LOS引导算法的UUV航行控制
2021-11-03中国船舶重工集团公司第七一五研究所
中国船舶重工集团公司第七一五研究所 陈 俊
UUV在水下航行时,需要对其深度和航向进行控制。相对于定航向控制,定深控制更为复杂,通常需要对其俯仰角进行控制以达到控制深度的目的。针对定航向控制和定深航行中俯仰角难以控制的问题,使用LOS引导算法,为俯仰角的控制提供参考角度,使用改进的PID控制算法对其航向、深度进行控制,并结合模型,在Matlab中对设计的引导算法和控制控制算法进行仿真验真,结果表明,引入了LOS引导算法的PID控制器具有良好的控制性能。
无人水下自主航行器(UUV)是一种能够在水下自主航行的航行体,综合了耐高压材料技术、高速动(静)密封技术、自主控制技术、水下目标定位技术、声纳及图像识别技术等技术,能够根据搭载的任务系统的不同执行不同的任务。在军用方面,UUV已成为反潜战、水雷与反水雷战、水下载荷投送、侦查与识别的重要载体,多国海军已有成型的装备列装部队。而民用方面,UUV也被应用在海洋资源勘探、水下救援、海洋石油开发、水下通信等领域,促进了海洋经济的发展。鉴于其在军事及民用方面广阔的应用场景,UUV近年来一直是各国科研技术人员研究的重点。
UUV在自主航行过程中,通常需要根据任务设定保持一定的速度,在某一深度沿着某个指定方向航行,这对UUV的自主航行能力提出了很高的要求。UUV控制系统设计的主要难点在于:系统模型高度非线性、波浪和海流的随机性、强耦合性、强时滞性、运动学和动力学参数不确定性等,因此航行控制问题较为复杂。常规的PID控制器对航向控制能起到较好的效果,但深度控制往往因为俯仰角难以有效控制而导致振荡,产生较大的误差,且俯仰角不加以控制容易产生安全问题,一旦发生事故,可能造成巨大的财产损失。要获得良好的控制效果,需对UUV的俯仰角进行控制,同时结合模型特点,采用一定的控制策略和安全管理策略,提升控制器的稳定性和安全性。
1 LOS引导算法设计
对于UUV的定深控制,需要控制UUV以一定的俯仰角度向设定的深度下潜或上浮,并且根据不同的深度偏差值及时调整俯仰角度,因此俯仰角的控制对于深度控制极其重要。过小的俯仰角无法快速地达到期望深度,过大的俯仰角虽然可以快速达到期望深度,但容易产生超调和振荡,无法满足精确定深的要求,甚至可导致安全问题。因此在定深控制的过程中,要根据深度误差,实时调整期望的俯仰角度,控制UUV以合适的俯仰角运动,达到更好的动态特性。
为确保UUV安全准确地实现定深控制,设计俯仰角引导算法,在UUV航行过程中,实时提供参考俯仰角,并控制深度舵输出,使得UUV跟踪参考俯仰角,以平滑稳定的方式达到期望深度。
LOS(Line of sight)引导算法广泛应用于军事领域,是导弹制导中重要的引导算法。LOS引导算法一般包括三个点,即目标点、参考点和追踪点,LOS引导算法是非常典型的三点式引导算法。在船舶运动控制中,LOS通常应用在路径跟踪和轨迹跟踪中,用以为船舶航行提供参考的艏向角。其基本思想是根据船舶当前位置与期望值的横向误差值,得到一前向距离,由横向误差和前向距离计算期望的航向角,使得船舶沿着期望航向角航行,在航行过程中,实时更新期望航向角,最终使船舶驶向期望路径并沿期望路径航行。根据LOS的基本思想,将该引导算法应用到UUV的航行控制中,为俯仰角提供参考值。


图1 LOS引导算法应用在UUV航行控制中
运用LOS算法,将深度控制转化为俯仰角控制,因此UUV的水下深度和航向控制转化为对航向角和俯仰角的控制。
2 控制算法及策略设计
2.1 控制算法
本控制算法基于一类UUV模型,在传统PID控制算法的基础上进行改进。
被控UUV的推进系统为主推带舵的形式,其深度舵和航向舵垂直相交,舵的控制形式为电磁铁的吸合带动舵片运动,由于电磁铁只有吸合和断开两种状态,因此航向舵只有左/中/右三种状态,深度舵只有上/中/下三种状态。假定深度控制和航向控制解耦互不影响,针对航向和深度控制分别设计PID控制器。
航向控制为PID控制,计算给定航向和实际航向的偏差作为控制输入,再由PID控制器对误差量进行比例、积分、微分计算求和得到系统的输出。深度控制为基于LOS引导算法的双环控制,内环控制对象为俯仰角,外环控制对象为深度,内环的俯仰角由LOS引导算法给出参考角度,通过PID控制算法控制俯仰角来达到控制深度的目的。控制器结构如图2、图3所示。

图2 深度控制器
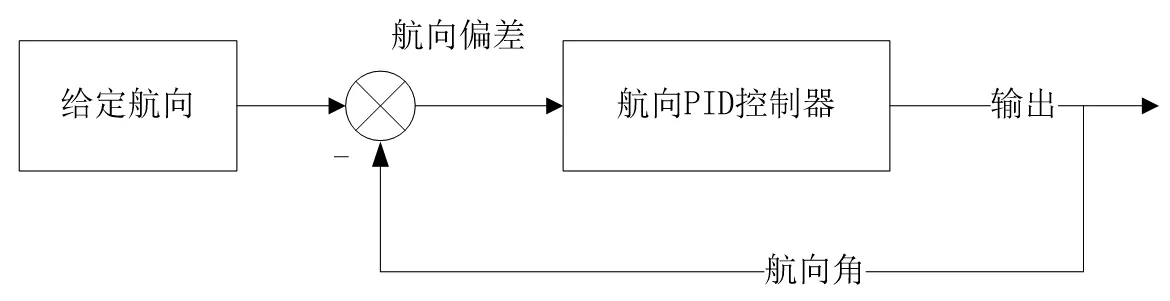
图3 航向控制器
2.2 控制策略
考虑到UUV的模型特殊性和安全问题,在控制器设计时运用一定的控制策略,实现控制效果和安全性的提升。

但是对于UUV来说,当俯仰角和横滚角超过一定的角度时,容易产生安全问题,因此控制器设计时引入对允许的最大俯仰角psi_max和roll_max横滚角,当检测到俯仰角大于psi_max时,深度舵停止输出,当横滚角度大于roll_max时,航向舵停止输出,防止因俯仰角和横滚角过大造成的UUV倾覆等严重问题。
3 仿真分析
为验证所设计的LOS引导算法和PID控制算法的有效性,根据已经建立的UUV运动模型,在Matlab中进行航行控制仿真,该仿真过程为:UUV以固定的转速按照任务设定的深度和航向航行,并在不同时刻给定不同的任务值。仿真时,以初始状态为0时刻,0时刻时,航向角为0°,UUV所处深度为0m,T=0-300周期内,期望深度为0m,期望航向为120°;T=300-1000周期内,期望深度为20m,期望航向为0°,T=1000-3000周期内,期望深度为45m,期望航向为270°。
设计的控制算法涉及的控制参数较多,主要控制参数为:控制周期T_c=0.15s,course_output_min=1.2,psi_output_min=4,course_error_int_max=9.2,psi_error_int_max=12,roll_max=10,psi_max=30,航向PID控制器参数分别为Kpc=-0.1,Kic=-0.05,Kdc=-1,LOS引导算法参数为Delta_min=5,Delta_max=10,k=1,俯仰角控制参数分别为Kpd=-0.4,Kid=-0.015,Kdd=-3。仿真结果如下图所示,图5、图6中,红色虚线部分为任务设定值,蓝色实现为UUV实际深度和航向。
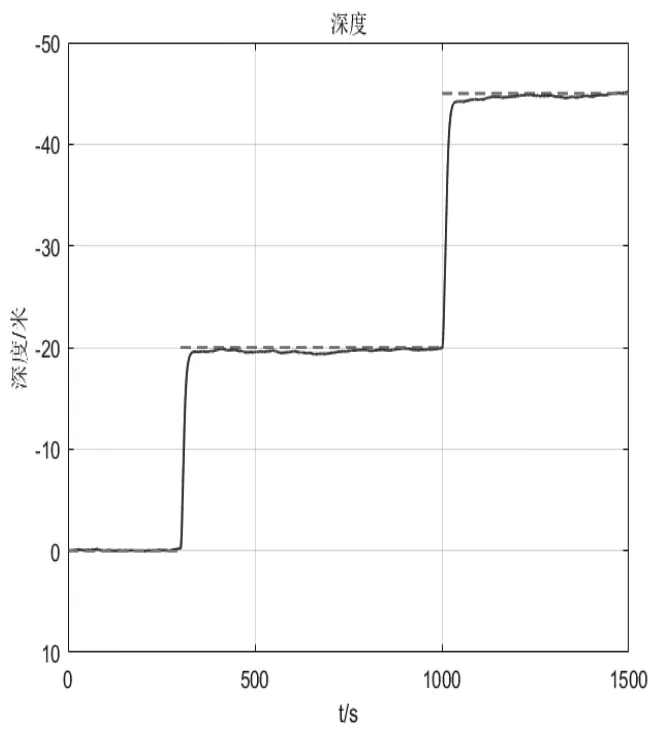
图5 UUV深度轨迹
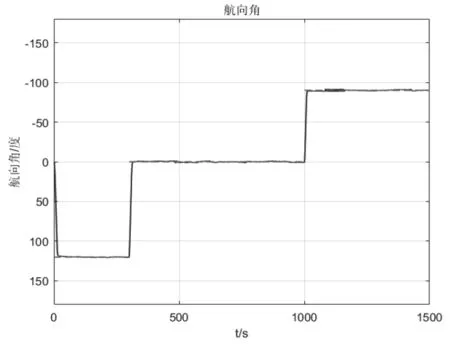
图6 UUV航向角
从图4可以看出,仿真过程中,UUV三维空间运动轨迹平滑顺畅,宏观上按照任务设定的航向和深度航行,航向和深度均能较快地达到期望值,且在稳定后能够长时间保持,没有明显的超调和振荡,从俯仰角曲线可以看出,在最大俯仰角的限制下,UUV俯仰角未出现超调和振荡,在设定深度突变时,俯仰角及时增大,快速下潜至指定深度并能及时矫正至水平状态,在期望深度附近保持水平的姿态航行。
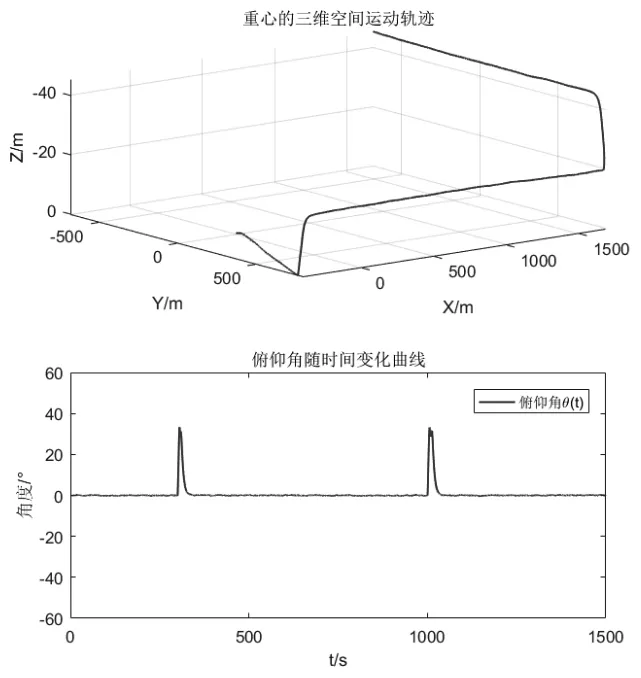
图4 UUV三维空间轨迹图及俯仰角
从图5和图6可以看出,得益于俯仰角的平滑控制,UUV的深度值和航向值均能跟踪任务设定值,响应速度快,无明显超调和振荡。
图7的舵角输出曲线表明,深度舵和航向舵输出平滑,大部分时间处在中位状态,也未出现左右舵或上下舵频繁交替的情况,在任务产生变化时快速响应,实现了对UUV深度和航向的有效控制,同时也有效地避免因打舵产生的机械磨损,减少能耗,保护舵的驱动机构。
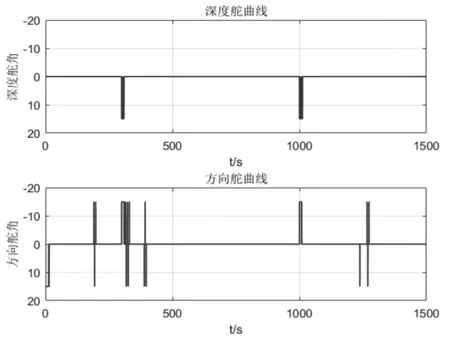
图7 舵角输出曲线
针对UUV水下航行控制问题,分别设计了航向PID控制器和基于LOS引导算法的深度PID控制器,其中深度控制器以俯仰角内环控制,外环为深度控制。在Matlab中的仿真结果表明,所设计的控制器能够较好地完成水下定深和定航向控制任务,具有响应速度快,超调量小,控制稳定,输出平滑等特点。
