多用途港口门座起重机的设计
2021-10-26郝建光
郝建光
(太原重工股份有限公司,山西030024)
港口门座起重机是中小型多用途码头、港口的主要装卸料设备,可用于集装箱、散料、废钢铁、散装件等货物的装卸。随机可配备伸缩式集装箱吊具、抓斗、电磁吸盘、吊钩等多种吊装辅具。主机设多种接口,多用途港口门座起重机起重量为40 t,大于集装箱自重和吊具重量之和,抓斗、电磁吸盘的起重量限制在25 t。
1 多用途门座起重机的组成和主要技术参数
多用途门座起重机采用四连杆平衡配重式臂架系统,由起升、变幅、回转、大车行走机构、钢结构及控制系统组成,有足够的抗风、抗震、防碰撞、防倾覆能力,可水平变幅和360°回转。该机主要参数见表1,结构形式见图1。

图1 多用途港口门座起重机
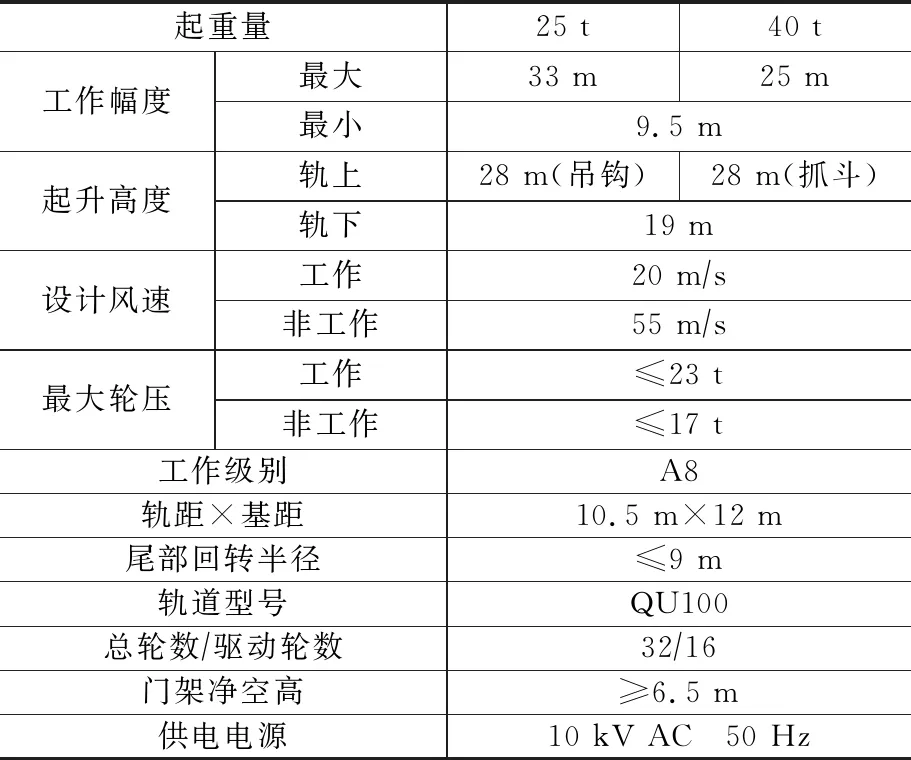
表1 门座起重机主要技术参数
2 集装箱吊具的功能及对主机的要求
集装箱吊具是门座起重机的吊具之一,用于集装箱的装卸。集装箱有A、B、C三种规格,相应尺寸(长×宽×高)为:12.192 m×2.438 m×2.438 m,9.125 m×2.438 m×2.438 m,6.058 m×2.438 m×2.438 m。对应额定重量(包括物品重量)为:30 t,25 t,20 t。集装箱吊具采用伸缩式结构,可满足A、B、C三种规格集装箱的吊装,吊具的伸缩、启闭、回转可在司机室操控。变幅能近似水平移动,象鼻梁端部定滑轮连到吊具的起升钢丝绳斜拉防摆,起升、变幅、回转过程中集装箱纵轴始终与轨道平行,满足集装箱进出集装箱船格栅导轨、堆垛定位和吊装效率。吊具有四个钢丝绳挂点,可360°回转,设微调功能,保证集装箱对位和起制动平稳要求。
3 起升机构
以集装箱为主、兼顾散货的门座起重机通常设两套起升机构,既可单动、又能联动。具有满载高速、空载低速及微调功能。两套机构前后平行布置,通过由编码器、PLC和变频器构成的控制系统实现两套机构同步运行和单独运行,满足通过机构实现抓斗升降、开闭动作的作业工况。机构前后布置,可减小转台宽度,方便机械室内电控设备布置。
4 四连杆臂架系统及变幅机构
变幅机构、四连杆臂架系统、臂架自重平衡系统是三个相互关联的系统,后者设计的越合理,前者的驱动功率就越小,运行也越平稳。
4.1 四连杆臂架系统
四连杆式臂架系统由臂架、象鼻梁和刚性拉杆三部分组成。象鼻梁端点指端部滑轮轴的轨迹是一条双叶曲线,臂架系统所选尺寸可以保证象鼻梁端点在变幅范围内沿接近水平线轨迹移动,高度波动范围不大于±200 mm。四连杆臂架的长度可通过图解法或解析法来确定。图解法是利用现有的一组合适的臂架数据,通过反求设计原理对它的结构参数、强度、刚度数据进行比照、优化,进而确定一组新臂架参数,完成臂架设计的方法。解析法则是通过四连杆臂架端点的运动轨迹方程,限定端点高度波动误差,对参数进行优化获得臂架设计数据的方法。借助MATLAB等软件,根据臂架结构的优化要求,如变幅中吊重产生的臂架力矩要小、高差误差要小、臂架和象鼻架长度要短等指标进行优化。
4.2 臂架平衡重系统
臂架平衡重系统是根据力矩平衡和能量守恒原理设计的。平衡重采用与臂架分离、用杠杆连系、绕铰轴摆动的活动配重结构,按臂架系统自重力矩尽可能等于平衡重自重力矩,变幅过程中臂架位能的增加(或减少)等于活配重位能相应的减少(或增加)值来设计。变幅过程中臂架和平衡重的合成重心高度会有波动,只能保持在接近水平线的轨迹上,尽量减小因重心升降需要做功引起的变幅机构功率增大。要保证臂架配重,无论是空载还是起吊额定载荷,当变幅制动器打开后会自动停止在最大幅度与最小幅度之间的某个位置。最少有一个位置点为四连杆机构的自平衡点;若四连杆机构设计较好,应有两个自平衡点,空载或起吊额定载荷时的自动停止位会非常接近,一个靠近最大幅度,另一个靠近最小幅度。
4.3 变幅机构
变幅机构由电动机、减速器、联轴器、制动器等部件组成。变幅驱动机构设在旋转立柱的变幅机构平台上,采用齿轮、齿条传动方式,通过上压轮、下托轮导向保证驱动齿轮与齿条的啮合。变幅阻力决定变幅电机功率的大小,它由重物非水平位移、臂架系统自重未完全平衡、作用在臂架上的风阻力和摩擦阻力组成。变幅机构虽然功率不大但工作频繁、速度高、线速度变化大,动载影响大,臂架系统必须有足够的刚度,保证作业效率和使用寿命。在整个工作幅度内,象鼻架端点在最大幅度的回转线速度是最小幅度的回转线速度的2.5倍,控制系统要综合考虑变幅和回转速度,并加以限制。
4.4 门座起重机结构设计
起重机结构寿命是起重机使用寿命的关键,港口门座起重机频繁吊运较重载荷,额定载荷只在集装箱满载时才会出现,整机工作级别A8。采用变频控制系统,在静挠度≤L/750时(L为轨距),满足使用定位精度可取。按刚度要求设计,满足使用寿命下的疲劳许用应力。起重机设计时的常用指标是使用寿命20~30年,结构设计时水平、抗扭挠度应满足以下要求:
回转支承面的挠度不大于D/1500(D为支承面直径);门架在垂直力作用下,横梁的跨中挠度不大于L/1500(L为轨距),端梁的跨中挠度也不大于L1/1500(L1为基距),这样可控制门架结构的总挠度f≤L/750。扭转刚度按门腿下端固结计算,在垂直于结构水平力的作用下,其水平变位δ≤H/700(δ为沿轨道方向及垂直于轨道方向的变位,H为从轨面到回转支承面的门架高度);臂架系统挠度控制在LB/700~LB/600(LB为臂架长度)之间。承载结构简单,受力明确,传力直接,过渡合理,能有效降低应力集中,提高抗疲劳能力。
4.5 设备的控制及安全保护系统
门座起重机采用电缆卷筒将10 kV高压电源引入起重机,经门架平台上的变压器向各机构提供380 V的三相电源。通过滑环受电器将电源由下部立柱引入上部转台,在象鼻梁端部设电缆卷筒向集装箱吊具等辅具提供电源。与传统桥、门式起重机相似,整机采用PLC控制系统和变频调速技术,起升机构设负荷显示、超载保护、起升上下限位保护,变幅机构设力矩限制、幅度显示、变幅限位,臂架顶部设航空障碍信号灯,机上设视频监控系统对各机构及码头场地进行监控,故障诊断系统可对各机构及大车行走夹轮器、锚定防风装置、超载、超速、短路、过流、过压、过热、失压、欠压、缺相、电源错相、漏电、变压器及PLC故障等进行监测诊断。
5 结语
由于门座起重机独特的结构形式、臂架系统和工作方式,使它与履带起重机、汽车起重机等臂架起重机相比明显不同。前者,频繁重载使用,A8工作级别,设计时重点考虑刚度和疲劳;而后者,工作级别均在A5以下,设计的重点是强度和稳定性。船运具有成本低、运输量大的特点,随着国民经济的发展、港口建设对门座起重机的需求也在增加,了解门座起重机的结构特点和设计要点,对设计和使用都是必要的。
