电流误差信号补偿技术在弱电并网稳定控制中的应用
2021-11-03福建船政交通职业学院刘俊萍
福建船政交通职业学院 刘俊萍
为解决传统基于零序环流控制器的控制方法在对弱电并网控制时,存在并网不稳定问题,开展电流误差信号补偿技术在弱电并网稳定控制中的应用研究。通过计算弱电并网稳定运行电气连接功率误差、基于电流误差信号补偿技术设计逆变器补偿系数、实现并网抗阻相位角稳定控制,提出一种全新的控制方法。通过实验证明,新的控制方法在实际应用中能够有效降低暂态电压,提高电网的运行质量以及运行效率。
清洁能源在电力产业内的广泛应用,在一定程度上为电力产业建设提供了新的指示方向。在调度电网资源的实际调度与运行中,受到电网特性的影响,传输电流质量与临近端电力系统的稳定性会受到负面干预,电网负载电压中衍生了大量低次谐波,导致正常运行的电网表现出弱电网的特征,而弱电并网中电流误差问题,也会影响终端传输电流质量。在弱电并网持续运行的过程中,输出的信号滤波稳定性将直接影响到终端电流质量。为了更好地实现与此方面相关的工作,引进电流误差信号补偿技术,实现电气交互过程中对弱电并网稳定运行的有效调控。
1 弱电并网稳定控制方法
1.1 计算弱电并网稳定运行电气连接功率误差
为了实现对弱电并网运行的稳定控制,应当先明确并网在稳定运行状态下,受到电气连接功率的影响产生的弱电运行效应。在进行与此方面相关研究前,进行弱电并网电气连接功率交互行为的描述。如图1所示。

图1 弱电并网电气连接功率交互行为
图1中:Q1、Q2、Q3、Q4分别表示为弱电并网在运行中开关的功率;Vin表示为前端输入的直流电压;L1、L2分别表示为弱电并网中逆变设备的滤波电感与电网侧的电感;ig表示为弱电并网电流;PCC表示为电压节点;Zgrd表示为电网的阻抗值;u0表示为在PCC点的实际电压值;ug表示为公共电网电压值;uinv表示为桥臂端输出的直流电压;R表示为串联的阻尼电阻;Cf表示为电容;PLL表示为逆变器;iref表示为电流相位角度。
在完成对弱电并网电气交互的描述后,应当明确逆变器在其中的锁向电流相位电压追踪,可能受到电网畸变的影响,因此在本章的研究中,采用同步旋转坐标轴代替锁向电流相位电压的描述,以此种方式对电流时域进行描述。此过程可结合SRP-PLL方程,对电网小波电流信号扰动或进行表示。在此基础上,通过拉式转换的方式,得到一个针对电网小波电流信号扰动的数学模型,此模型可用如下计算公式表示。

公式(1)中:TPLL(S)表示为在一个周期T内,电网小波电流信号s的扰动数学表达;k表示为拉式转换系数;φ表示为功率因数角,计算单位表示为rad;j表示为小波信号频率;Um表示为弱电并网在PCC点时,电流产生的峰值;S表示为采样数据;ω0表示为基波角频率,计算单位表示为rad/s。
根据弱电并网的数字控制时长,引进数字控制技术,结合数字化技术的特点,获取采样模型,定义TS为一个数据采样周期,此时,可将数据处理的等效信息表示为一个零阶保持阶段信号,而此信号在控制器执行程序与计算时,常出现滞后一拍的问题,此时弱电并网在运行中,电气连接功率将出现时延。此处时延可用如下计算公式表示。
公式(2)中:Gv(s)表示为弱电并网在运行中电气连接功率的时延,为了简化上述计算过程,可在此步骤中,定义数据采样信息为延迟函数的方式,将获取的功率误差进行线性表达,按照线性表达方式,输出对应功率处的误差值,以此种方式,完成对弱电并网稳定运行电气连接功率误差的计算。
1.2 基于电流误差信号补偿技术设计逆变器补偿系数
按照上述操作完成对弱电并网稳定运行电气连接功率误差的计算后,将其作为数据基础,结合电流误差信号补偿技术,实现对逆变器补偿系数的设计。在确定逆变器补偿系数时,需要获取逆变器在运行过程中的直流电压、输出功率、开关频率、交流相电压等参数。结合基尔霍夫电压和电流定律,通过选取弱点并网控制过程中的状态变量,将其作为流过滤波电感的电流,分析得出电网电压。结合SCR定义,对电网阻抗的最大值进行计算,其计算公式如下:

公式(3)中,Lmax表示为电网阻抗最大值;SCR表示为短路比系数;f表示为弱点并网频率;V表示为弱点并网电压。根据上述公式(3),计算得出电网阻抗的最大值,明确在弱点并网的过程中电网阻抗的变化范围,并针对具体某一弱点并网的特征,在电网最弱的情况下,根据上述公式,计算得出其电网阻抗。由于弱点并网当中,逆变器的运行稳定主要取决于一对复极点,随着及分析次数的不断增加,当达到一定程度后,又会逐渐向着水平方向移动。随着电网阻抗的不断增加,一对复极点会逐渐呈现出更加明显的上升趋势。由于在对弱点并网稳定控制时,需要确保所有闭环极点均在同一平面上,并且距离水平方向越远其稳定性越好,因此根据这一特点,应当将各个复极点放置在特定的平面上,以此确定逆变器补偿系数。
1.3 实现并网抗阻相位角稳定控制
在明确逆变器补偿系数后,通过实现并网抗阻相位角稳定控制,达到稳定弱点并网的目的。根据上述论述可知,当阻抗比的相角裕度出现不足的情况是,弱点并网当中的逆变器会出现部分特定谐波被放大的问题产生,进而影响到弱点并网的质量和稳定性,还会造成谐波振荡问题产生,造成更加严重的后果。因此,在对其进行控制时,首先需要明确稳定状态下的并网抗阻相位角,并计算得出阻抗比在交接频率位置上的相角裕度,其计算公式为:

公式(4)中,α表示为交接频率位置上的相角裕度;Zg(f)表示为电网阻抗;argZi(f)表示为并网逆变器输出阻抗;f表示为交接频率。根据上述公式可知,通过减小电网阻抗Zg(f)或增大电网逆变器输出阻抗的方式都能够达到提升相角裕度的目的,因此在实际弱点并网控制过程中,根据相角裕度变化情况,通过调节电网阻抗和电网逆变器输出阻抗的方式,可以实现对并网抗阻相位角的稳定控制。
2 实验论证分析
为进一步验证本文方法在实际应用中的效果,选择以某单相并网逆变器作为实验对象,分别利用本文提出的控制方法和传统基于零序环流控制器的控制方法对该单相并网逆变器进行弱电并网稳定控制。该单相并网逆变器的直流电压为320V,电网电压为220V,并网电流为6A,载波幅值为12V,电网在运行过程中的频率为45Hz,逆变器侧电感为3.2mH。为了确保最终得出的实验结果具有公平和公正性,本文选择在两个控制方法当中都应用TM875-504550型号数字控制器作为其主要控制设备。
基于上述实验准备,本文选择将暂态电压作为实验评价指标,利用该指标反映两种控制方法的实际应用效果。为了方便对两种方法得出的控制结果进行对比,将实验过程中产生的相关数据记录,并利用Excel软件将数据绘制成如表1所示。
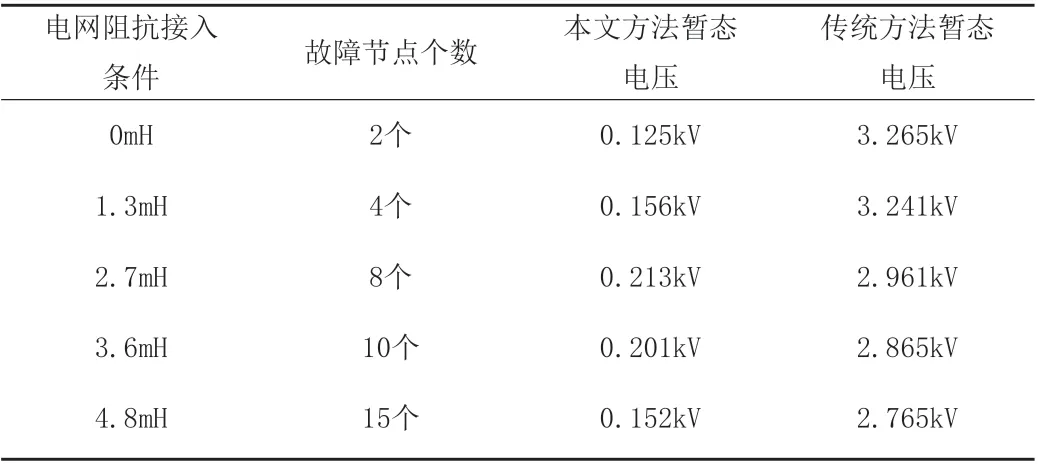
表1 两种控制方法实验结果对比表
从表1得出的实验结果可以看出,本文设计的控制方法能够实现对弱电并网的稳定控制。
结束语:本文引进电流误差信号补偿技术,对弱电并网稳定控制方法展开设计与研究,并在完成对方法的设计后,通过对比实验证明了此方法在实际应用中,具有更好的控制效果,可在后期的相关研究中,尝试将此方法投入市场应用,致力于通过此种方法,提高弱电并网运行的稳定性。
