全向行走超前支架控制系统研究与应用
2021-10-25徐亚军张德生孙春广黄园月
徐亚军,张德生,孙春广,黄园月
1天地科技股份有限公司开采设计事业部 北京 100013
2煤炭科学研究总院开采设计研究分院 北京 100013
3鑫天地设备科技有限公司 天津 300454
4北京天地玛珂电液控制系统有限公司 北京 100013
目前,超前支架主要采用推移千斤顶作为行走部。超前支架在推千斤顶的推拉作用下顺序前移,这种移动方法的最大问题是支架前移时会反复支撑,破坏巷道顶板[1-3]。为此发明了全向行走超前支架[4],该支架采用螺旋推进器作为行走部,在乳化液马达的驱动下,支架能够前进、后退、平移、旋转,全方位行走,可以直接将最后一架支架移到超前支架组前方,通过尾架变首架的换位移架方式,有效解决了现有超前支架反复支撑破坏巷道顶板问题[5-6]。在实际使用中发现,现有的液压系统存在几个问题需要改进:由于乳化液马达驱动液压支架行走时回液管路压力较大,会对液压支架管路系统造成影响,液压支架经常出现伸立柱、收行走平台等误动作;乳化液马达需要设置简单可靠的制动装置,防止支架爬坡或旋转时出现误动作。为此,对全向行走式超前支架的液压系统进行了改进和优化,有效地解决了该型支架直线行走、支架千斤顶误动作和乳化液马达制动等难题,较好地满足了巷道支护需要。
1 全向行走超前支架结构特点与控制装置
1.1 全向行走超前支架结构特点
全向行走超前支架 (见图 1) 由全向行走部 (见图2) 和单元式超前支架 (见图 3) 2 部分组成。其中,全向行走部由螺旋推进器、乳化液马达、链轮、链条、轴承和行走平台组成,单元式超前支架由顶板、立柱和底座组成。2 台乳化液马达分别驱动螺旋参数相同但旋向相反的左右螺旋推进器 (左螺旋推进器为左旋,右螺旋推进器为右旋),通过左右螺旋推进器的转速和转向组合,实现超前支架全方位行走[7]。支架的移动方向与左右螺旋推进器旋向的关系如表 1 所列[8-9]。
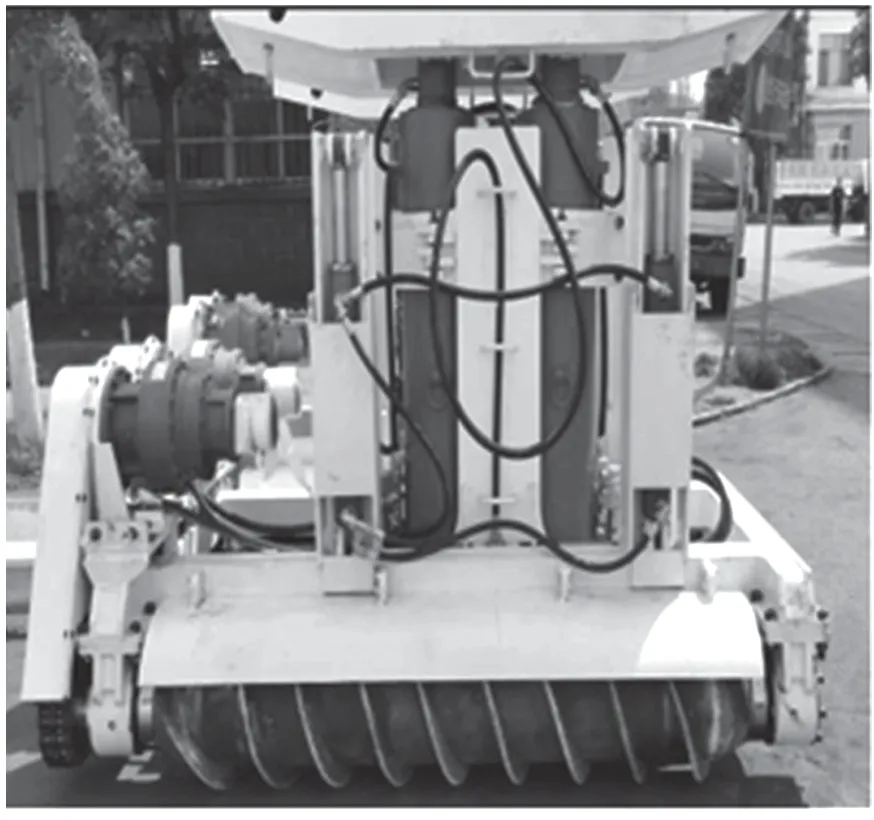
图1 全向行走超前支架Fig.1 Omnidirectional walking advanced powered support
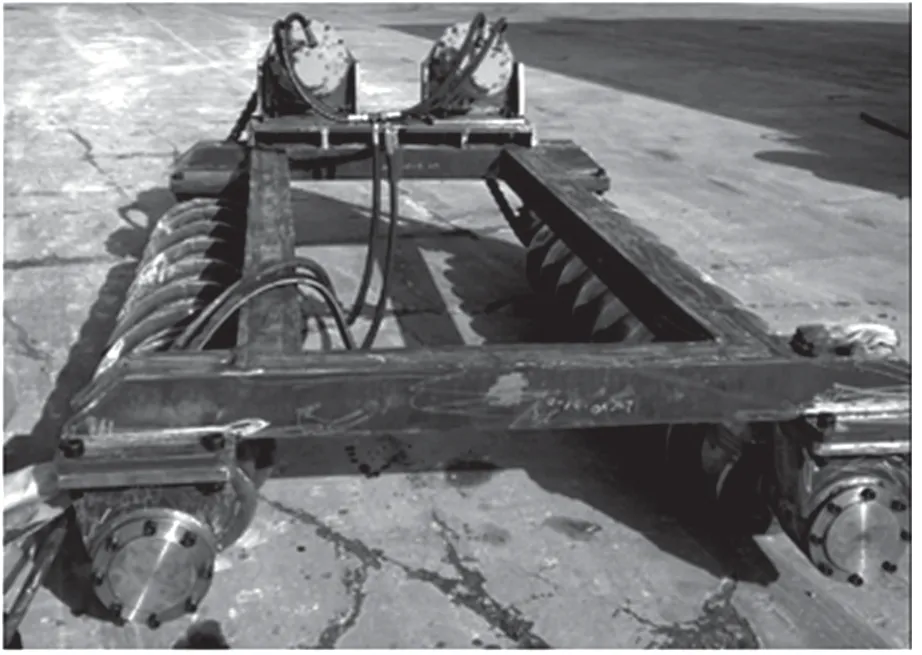
图2 全向行走部Fig.2 Omnidirectional walking unit
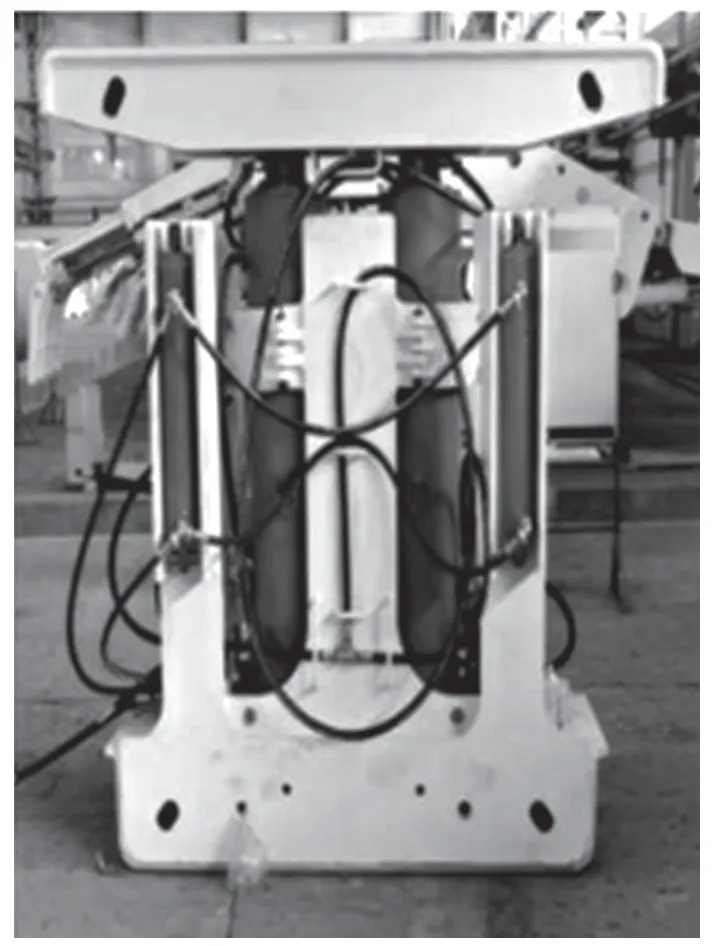
图3 单元式超前支架Fig.3 Unit advanced support
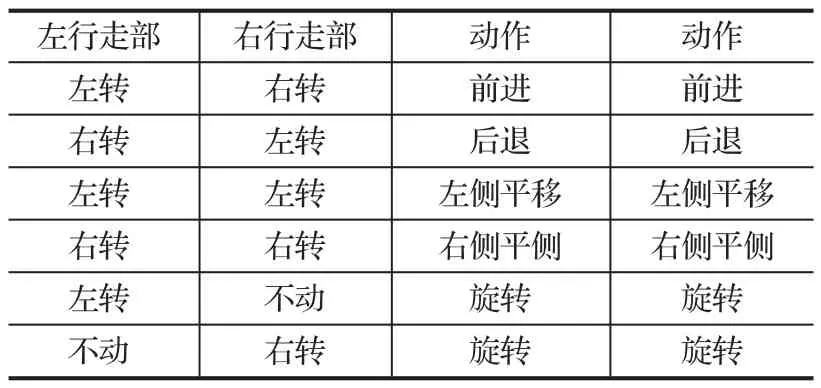
表1 全向行走支架的螺旋推进器动作组合Tab.1 Action combination of screw propeller of omnidirectional walking advanced powered support
单元式超前支架位于行走平台内部,通过 4 根举升千斤顶与全向行走部连接在一起,共同组成全向行走超前支架。超前支架行走时,先收缩立柱,将支架高度降到最低位置,防止支架行走时重心过高失稳倒架。当支架降到最低结构高度时,伸出举升千斤顶活塞杆,单元式超前支架底座离开巷道底板,螺旋推进器与巷道底板接触,在乳化液马达驱动下,螺旋推进器转动带动超前支架根据需要进行移动。为避免支架行走时接触到底板,底座与底板的间隙一般不小于300 mm。当超前支架行走到指定位置时,收回举升千斤顶活塞杆,螺旋推进器离开巷道底板,单元式超前支架底座巷道底板接触。当举升千斤顶活塞杆全部收回后,伸出立柱,让支架顶梁充分接触巷道顶板进行巷道支护。为防止支架支护承载螺旋推进器受力损坏,举升千斤顶活塞杆全部收回时,螺旋推进器与底板的间隙一般不小于 300 mm。
1.2 全向行走超前支架控制装置
全向行走支架是通过控制左右两侧螺旋推进器的转速与转向来实现超前支架前进、后退、平移和旋转等行走功能,因此须要研发合理的控制装置。为了避免人工近身操作,采用电液控制系统进行控制,利用遥控器进行操作。如图 4 所示,遥控器按键有支架动作控制和行走部动作控制 2 部分组成。其中,支架动作控制包括降前柱、升前柱、降后柱、升后柱、降平台、升平台;行走部动作控制包括前进 (左马达左转、右马达右转)、后退 (左马达右转、右马达左转)、左侧平移 (左马达左转、右马达左转)、右侧平移 (左马达右转、右马达右转)、旋转 (左右马达一个旋转,另一个不旋转),根据表 1 列举的组合方式控制超前支架行走方式。支架控制器上设有控制面板,除了遥控器外,支架控制器也可以对全向行走支架进行动作控制,其在支架上的安装位置和外形结构如图 5 所示。为简化超前支架结构,由 24 V、4 000 mA·h 隔爆直流稳压充电电源给电液控制系统控制器供电,其在支架上的安装位置和外形结构如图 6 所示。采用充电电源可以省去支架供电电缆,整个支架只有进、回液 2 根管路与外部相连,最大限度简化了支架管路系统。

图4 遥控器Fig.4 Remote controller
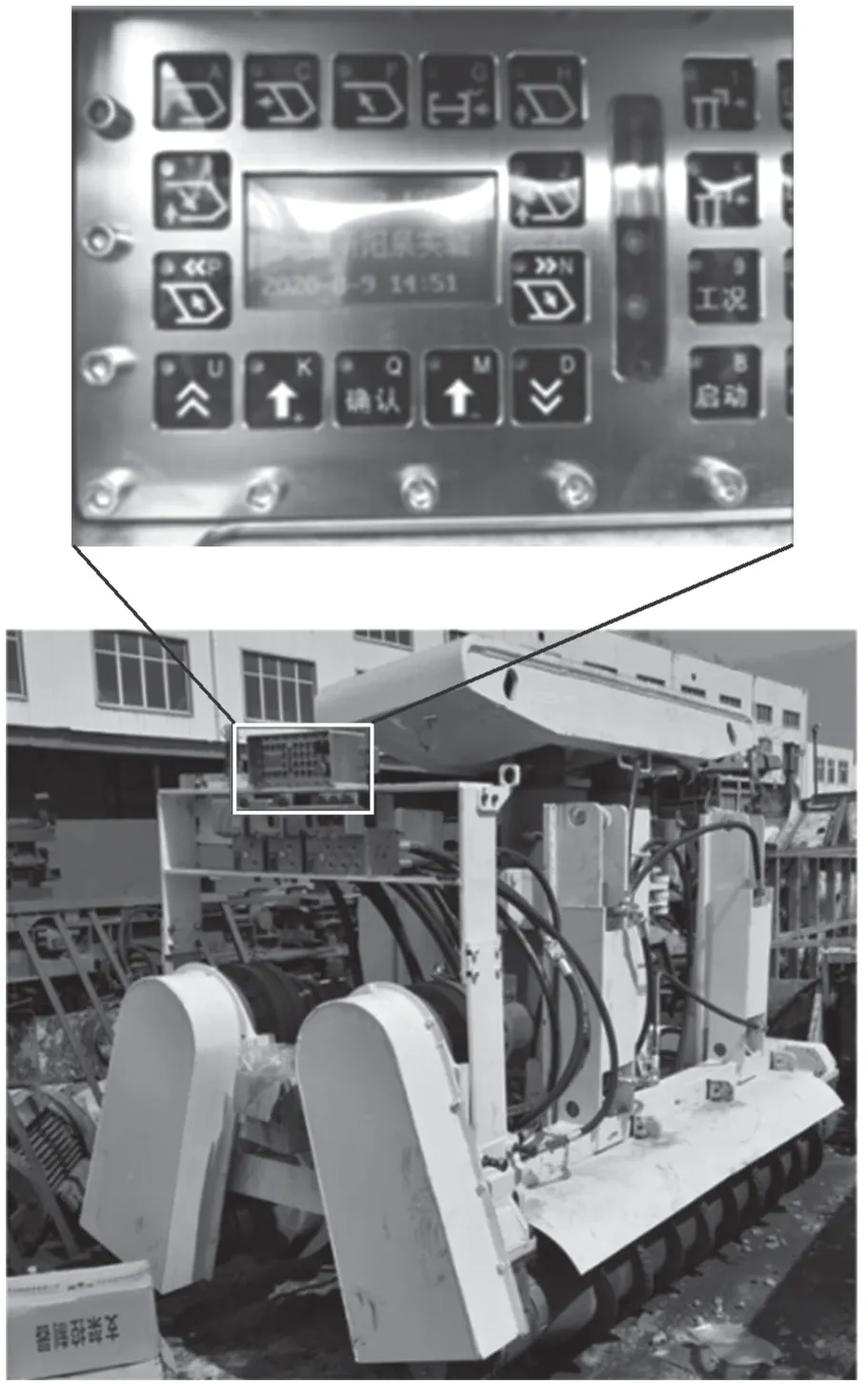
图5 支架控制器Fig.5 Support controller
螺旋推进器是通过流量来控制转速。研究表明,为了让螺旋推进器前进、后退时依直线行走,必须要保持左、右马达流量的一致性,为此在控制系统中加装了同步阀。最早加装了流量为 200 L/min 的同步阀,试验结果表明,同步阀有一定限流作用,最终选用流量为 400 L/min 的同步阀,实现了左右乳化液马达流量的均衡分配,超前支架前进、后退时基本可以保持直线行走,提高了超前支架行走能力与行走稳定性。
2 全向行走式超前支架液压系统结构与优化
2.1 全向行走超前支架液压系统
如图 7 所示,全向行走超前支架液压系统分支架动作控制和螺旋推进器动作控制 2 部分。其中,6 功能电液换向阀组主要进行支架动作控制,2 个 2 功能电液换向阀组主要进行左右螺旋推进器动作控制。支架动作控制分为升前立柱、降前立柱、升后立柱、降后立柱、升平台、降平台 6 个动作;螺旋推器动作控制分为马达左转、马达右转 2 个动作,通过表 1 所列的动作组合实现超前支架全方位行走。为了防止乳化液杂质对液压控制部件造成损坏,在支架进液管中设有过滤器。2 功能电液换向阀组进液口设有同步阀,利用同步阀让左右乳化液马达流量保持一致。在 4 个举升千斤顶进回液管路上设有双向液压锁,以保证升降平台在任何高度都能够悬停。前后柱进回管路设有液控单向阀,并配有压力表和安全阀,能够显示立柱压力。当支架达到工作阻力时,立柱下腔安全阀开启泄压,保护立柱结构不受破坏。

图7 全向行走超前支架液压系统原理Fig.7 Principle of hydraulic system of omnidirectional walking advanced powered support
液压系统主进、回液胶管规格为 DN25,电液换向阀进、回液胶管规格为 DN20,同步阀进口胶管规格为 DN25,出口胶管规格为 DN20,其他胶管规格如表 2 所列。

表2 全向行走超前支架胶管规格Tab.2 Size of rubber tube for omnidirectional walking advanced powered support
2.2 全向行走超前支架液压系统优化
试验表明,由于举升千斤顶的同步性要求不是很严格,无需采用同步阀来保证各举升千斤顶流量的一致性,其同步性可利用行走平台与超前支架的导向槽配合间隙进行调整。为了防止行走平台升降时支架摆动量过大,导向槽单侧间隙<3.5 mm。
实测数据表明,单个螺旋推进器动作时,回液管路的压力为 0~2 MPa;2 个螺旋推进器同时动作时,回液管路压力增大,最大可达 6 MPa。为防止回液管路压力增大引起液压支架立柱和举升千斤顶误动作,需要在液压支架回液管路与乳化液马达回液管路之间设置回液断路阀,利用回液断路阀使液压支架回液管路与乳化液马达回液管路分开,避免乳化液马达动作时支架误动作。
为防止螺旋推进器误动作,在乳化液马达端部设置制动装置。制动装置采用液压止动,利用交替单向阀进行控制:乳化液马达不动作时,交替单向阀不向制动装置供液,制动装置处于锁紧状态;乳化液马达动作时,交替单向阀向制动装置供液,打开乳化液马达制动装置,乳化液马达根据需要进行转动,实现液压支架行走动作控制。交替单向阀的特点是结构简单可靠,无论乳化液马达左转还是右转,都能打开制动装置;而乳化液马达不旋转时,能够有效地起到制动作用。
3 应用实例
2020 年在阳煤集团新元煤矿进行了井下工业性试验 (见图 8),达到了预期效果。回液断路阀有效地解决了支架和马达回液管路隔离难题,乳化液马达动作时,支架没有出现任何误动作现象。同步阀对左右马达流量控制效果明显,支架前进、后退和平移时基本依照直线行走,在 1 个机身范围内,支架前移时的最大偏移量约为 14 mm。交替单向阀对乳化液马达制动效果较好,支架旋转时,不需要旋转的乳化马达基本不转动,与其连接的螺旋推进器主要进行滑动,支架转动效果比较理想。
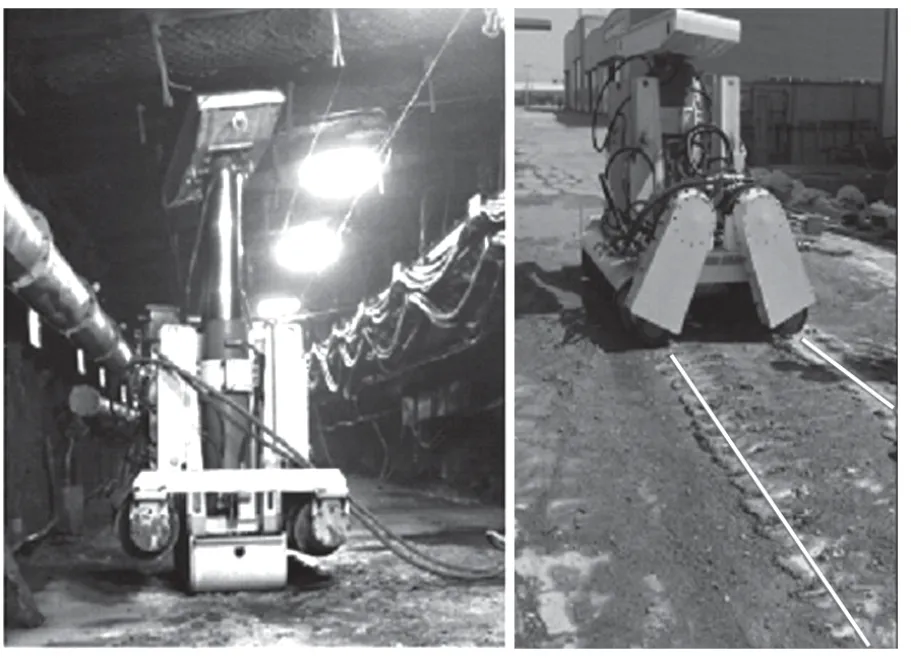
图8 超前支架现场试验Fig.8 Field test for advanced support
4 结论
(1) 由于乳化液马达流量较大,2 个马达同时动作时,回液管路压力较大,必须利用回液断路阀将支架回液管路与乳化液马达回液管路断开,以免乳化液马达动作时,支架的立柱和千斤顶出现误动作。
(2) 超前支架前进、后退时依直线行走的前提是左右螺旋推进器的转速需要保持一致,因此必须采用同步阀对左、右螺旋推进器进行均衡供液,以减小超前支架前移或后退时的偏摆量。
(3) 为了防止螺旋推进器误动作,乳化液马达必须要有制动装置。乳化液马达不动作时,与其连接的螺旋推进器处于锁紧状态;乳化液马达动作时,在压力作用下打开制动装置,与其连接的螺旋推进器可以左转或右转。实践证明,采用交替单向阀能够较好地解决该问题。
全向行走式支架利用螺旋推进器作为行走部,操作方便,只需控制左右螺旋推进器的转速和转向,就可以实现超前支架前进、后退、平移和旋转全方位行走,较好地解决了超前支架全方位行走难题。
