基于限幅函数的永磁同步电机模糊PID调速控制系统
2021-11-05张堂玉龙祖强许岳兵马凌峰
张堂玉,龙祖强,许岳兵,马凌峰
(衡阳师范学院 物理与电子工程学院,湖南 衡阳 421002)
在“工业4.0”的智能化时代,永磁同步电机正朝着智能化、数字化的方向发展。从市场数据来看,中国伺服市场的规模依旧处于上升的趋势,但在性能方面距离国际领先水平还有一定的距离,高端的伺服技术几乎被外来企业垄断。“高精度、高速度、高频响、智能化”是伺服技术永恒的主题。为了顺应伺服技术的主题,国内外的研究者们相继提出了不同的算法来提高伺服电机的控制精度。李添幸等提出了一种永磁同步电机模糊控制系统,解决了传统PID控制系统在驱动电机过程中出现的转矩脉动大的问题,但转速响应仍然较慢[1]。孙静等设计了一种永磁同步电机模糊PID控制系统,提高了系统的响应速度,但系统抵抗外界的干扰能力较低[2]。丁文双等搭建了一种永磁同步电机模糊PID自适应调整参数的控制系统,提高了系统的灵活性,但转速环的控制精度较低[3]。梁艳等提出了一种永磁同步电机的新型矢量控制算法,实现了电机的驱动,但转速曲线存在扰动[4]。为了提高永磁同步电机调速控制系统的响应速度和减少电流波形的总谐波失真程度,本文采用限幅函数和模糊PID以及比例因子串联控制器的速度外环控制方法,并采用模糊PI控制器的电流内环控制方法,以实现对转速的精准控制。将从系统的稳定性、限幅函数的功能、仿真实验效果等三个方面分别阐述该方法的有效性。
1 闭环控制系统的稳定性分析
闭环控制系统包括速度外环和电流内环。首先对电流内环进行分析:电流内环由PI模块(模糊PI的等效代替)、中央处理器模块、逆变器模块和电机模块组成。电流内环结构如图1所示。

图1 电流内环结构
其中中央处理器模块为延迟环节,td=Ts。逆变器模块为惯性环节,kpwm为逆变器的增益,这里取kpwm=1。中央处理器模块和逆变器模块可以合成简化为:

忽略动态项和耦合项后得到定子电压方程为:

对式(2)进行拉普拉斯变换得到电机的传递函数为


在研究速度外环时,电流内环可以近似为一阶环节[5]。模糊PID简化为PID环节,电流内环和中央处理器模块合成简化为

其中Ts2=4Ts,速度外环结构如图2所示。

图2 速度外环结构

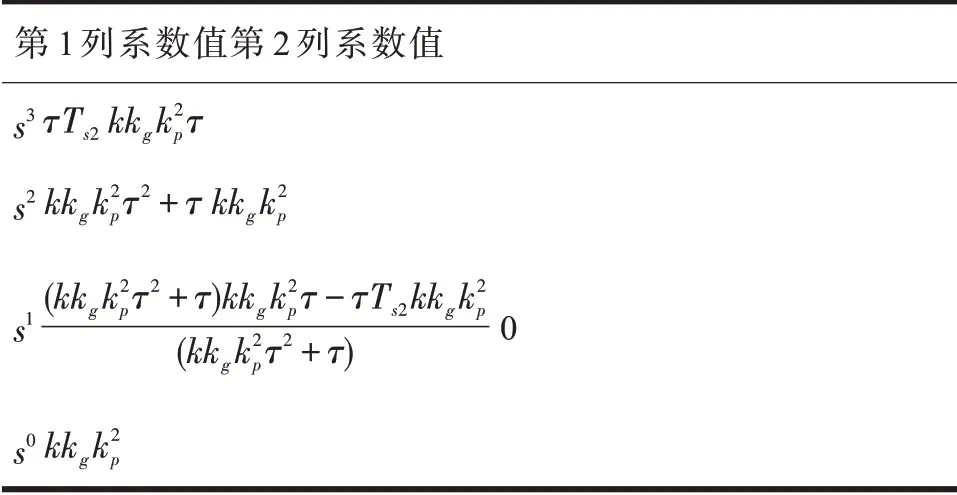
表1 劳斯表
2 限幅函数的功能分析
2.1 限幅函数的FFT分析
三相电流是指在永磁同步电机定子的三相对称绕组上通入的正弦交流电。理想的三相交流电会使电机内部产生理想的旋转磁场,从而使电机转动。由于逆变器具有非线性的特质,使得永磁同步电机三相电流波形发生严重失真,从而降低了电机的转动效率[8-9]。为了减小电流波形的总谐波失真程度(THD),引入限幅函数对输入的速度误差进行限幅[10-11]。根据反正切函数的单调递增性和有界性,最终选择k=arctan(0.07 u)函数作为本文的限幅函数。
为了验证限幅函数的作用,在其他条件相同的前提下,采用FFT对加入限幅函数前后的电流谐波分量进行分析。FFT是一种离散傅立叶变换的快速算法,将时域信号转换到频域信号进行频谱分析[12]。限幅前后电流谐波FFT分析如表2所示。
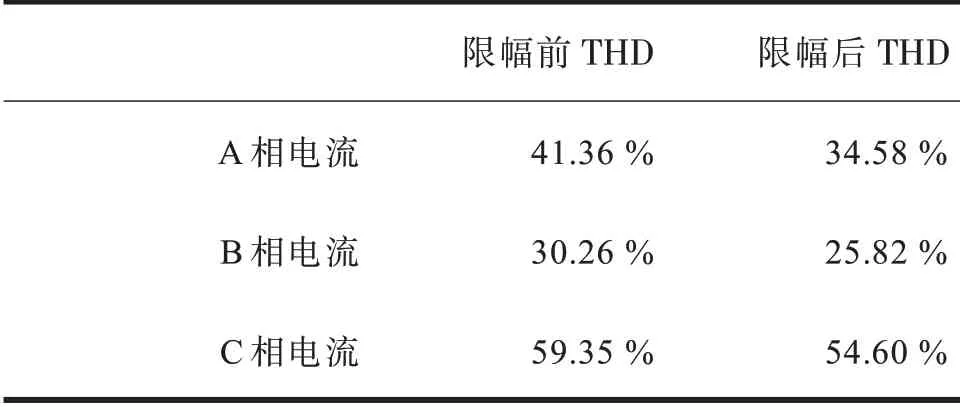
表2 限幅前后电流波形的THD对比
由表2可知:在其他条件相同的前提下,限幅函数有效地减小了三相电流波形的总谐波失真程度,从而减少了电机的损耗。
2.2 限幅函数波形分析
在Simulink中用示波器观察限幅前后信号的波形变化,如图3和图4所示。
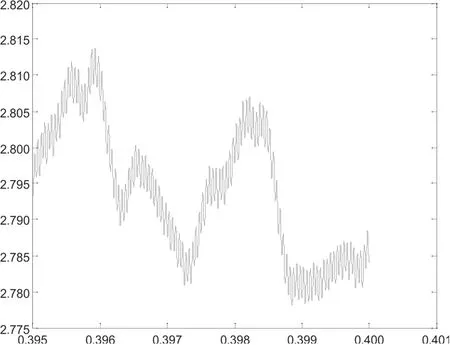
图3 限幅前信号振荡波形

图4 限幅后信号振荡波形
由图3和图4可知,在限幅函数的作用下,信号振荡的峰值缩小了14倍。限幅函数很好地抑制了系统的振荡,提高了系统的稳定性。电机在转动时会产生大量的纹波电压,而纹波电压又会影响电机的性能,带来噪声。限幅函数可以降低纹波电压的幅值,从而减少噪声[13-15]。
3 模糊PID控制器的设计
电机转速控制系统主要由速度外环和电流内环组成。电流内环和速度外环都采用了模糊算法,有效地提高了系统的鲁棒性。为了降低波形的失真程度和提高系统的响应速度,选择在速度外环采用限幅函数和模糊PID及比例因子串联控制器,电流内环采用模糊PI控制器。
模糊PID控制是利用模糊规则对PID三个参数进行实时整定,避免了传统PID控制需要人工反复调整参数的问题。量化因子将误差和误差变化率的基本论域映射到模糊论域进行模糊化、模糊推理和去模糊处理后,将kp,ki和kd输出至PID控制器。
3.1 模糊化
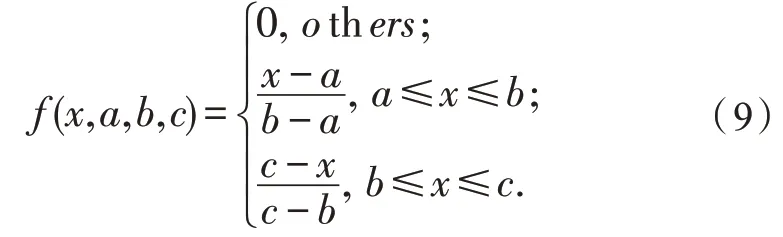
给定目标转速为1 000 r/min,模糊控制器各变量的模糊子集分别都为{NB,NM,NS,ZO,PS,PM,PB},且e和ec,Δkd的模糊论域都为[-3,3],Δkp的模糊论域为[-0.03,0.03],Δki的模糊论域为[-0.06,0.06]。模糊子集NB和PB的隶属度函数选用S型,其他模糊子集隶属度函数选用三角形。其中Δkp,Δki,Δkd分别为kp,ki和kd的修正值。S型隶属度函数为

三角形隶属度函数为:
3.2 模糊推理及模糊规则
在模糊工具箱中添加模糊规则,推理方法选用mamdani合成推理法。推理规则:当|e|取较大时,增大kp并减小kd,ki取0;当|e|,|ec|处于中等值时,减小kp且ki和kd应取适中;当|e|较小时,增大ki和kd;当|ec|较小时,增大kd;当|ec|较大时,减小kd。
3.3 去模糊化
去模糊化是指将输出的模糊论域通过比例因子映射到基本论域中,本文选用重心法进行去模糊化。
4 实验仿真
4.1 限幅函数的仿真实验验证
结合第3节限幅函数功能分析,在其他条件相同的前提下,对加入限幅函数前后的实验效果进行仿真对比。仿真结果如图5和图6所示。
由图5和图6可知,限幅前的电流波形具有较大的谐波成分,在限幅函数的作用下,电流谐波成分显著减少。表明限幅函数能够显著减少电流波形的总谐波失真程度,提高系统的稳定性,减少系统的噪声。

图5 限幅前三相电流波形
图6 限幅后三相电流波形
4.2 本文方法和模糊PID方法的仿真对比
本文电机调速控制系统是指在速度外环采用限幅函数和模糊PID及比例因子串联控制器,电流内环采用模糊PI控制器。传统电机调速控制系统是指在速度外环和电流内环都采用模糊PID控制器。本文设计的调速控制系统与传统调速控制系统的仿真对比如图7所示。
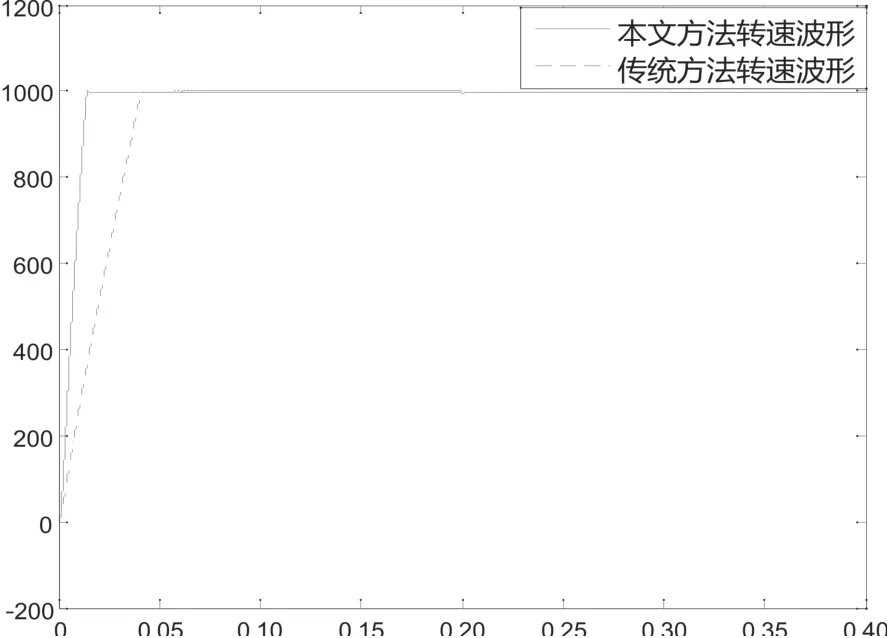
图7 电机调速控制系统仿真对比
由图7可知,本文方法的转速调节时间明显少于传统模糊PID方法的转速调节时间,且两种算法均不存在超调。在0.2秒突加负载时两种方法的转速波形基本不受影响。
5 结论
根据劳斯稳定判据的充要条件分析了系统的稳定性。通过FFT和信号波形分析,限幅函数有效地减少了三相电流波形的总谐波失真程度,并提高了系统的稳定性,减少了噪声的产生。速度外环和电流内环都采用了模糊控制算法以提高系统的鲁棒性和抑制系统的超调。在速度外环的模糊PID控制器后串联一个比例因子既避免了系统的振荡又提高了系统的响应速度。仿真实验表明,本文方法显著提高了系统的响应速度和降低了电流波形的失真程度。
