舰基旋翼无人机的试验实况航拍应用研究
2021-11-02苏里阳陈实璇
田 政,苏里阳,陈实璇
(1.国家海洋技术中心,天津 300112;2. 中国人民解放军91550部队43分队,辽宁 大连 116023;3. 中国人民解放军32023部队,辽宁 大连 116023)
无人机(Unmanned Aerial Vehicle,UAV),具有使用成本低、机动灵活和超视距控制等特点,通过搭载不同类型载荷,可服务于实时监测、无线覆盖、搜索救援、商业表演、物流运输和精准农业等多个民用领域,亦可执行雷达欺骗、导弹诱饵、反潜作战、电子情报和侦查打击等军事任务[1-3]。随着无人机应用技术不断发展和低空空域逐步开放,无人机有望在不同的应用领域迎来新的机遇,在诸多行业中能够突破传统工作方式,有效降低风险、节约成本,在军用、民用等领域应用前景十分广阔。
航空拍摄又称航拍,是指摄像机位空中对地形地貌、城市景观和工程建设等地理形态进行摄影摄像以获取空照图的活动,具有高清晰、大比例尺和高现势性等优点,特别适合地理测绘、动态目标跟踪和快速动感效果影像获取,已在地理调查、农业作业、公共安全、国防事业和数字地球等领域得到应用[4-5]。
目前,航拍主要有两种方式:无人机航拍和载人机航拍。无人机航拍是指采用无人机作为空中平台,以机载摄影摄像设备为图像采集器,集成高空拍摄、遥测遥控、视频图像传输与图像处理的应用技术。无人机航拍转场高效便捷、操作灵活机动、人力经济成本低,在设计和最优化组合方面具有突出的特点,对拍摄主体影响较小,利于执行隐蔽、危险任务。载人机航拍是指摄影师携带影像记录设备位直升机、飞艇等载人飞行平台进行空中摄影摄像的特种作业形式。载人飞行平台作业半径大、留空时间长、飞行时速快、环境适应性强,可搭载大型专业摄录设备,摄影师能够根据预先设计或现场实际采用个性化拍摄手法,在拍摄高度、跨度、效率和成像质量上具有优势[6],但是存在飞行成本高,人力需空中作业,危险系数高等问题。
指挥决策提供重要判断依据。舰基试验实况航拍无人机可大视角、近距离观测海上运动平台试验实况,实时记录、回传关键目标环节实况信息,提供岸上指挥控制中心全方位试验现场实况信息,服务于试验组织指挥、结果评估和故障分析等全过程,是实现海上运动平台试验全过程可视化管理的重要手段。然而,当前利用无人机航拍对试验过程进行监控虽然有了一定的应用,但是并没有舰基结合应用的实例。鉴于目前航拍无人机上舰缺乏相关现实案例参考,本文对航拍无人机上舰问题进行了探索性研究,从起降方式、飞控等级和环境适应性等选型要素分析了适用舰基试验实况航拍无人机的应用特点,针对影响舰基旋翼航拍无人机现实应用的关键要素进行了重点研究,利用模糊综合评判方法建立舰基旋翼无人机飞行安全评估模型,克服了量化评估作业安全的难点,能够较好地评估舰基旋翼无人机海上作业的安全性,验证了航拍无人机上舰的可行性。
1 舰基试验实况航拍无人机应用特点
1.1 选型分析
无人机位空中拍摄海上运动舰船试验实况与陆基航拍不同,舰载航拍无人机工况环境复杂,并应具备较强的空中悬停拍摄能力,航拍作业风险等级高,对无人机平台的选型设计更具针对性,主要表现在以下几方面。
(1)起降方式
无人机续航时间有限,为保证视距内/外飞行安全,无人机应能够在目标试验船上灵活起降。水面舰船通常可提供无人机起降的场地空间较小,不利于配备复杂、大体积的发射回收系统,垂直起降是适用于航拍无人机上舰工作的理想起降方式。
(2)飞控等级
舰船本身是巨大的磁性物体,船体自身与其载有的各类型雷达与电台工作中会干扰无人机的通信系统。无人机通讯链路应该采用冗余设计,电磁兼容性要求高,飞控系统可靠性必须得到保证,至少达到工业级标准以上,且具备较强的智能飞行能力。
(3)环境适应性
海上环境复杂,无人机遭遇大风和扰流情况增多,空气中水汽含量丰富,空气相对湿度、盐度较大,在相对湿度达到80%时,常会有海雾出现,易对作业设备产生腐蚀作用。严酷的海上作业条件要求无人机具有较强的抗风性能和一定的防潮、防盐雾能力[7]。
综合考虑以上选型要素,兼顾航拍飞行器的经济性、安全性和易操作性,本文采用工业级电动多旋翼无人机用于航拍海上运动舰船试验实况。
1.2 系统组成
系统主要由旋翼无人机平台分系统、任务载荷分系统和控制传输分系统等3部分组成。系统组成如图1所示。
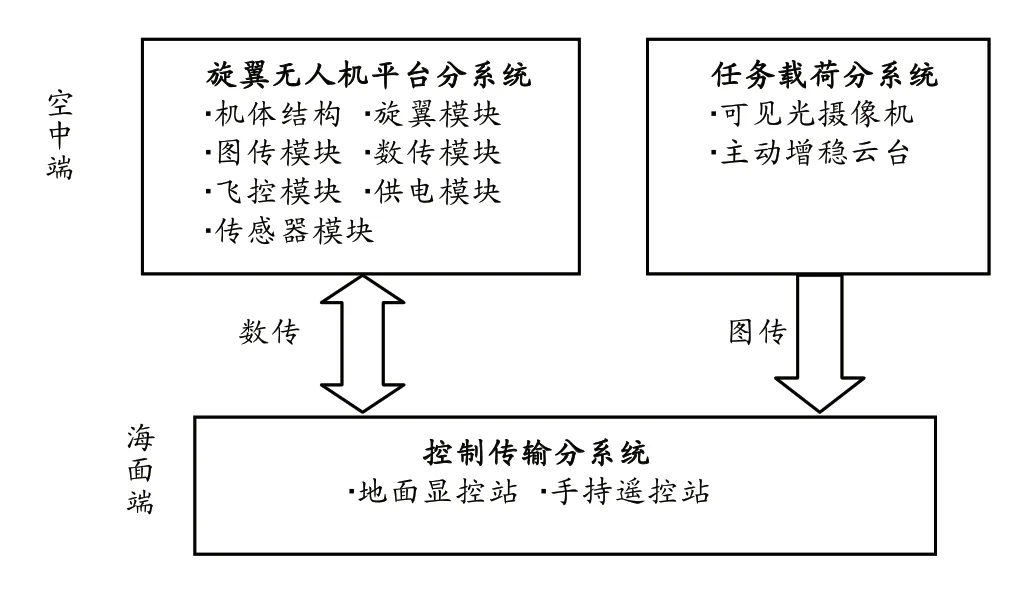
图1 系统组成图
旋翼无人机平台分系统由机体结构、旋翼模块、图传模块、数传模块、传感器模块、飞控模块和供电模块等组成,具备自主起降、定位悬停、伴随飞行、失联返航、低电报警返航和断桨保护等智能飞控功能,可在遥控与自主导航两种飞行模式下执行任务。平台配备意外坠海漂浮装置,确保无人机意外坠海后无人机平台及任务载荷能够安全回收,重要试验数据无丢失风险。
任务载荷分系统由可见光高清摄像机与主动增稳云台等组成。高清摄像机具有无级光学变焦拍摄高清图像能力;主动增稳云台可有效降低无人机飞行中高频、低频振动对拍摄的影响,使拍摄的画面清晰稳定,具备水平、俯仰和横滚3轴转向能力。
控制传输分系统由地面显控站和手持遥控站组成。地面显控站能够实现飞行任务设置,实时显示无人机的位置(经度、纬度、高度)、姿态角(俯仰、滚转、航向)、航速、电池电压、飞控通信链路质量参数和航拍实况图像;手持遥控站可带屏操作。
2 影响舰基旋翼无人机海上航空拍摄要素
2.1 环境调度
无人机在海上运动平台上起降和飞行受起降场地、海况等级和风力等级等多种因素影响[8]。应视无人机展开尺寸,合理选择起降区域,避开桅杆、线缆等障碍物,充分预留空间供无人机起降,一般以舰尾甲板为宜;实时关注舰船平台受浪涌影响情况,因浪涌作用,甲板长期处于6自由度运动状态,横摇、纵摇和升沉等3个自由度对无人机着舰影响最大,当舰船运动幅度超出允许边界时,如果强行降落,可能导致起落架受到严重撞击,甚至造成单点触舰而导致侧翻,因舰船摇摆和浪涌周期不同、互相抵消,舰船在每3—4个浪涌后会出现一个5~37 s的平静期,应避免无人机在平台摇摆/升沉幅度过大工况下完成起降操作,保证飞机硬件系统中的IMU、GPS和磁罗盘等传感器模块在相对平稳环境中完成初始化,通过飞控自检;实时利用测风仪测量风速、风向,考虑舰船航行风作用影响,不可直接采用气象风数据。当实测瞬时风速大于飞机最大抗风能力时,谨慎飞行操作,留出速度余量,上调报警电压,确保安全返航。风速矢量关系如图2所示。

图2 风速矢量关系图
2.2 视场选择
为获取最佳试验实况信息,应综合考虑拍摄需求、舰船航行以及无人机自身飞行控制等要素,无人机起飞后根据任务需要在空中作出定点悬停、伴航飞行和环绕飞行等动作,机载摄像机搜寻试验实况目标区域并拍摄成像,飞行高度选择应以达到覆盖试验现场全局、不影响舰船航行安全为原则,避免出现在舰船航线正上方和逆光拍摄位置,严格控制无人机飞行速度与舰船航行速度大体一致,利用地面设备严密监控无人机空中飞行状态以及与舰艇间相对位置,防止云台水平/俯仰调整加速度过大至图像模糊,调节镜头焦距获得适宜视场角后保持状态。以无人机位舰船正后方900 m,飞行高度200 m,两者保持相对静止,机载摄像机的最大视场角为50°×28°为例,根据几何关系可以算出,将试验目标调整至画幅下部时,系统拍摄纵向视场高度约为448 m,横向视场宽度约为839 m,为此状态下可覆盖最大视场。
2.3 手法应用
无人机航拍主要包含升降拍摄、平移拍摄、环绕拍摄和跟踪拍摄等4种拍摄手法[9]。升降拍摄构图连续转换,能够由近及远展现大范围场景/由远及近缩小展示范围直到停留在具体事物,适合表现人或物在环境中所处的位置;平移拍摄分为前后平移拍摄和左右平移拍摄,适用于表现距离长、面积大的拍摄对象,无人机保持固定高度飞行,拍摄镜头延伸感更强;环绕拍摄是指无人机以固定坐标点为圆心、一定距离为半径拍摄,适用于突出表现目标物体,可全方位展示前景,背景变化迅速,具有较强的视觉冲击效果;跟踪拍摄是指无人机跟随运动物体移动拍摄,可更为轻松锁定拍摄目标,到达摄影师难以接近的拍摄点,不受自然条件的限制而保持镜头的连续性。基于试验实况航拍的实际需求,针对海上作业现实特点,应主要采用跟踪拍摄与升降拍摄相结合的拍摄手法,以环绕拍摄和平移拍摄为辅助手段。
2.4 链路控制
试验实况航拍无人机的主要任务为在远程遥控状态下实时、稳定摄录回传试验实况视频数据。无人机图传是指采用视频压缩、信号处理和调制解调等技术将机载摄像机采集的视频数据以无线方式实时传送至远端接收设备的系统[10]。受舰载各类电子设备影响,无人机工作的频谱环境较为复杂,可预先利用便携式频谱仪测量空间频谱分布情况,按照现场实际,合理设置图传信号中心频率,避开舰载电子设备工作频段,保证回传图像质量稳定、可靠,带宽设置应防止过宽,保证信号能量集中,图传距离具备保障。无人机数传虽多为跳频设计,但数传频率可选区间有限,当外界频谱环境恶劣时,不应执行飞行操作。
2.5 模式设置
无人机在GPS定位模式下,磁罗盘参与工作用以定向。磁罗盘工作原理是利用地磁场固有指向性测量空间姿态角度,地磁场强度约为0.4~0.65 Gs,用于计算航向的水平分量十分小,易受外界磁性环境干扰影响。舰船本身主要由钢铁制造,会对周围磁场环境产生干扰,受到磁场的影响,导致方向传感错误,无人机会向某个方向漂移,产生碰撞风险,故磁罗盘校准应在无人机上舰之前完成,不要在建筑内或船边等强磁体环境下校准,并将起飞飞行模式设置为姿态模式,若无人机采用双GPS差分定向技术替代磁罗盘,则起飞模式设置可继续采用GPS定位模式。此外,因无人机起飞时会记录现有坐标为返航点,当舰船平台运动后,无人机坠海风险极高,应避免执行“一键返航”命令,并将无人机失控保护模式设置为“失控悬停”。
3 舰基旋翼无人机海上作业安全性分析
旋翼无人机海上作业飞行安全难度远高于陆上飞行,由于动态舰面效应、船上建筑干扰、舰船六自由度运动以及水文气象条件等各方面因素影响,无人机起降、飞行中易发生状态不稳和抖动现象,作业难度较大。
模糊综合评判方法能够根据实际需要,灵活构造模糊因素集、权集、评判集和综合运算模型,无人机自身、平台舰艇、海上环境和操管人员水平是影响其作业安全性的重要因素[11-12]。本文利用模糊综合评判法对旋翼无人机海上作业安全进行评估,建立模型如下:采用模糊综合评估法建立层次递阶图,目标层为旋翼无人机海上安全作业,第一、二层分别是4个关键影响因素与对应具体内容,详见图3。
为达成旋翼无人机海上安全作业目标,建立第一层指标集b={b1,b2,b3,b4},第二层指标集b1={b11,b12,b13,b14},b2={b21,b22,b23},b3={b31,b32,b33},b4={b41,b42},记第一层指标bi(i=1,2,3,4),bi包含的次层指标bij(1≤j≤qi),qi为bi包含的指标数,各层指标权重分别为wi、wij,满足:
评估方法中,先由底层基本指标来给出上层指标的评估结果,采取逐层向上方式,综合得到目 标能力的评估结果。确定评语集V= {V1,V2,....,Vn},评语Vg(1 ≤g≤n) 表示各指标评价等级,对应评价值可表示为p(V) = {p(V1),p(V2),...p(Vn)}。设指标bij(1 ≤j≤qi) 关于等级Vg的隶属度为rjg,则对指标bij的单因素评价为Rij= (rj1,rj2,...,rjn),从而可知第一层指标bi的综合评判矩阵为:
经模糊变换,可得Bi={bi1,bi2,...,bin} 。令
由式(3)可得评价对象的评价等级量化值,即最终评价结果。
设定海浪3级,风速10 m/s(逆风),能见度1.852 km,舰船平台运动速度10 kn,驾驶与勤务人员技能水平良好,无人机抗风等级不小于7级,具备北斗/GPS/GLONASS三模卫星导航定位、授时功能,图、数传频谱与船上大型通信设备不冲突,舰船甲板尺寸、安全支援措施等均满足无人机起降要求。
建立模糊综合评判模型对舰载旋翼无人机飞行安全进行评估。选取评语集为V={V1(很差),V2(差),V3(一般),V4(较好),V5(好)},对应评价分值分别为:0.1,0.3,0.5,0.7,0.9。舰载旋翼机安全飞行评估第二层指标的权重和在评语集上的隶属度如表1所示。首层指标的权重由专家直接给出w={w1,w2,w3,w4}={0.3,0.2,0.3,0.2}。
表1 舰载旋翼机安全飞行评估指标、权重和评语集隶属度的关系
由表1可得的综合评判矩阵如下。
b1={b11,b12,b13,b14}的综合评判评价向量B1=w1j,R1=(0.000,0.190,0.385,0.290,0.135)。同理可得:

舰载旋翼机安全飞行的综合评判矩阵为

综合评价向量B1=w1j,R=(w1,w2,w3,w4),R=(0.0255,0.1675,0.4080,0.2675,0.1315)。
4 结 论
本文基于无人机航空拍摄的一系列优点,对舰基试验实况航拍无人机的应用特点进行了分析,针对影响舰基旋翼航拍无人机现实应用的关键要素进行了重点研究,并利用模糊综合评判方法建立舰基旋翼无人机飞行安全评估模型,原理清晰,计算便捷,易于操作。所建模型能够较好地评估舰基旋翼无人机海上作业的安全性,为舰基试验航拍无人机的应用提供了可行性论证,进一步拓宽了航拍无人机的应用场景,具有一定的工程应用价值。可以预见的是,伴随无人机控制技术和舰机配合技术的日趋成熟,无人机的使用方法和使用场景也将更加多样化,无人机航空拍摄将在海上试验可视化保障中发挥重要作用。
