求解后,可求出矩阵A,上述计算结果均为初始值,进行优化搜索,进而可对相机内部各项参数的准确值进行计算。通常采集10幅以内图像就可以获取到较好的标定结果。
3 仿真证明
实验设备为某公司生产的相机,采用频率可达到55Hz,传感器采用KODAK CCD,相加分辨率为1000(H)*1000(V),像素为8.2μm*8.2μm。光学镜头为15~39mm的变焦镜头。

图2 实验图像标定设备
实验在配置为:CPU Intel 酷睿i5 4590 3.5Hz,主板 华硕B85M-F,内存 金士顿骇客神条FURY 8GB DDR3 1866,硬盘希捷Barracuda 1TB 7200转 64MB 单碟(ST1000DM003),操作系统 Windows 7旗舰版的计算机上创建仿真平台。以该平台为背景,对以下两幅样本图像进行处理。

图3 实验样本图像
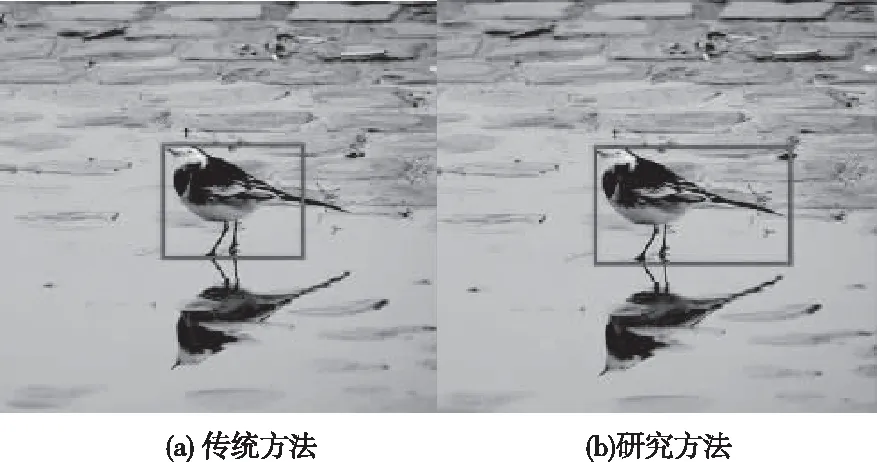
图4 样本一图像位移标定结果

图5 样本二图像位移标定结果
根据以上图像标定结果可知,对于两幅样本图像,其主要标记点数量是不同的,密集程度也是不同的,利用不同方法对其标定时,会更好的验证方法的有效性。针对于文献[3]方法,其标定结果虽然并无错误,但是标记特征信息明显是不完整的,当出现多个特征需要被标定时,该方法无法实现同时完成标定动作,这说明传统方法无法满足目前的图像标定技术要求。而研究方法在标定结果上看是更具优势的,不仅可以完成标定图像,并且其标记对象规划更为清晰,大大提升该方法的应用性能。

图6 标定精度对比
在图像标定结果的基础上,利用仿真平台输出不同方法的标定精度,并将数据整理成图5折线图。从图中各个方法的标定精度变化走势来看,随着实验次数的增多,标定精度会降低,这是因为实验次数越多,方法所处理的图像数量就越多,所以精度出现下降是不可避免的,但是在此情况下,研究方法的精度始终较高,这说明研究方法是符合实际应用要求的。
为了进一步验证本文方法的有效性,将均值误差和标准差作为本次实验的评价指标,将本文方法的实验结果与其它两种方法进行对比,具体实验结果如图7所示:

通过分析图7(a)得出:图7(a)是三种方法的均值误差对比结果,根据图(a)可知,三种方法中基于遗传算法的数字图像标定方法和Tsai标定方法的均值误差变化趋势较大,其中基于遗传算法的数字图像标定方法的均值误差最大值几乎接近0.015,最小值也超过-0.010,误差是三种方法中最大的,而Tsai标定方法的均值误差相对遗传算法要好一些;本文方法的均值误差变化不是很大,上下波动的范围都在-0.005~0.005之间,说明本文方法的均值误差较小,标定结果较准确。
通过分析图7(b)得出:图7(b)是三种方法的表差对比结果,由图可直接看出,Tsai标定方法的标准差最大值几乎接近0.045,基于遗传算法的数字图像标定方法的标准差最大值也已经超过0.030,而本文方法的标准差是三种方法中最小的,最大值没有超过0.015,再次验证本文方法的准确性。
4 结束语
传统方法标定的数字图像位移,由于没有考虑到成像过程中,存在环境等因素的干扰和成像设备的镜头问题,导致标定结果存在较大误差。为此提出基于灰度梯度正则化的数字图像位移标定方法。该方法通过对两种影响因素进行优化,弥补了传统方法的不足之处。采用灰度梯度正则化方法将图像存在的噪声等干扰进行消除,同时对相机的镜头畸变进行计算并标定,进而实现对图像测点位移的标定。经过仿真证明,本文方法具有较高的标定准确度,且可快速地实现对目标的标定。
