基于模型的多电飞机能源优化特性仿真分析
2021-10-22刘海港刘亮王鹏周维
刘海港,刘亮,王鹏,周维
航空工业沈阳飞机设计研究所,沈阳 110035
传统飞机二次能源主要为电能、液压能和气压能三种,为机载设备提供不同形式的能源[1-3]。提高能源利用效率是多电飞机(More Electric Aircraft,MEA)的重要发展目标之一,其中一个重要的内容就是采用电能来取代液压能、气压能,并通过系统集成控制实现能源的优化利用[4-6]。本文将采用基于模型的方法开展能源优化特性分析,并提出了一种电气设备的多物理域模型,能够实现不同机载系统的能源利用特性的大规模集成仿真。
在多电飞机中,飞控系统是实现多电化的重要机载系统,舵面由电能代替液压能进行驱动,执行装置采用电力作动器(Electric Actuator)[7-8]代替液压作动器(Hydric Actuator)[9-10]。因此以飞控系统为对象,构建仿真模型,仿真分析使用飞控系统在不同能源供能时,能源的传送、变换中的功率损耗等飞控系统能源优化特性。
1 飞控系统的能耗系统结构
飞控系统的主要能耗是为作动器提供能源,以驱动飞机舵面。此外,另一部分是能源变换、能源传送、作动器工作中的损耗[11-13]。
飞控系统的能源结构如图1所示,传统飞机采用液压能驱动飞机舵面,由液压泵实现发动机输出的机械能到液压能的变换,经液压管路传送到液压作动器,如图1(a)所示。而多电飞机更换为电能驱动舵面,由发电机实现发动机机械能到电能的变换,经电缆传递到作动器,如图1(b)所示。图中,ΔPi为散热功率。

图1 飞控系统的能耗系统功率流
多电飞机的电力作动器有两种,即机电作动器(Electromechanical Actuator,EMA)和电液作动器(Electrohydraulic Actuator,EHA),其重要的特点是在能源传送中实现电能的消耗[14-16]。
由上述所知,如果进行飞机能源利用特性的仿真,需要建立能源变换、能源传送和执行装置的能源利用特性的模型[17-18]。
2 机载设备的多物理域模型
较传统飞机相比,多电飞机增加了大量新型机载设备,均含有电子部件(包括功率电子部件和微电子部件)。这里以机电作动器作为典型电气设备来分析构建其多物理域模型。
2.1 机电作动器的结构与多物理域模型
2.1.1 机电作动器结构
机电作动器的原理框图如图2所示,其核心部件为无刷直流电动机,输出端的减速器由齿轮减速器与滚珠丝杠组成,将旋转运动变为直线运动,电源测电力电子装置由脉冲宽度调制(Pulse Width Modulation,PWM)控制的逆变器、电磁干扰(Electromagnetic Interference,EMI)滤波器组成,并通过嵌入式系统实现控制器的作动控制。
图2所示的机电作动器装置,从结构上可分为功率变换和信息变换两部分。
1) 功率变换部分
结构上由逆变器、电动机、机械装置和电源侧的EMI滤波器组成,其主要功能是实现电能到机械能的变换。与此同时,设备各部分均有功率损耗,将部分电能、机械能变换为热能,形成次要的功率变换过程。
2) 信息变换部分
结构上由控制器、数据采集和PWM信号发生器组成,主要功能是完成设备运行中的控制。除此之外,还可以实现设备运行状态的监控、与上位机和其他设备的通讯等功能。
2.1.2 多物理域模型的基本结构
提出的多物理域模型如图3所示,是将图2中电气设备的功率变换关系作为模型的重要组成部分,实现功率数据的传递,形成功率流;信息传递关系在根据参考信号完成对设备功率控制的基础上,提取状态信息,形成信息流。这里将功率变换的模型称为功率变换模块(Power Convert Model,PCM),而信息变换的模型称为信息变换模块(Signal Convert Model,SCM)。
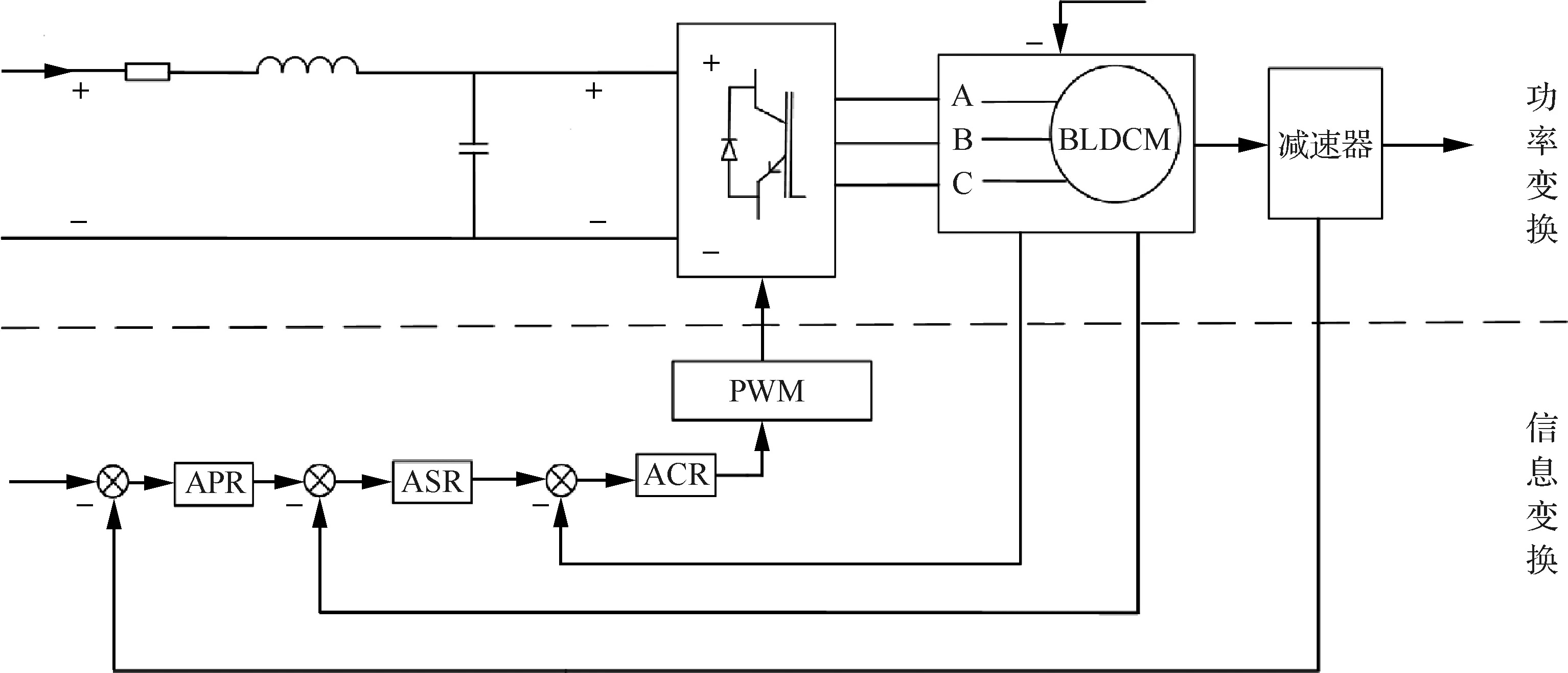
图2 机电作动器的结构

图3 电气设备的多物理域模型结构
2.2 模型的功率变换模块
图3中的功率变换模块(PCM)表现出电气设备实现的功率变换特性,是将一种物理域的能量变换为另一种物理域的能量(如发电机实现机械能到电能的变换),而用电设备是实现电能到各种形式能源的变换。因此,PCM将电气设备的运行过程表征为多物理域能源变换的过程,而SCM表征的是设备的控制方法和过程。
功率变换模块(PCM)如图4所示。其中Ys为输入功率(电源功率)的势变量,Xs为输入功率的流变量,YL为输出功率(负载功率)的势变量,XL为输出功率的流变量。功率损耗输出一般均为热功率,环境温度Tw为势变量,C为控制信号,损耗形成的热流Фw为流变量。

图4 电气设备PCM的变换关系
多电飞机能源系统涉及到电能、机械能、液压能、气压能和热能等功率类型,相应的势变量和流变量如表1所示。
表1中势变量和流变量应根据设备的性能、运行场景来定义,例如电动机输出功率也可以将电磁转矩作为势变量,旋转转速作为流变量,电流源的电功率也可以将电流作为势变量,电压作为流变量。
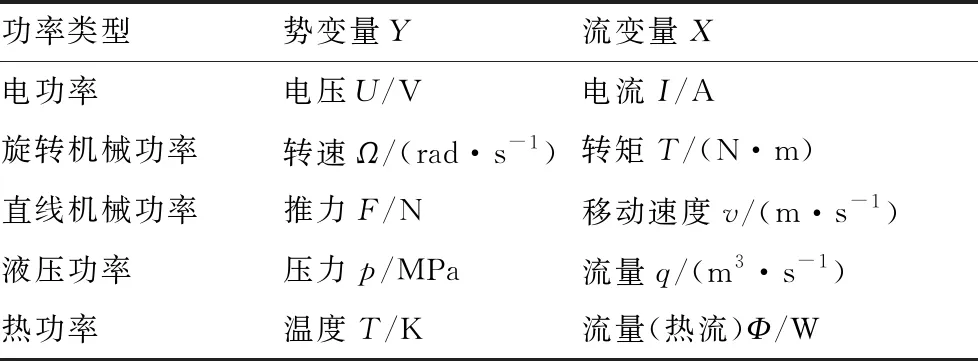
表1 不同功率形式的势变量和流变量
根据图4所示的功率变换模型(PCM)的输入/输出变量关系,用解析式方法可描述为
(1)
式中:传递函数W1(s)、W2(s)、W3(s)和W4(s)反映了功率变换过程中变量之间的动态特性。在进行系统集成时,输入和输出变量就是集成的接口变量,其中Ys和Xs与源端设备连接,YL和XL与负载端设备连接。
2.3 机电作动器的多物理域模型
这里以机电作动器(EMA)为例,构建多物理域模型。EMA是位置伺服控制系统,经减速器和滚珠丝杠输出功率,可用推力F和移动速度v描述,也可以用舵面旋转速度Ωa和舵面阻力矩TL描述。舵面旋转速度Ωa和舵面阻力矩TL描述的PCM如图5所示。
2.3.1 机电作动器的PCM模型
图5所示的PCM解析式可以表示为

图5 机电作动器的PCM
(2)
式中:G1(s)、G2(s)、G3(s)和G4(s)为EMA内部控制的传递函数;usc为电动机的控制电压;TLc为舵面阻力矩TL、机械装置的摩擦转矩和阻尼转矩之和。
2.3.2 机电作动器的SCM模型
EMA的信息变换模块(SCM)如图5所示,其实现舵面位置θa、电动机转速度Ωm=kΩΩa和电动机电枢电流Id的三闭环控制,其中kΩ为电动机角速度Ωm与舵面旋转角速度Ωa之间的等效减速比。信息变换模块(SCM)解析式为
usc=DUs=
(3)
式中:Wacr、Wasr、Wapr分别为电流、转速、舵面位置调节器的传递函数。SCM还可以包含模型仿真信号测量、与上位机等其他设备通讯等内容。
2.3.3 机电作动器的损耗模型
根据机电作动器的结构,功率损耗模型包括电力电子装置的损耗ΔPape、电动机的电磁损耗ΔPaem(包括铜损耗ΔPacu和铁损耗ΔPafe)和机械损耗ΔPam。对于该模型而言,电力电子装置的损耗主要决定于电枢电流,电动机的机械损耗主要决定于电动机角速度,其余影响因素对模型的准确度影响较小,模型中进行忽略。机电作动器的损耗模型可表示为
Φw=ΔPape+ΔPacu+ΔPafe+ΔPam=
(4)
式中:kape、kacu、kafe、kamc分别为电子损耗ΔPape、铜损耗ΔPacu、铁损耗ΔPafe和机械损耗ΔPam与电枢电流Is和电动机角速度Ωa之间的计算系数。
3 飞控系统设备的多物理域模型结构
3.1 含有SCM的多物理域模型
机载设备中含有闭环控制功能时,多物理域模型需要含有信息变换模块(SCM)。
3.1.1 直流发电机多物理域模型
绕线型270 V直流发电机由同步发电机和整流电路组成,通过控制同步发电机的励磁电流if,达到使输出电源电压稳定的目的[19-20]。直流发电机是将机械功率变换为电功率,其PCM模型如图6所示。输入机械功率的势变量为发电机转速ng,流变量为发电机的转矩Tg;输出电功率的势变量为电源电压Ug,流变量为用电设备的综合电流Ig。图7没有画出SCM部分,其控制功能是实现输出电压Ug的稳定在270V。

图6 直流发电机的PCM

图7 液压泵的PCM
直流发电机损耗在同步发电机发电机铜损耗ΔPgcu、发电机铁损耗ΔPgfe和机械损耗ΔPgm外的基础上,增加了整流电路损耗ΔPgr,其损耗ΔPgs可以表示为
Φw=ΔPgs=ΔPgcu+ΔPgfe+ΔPgr+ΔPgm=
(5)
式中:变量ig为发电机输出电流;ng为发电机转速;kgcu、kgfe为发电机的铜损耗和铁损耗系数;kgr为功率电子损耗系数;kgm为机械损耗系数。
3.1.2 液压泵多物理域模型
液压泵是液压能的变换装置,将发动机输出的机械功率变换为液压功率,其中输入机械功率的势变量为液压泵角速度Ωp,流变量为液压泵产生的转矩Tp,输出液压功率的势变量为压力pp,流变量为流量qp。液压源采用变量柱塞泵,SCM实现压力的测量,并且通过控制斜盘的角度γβ来控制排量Vpm,保证液压源压力pp的稳定。
液压能变换装置为液压泵,将发动机输出的机械功率变换为液压能,其功率损耗可以分为容积损耗ΔPhvp和机械损耗ΔPhmp两部分,可表示为
Φw=ΔPhvp+ΔPhmp=
(6)
由式(6)可见,容积损耗ΔPhvp与液压源的压力pp的平方成正比;机械损耗与液压泵的角速度Ωp成正比。航空采用的是恒压液压源,如果忽略液压泵角速度Ωp的变化,则损耗不会因为输出功率的变化而变化,即使在轻载或空载的情况下损耗也基本不变。
3.1.3 液压作动器多物理域模型
液压作动器由阀门控制引入液压源,驱动油缸中的活塞运动,进而驱动飞机舵面运动。液压作动器将液压功率变换为机械功率,即输入功率为液压功率,液压源压力pp为势变量,流量qp为流变量,而输出功率为机械功率,舵面推力Fa为势变量,舵面移动速度va为流变量,其PCM模型如图8所示。
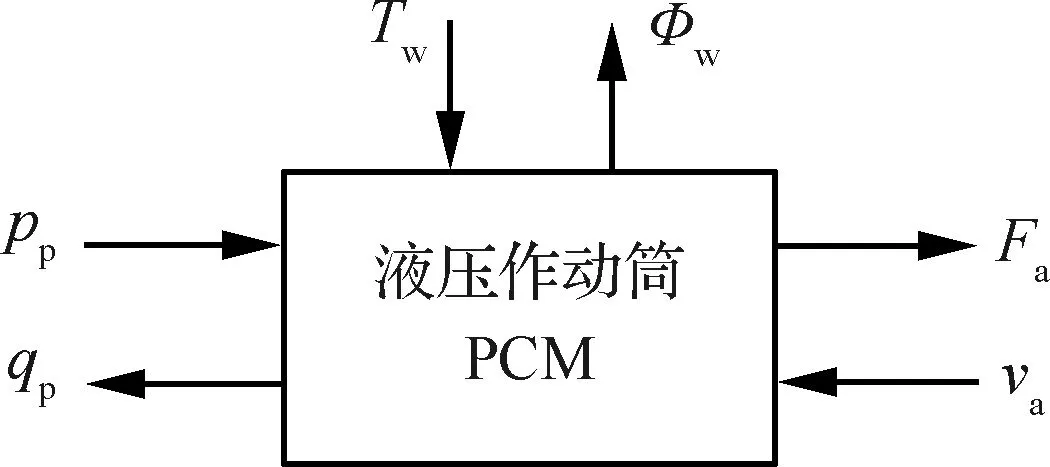
图8 液压作动器的PCM
液压作动器信息控制模块(SCM)的控制功能为测量移动位置,并根据移动位置控制阀门开关,即pp的ON/OFF。
液压作动器的损耗ΔPhas为油液泄漏损耗ΔPhyd和机械损耗ΔPham两部分,可表示为
Φm=ΔPhyd+ΔPham=
(7)
式中:λc为泄漏系数;Fhaf为作动筒的摩擦力;pa为作动筒活塞两边油缸的压力差,决定于液压源压力pp;va为活塞移动的速度。khyd、kham分别为泄漏损耗和机械损耗对应的损耗系数。液压作动器的泄漏损耗决定于液压源的压力,而机械损耗受作动器移动速度的影响。
3.2 不含SCM的多物理域模型
为了进行图1所示飞控系统的能源利用特性的仿真,电缆、油管路也需要建立相应的模型。而这种设备因为没有控制功能,因此没有SCM。
3.2.1 电能传送多物理域模型
电缆作为电能的传送设备,只是因有一定的电阻而产生损耗,仿真中也将其用标准模型来描述,如图9所示。PCM模型输入电功率的势变量为输入电压Us1,流变量为输入电流Is1;输出电功率,势变量为输出电压Us2,流变量为输出电流Is2。

图9 传输电缆的PCM
电缆电阻Rcs的PCM解析表达式为
(8)
3.2.2 油管路多物理域模型
油管路是液压源的传送设备,油液的黏性导致流动过程中产生阻力,进而造成液压源的压力损失。液压源的压力损失可分为沿程压力损失Δpλ和局部压力损失Δpξ,沿程压力损失是油液在等径直管流动时所产生的压力损失,而局部压力损失是油液流经局部障碍(弯管或接头)时的压力损失。油管路的PCM模型如图10所示,其中输入为液压功率,势变量为输入压力pp1,流变量为输入流量qp1;输出也是液压功率,势变量为输出压力pp2,流变量为输出流量qp2。

图10 油管路的PCM
油管路的PCM的解析式为
(9)
其中油管路功率损耗是由压力损失产生的,而压力损失Δp∑包含各段直管的沿程压力损失Δpλ和所有弯管或接头的局部压力损失Δpξ,表达式为
ΔpΣ=∑Δpλ+∑Δpζ=
(10)
式中:lh为各段油管路长度;dh为油管路的内径;ρ为液体的密度;vh为液流速度;λh为沿程阻力系数;ξh为局部阻力系数。
4 两种飞控系统的能耗特性分析
以一种5个主舵面的飞控系统为例,采用多物理域模型集成的方法,在完成某些飞行姿态的舵面控制时,对多电作动系统和传统作动系统的功耗特性进行仿真,并进行两种作动系统的功耗比较。
4.1 两种飞控系统的仿真模型与数据
4.1.1 基于多物理域模型的飞控系统集成
两种飞控系统均包括左右副翼、左右升降舵和方向舵5个舵面。如图11所示,采用机电作动器模型和电源模型组合成多电飞控系统;采用液压作动器模型和液压源模型组合为传统飞控系统。图中,Tg为发电机转矩,ng为发电机转速,Us为电源输出电压,Is为用电设备的综合电流,Usi为各电缆的输入电压,Isi为各电缆的输出电流;Tp为液压泵产生的转矩,np为液压泵转速,pp为液压源压力,qp为流量,ppi为各油管路的输入压力,qpi为各油管路的输出流量。
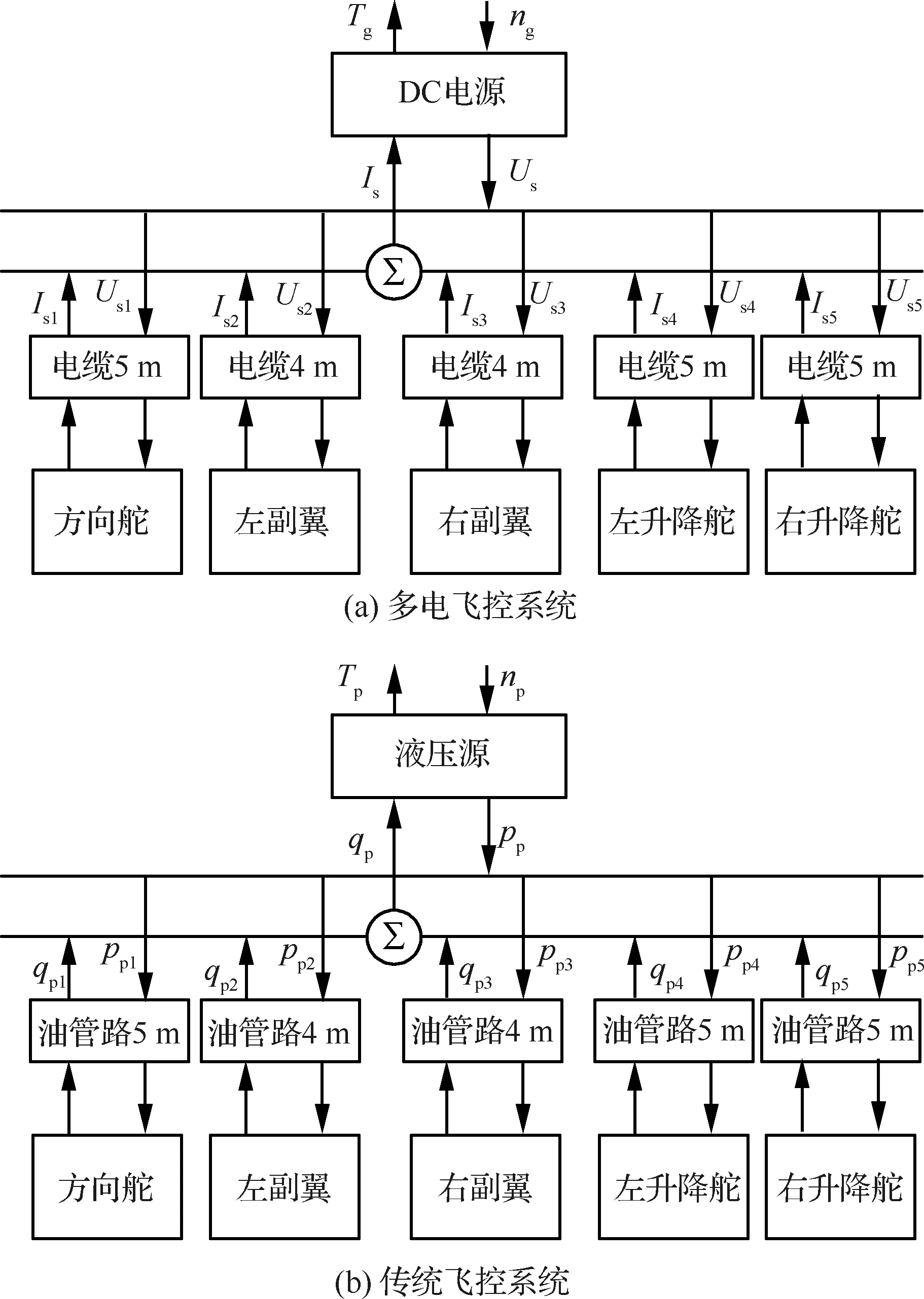
图11 作动系统结构仿真
图11中表示出各个作动器与电源/液压源的传输距离,设计电缆通过电流为50 A,油管路存在3个弯头,其中两个弯曲度为135°,一个弯曲度为90°。在多物理域模型集成中,势变量与流变量的计算为
(11)
或者
(12)
4.1.2 飞控系统设备参数
对于能源变换装置,发电机效率通常高于液压泵。为便于在额定状态下进行比较,将两种能源变换装置(发电机和液压泵)的额定功率和效率设置如表2所示。对于作动器,设定两种作动器模型的参数如表3所示。

表2 能源变换装置参数

表3 作动器参数
4.1.3 作动器功率特性
作动器实现的是位置控制,其功率特性如图12所示,虽然两种作动器的功率波形差别很大,但都属于短时的脉冲负载[21]。
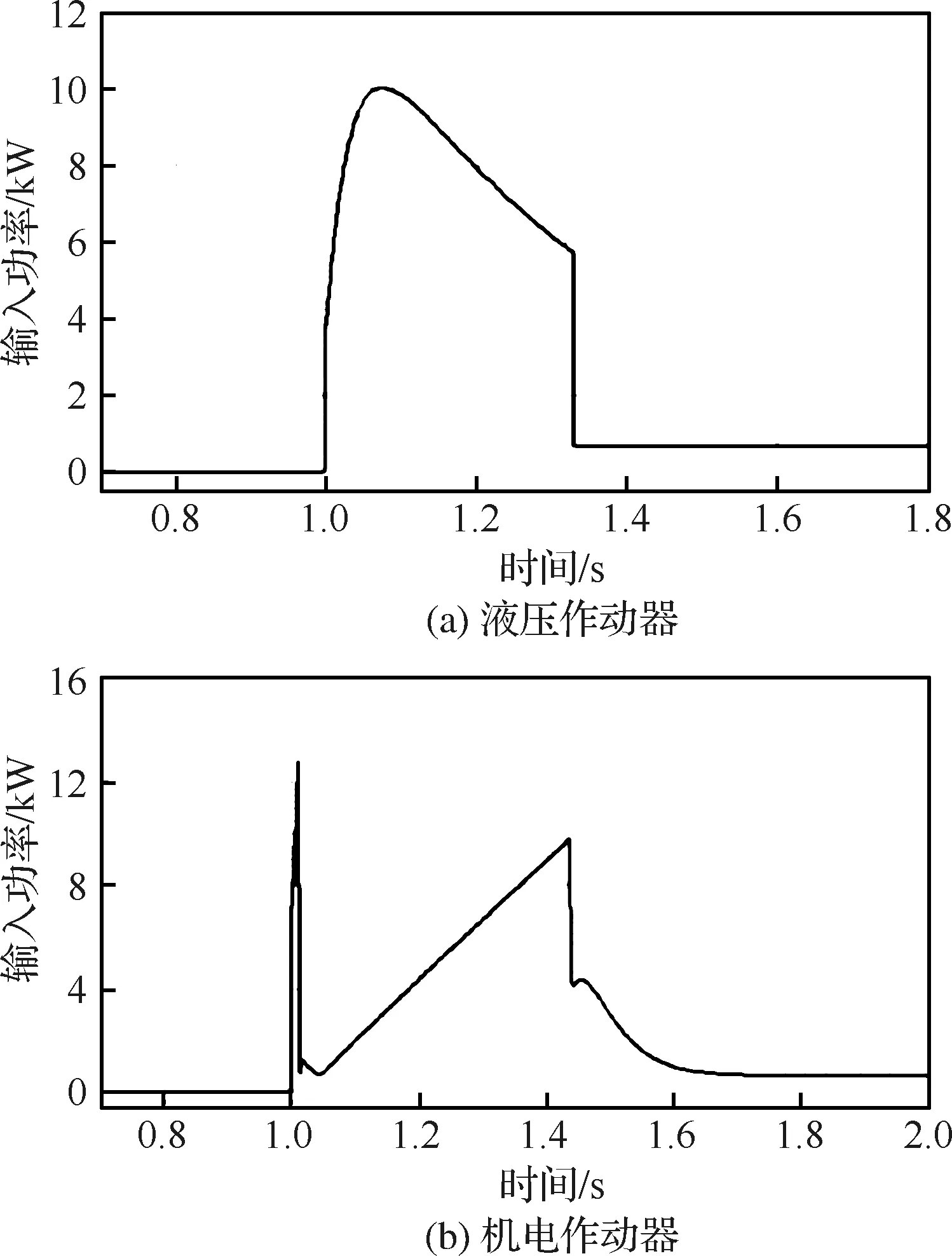
图12 脉冲形状的作动器输入功率
对于图12所示的脉冲功率特性,很难简单地用机电设备本身的效率(%)、功率损耗(W)来分析系统的能源特性,因此采用消耗能量(J)进行能耗特性分析。
4.2 作动系统的功率特性仿真
4.2.1 飞行剖面设置
假设飞机完成表4所示的爬升、横滚、偏航和俯冲4个飞行姿态,将不同舵面控制角度要求输入到图11的作动器上作为控制信号。由于采用了能量消耗进行能耗特性的比较与分析,仿真时设计的飞行剖面被压缩在很短的时间范围内(32 s)。
对表4所示的飞行剖面进行仿真,得到3种舵机的控制信号如图13所示。
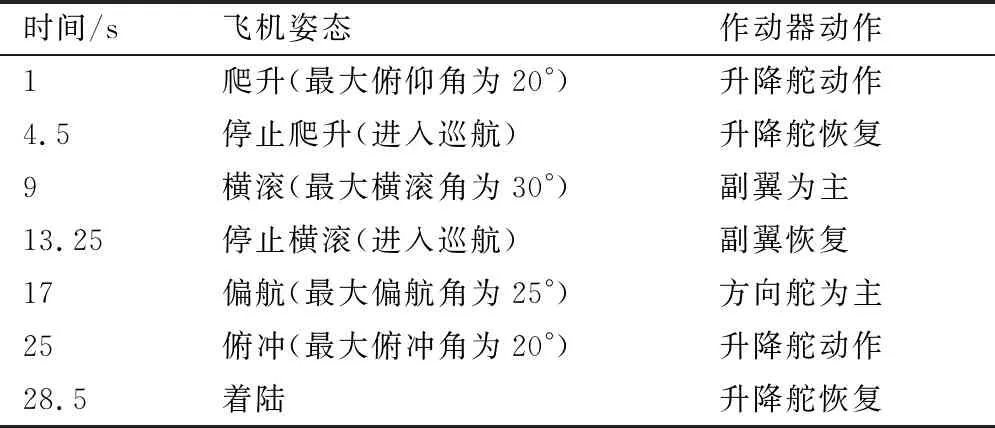
表4 飞机的飞行剖面

图13 3种舵机的控制信号
4.2.2 机电作动系统功率特性仿真
将图13的控制信号与图11(a)的作动器模型连接,进行多电作动系统功率特性的仿真,得到完成飞行任务的功率特性如图14(a)所示,而发电机从发动机传动机匣提取的功率如图14(b)所示。
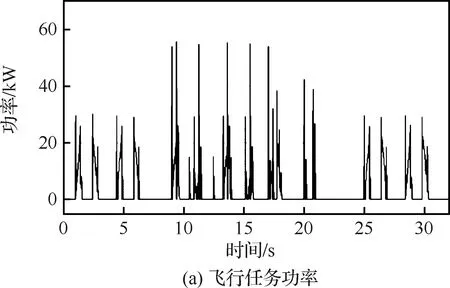
图14 多电飞控系统的功率特性
4.2.3 液压作动飞控系统功率特性仿真
将图13的控制信号与图11(b)的模型连接,进行传统作动系统功率特性仿真。得到完成表4的飞行任务的功率特性如图15(a)所示,而液压源从发动机传动机匣提取的功率如图15(b)所示。多电作动系统和传统作动系统的能源损耗对比数据如表5所示。
图15 传统飞控系统的功率特性

表5 两种飞机飞控系统的能源损耗
4.3 两种飞控系统能耗特性比较
根据表5的数据,多电飞控系统在能源利用上存在以下特点:
1) 因为完成相同的飞行任务,同时作动器的效率相近,作动器耗能的差别并不明显,对整个飞控系统能耗情况的影响不大。
2) 两种能源在传送中功率损耗的区别比较大,电缆的传输耗能常常可以忽略。而油管路传输损耗一般不能忽略。并且飞机越大,则传送距离越远、路径越弯曲,电能传送的优势会越明显。
3) 由于作动器表现的是脉冲负载,式(6)的液压泵的损耗不会因流量的减小而减小,而发电机的铜损耗会随电流平方降低,同时,当EMA/EHA负荷减小时,铜损耗、铁损耗和开关损耗还会进一步降低,这是多电飞机能够达到能源优化的主要原因。
由以上分析可知,对于作动器类短时工作的设备,采用电力驱动比采用液压能驱动,在能源利用上具有明显的优势。
5 结 论
1) 提出采用一种机电设备的多物理域模型,并集成为多电飞控系统和传统飞控系统,进行能源利用特性的仿真与分析。
2) 通过2种能源的作动系统耗能特性的仿真数据可知,对于作动器等短时脉冲工作设备,使用电能相比传统能源形式,在能源传送、能源变换、能源利用上具有很大的优势,能够实现节能目标。
