新型电力铁塔攀爬机器人的设计及攀爬步态分析
2021-10-20庄红军高宏力鲁彩江
刘 帅,庄红军,高宏力,鲁彩江
(1.贵州电网有限责任公司毕节供电局,贵州 毕节551700;2.西南交通大学机械工程学院,四川 成都610031)
1 引言
为确保高压输电线路稳定运行,需要定期检测和维护电力系统。人工检测输电线路时需要攀爬电力铁塔,该方法工作效率低,有高空坠落的风险[1,2]。因此,电力铁塔攀爬机器人的研制迫在眉睫[3,4]。它不仅能提高效率、降低高空坠落风险,而且可在不影响供电的情况下进行作业,具有广泛的应用前景。
目前,针对电力铁塔攀爬机器人的研究都未能推广应用。四川大学的陆小龙等人对电塔攀爬机器人进行了较多研究,设计了一种机械夹持机构[5]。后期他们又设计了一种直线推杆机构[1]。哈尔滨工业大学的科研团队模仿昆虫蠕动设计了一种电磁吸附攀爬机器人[6]。总的来看,运动方式主要为步进式和蠕动跨越式,静态定位方式主要为机械夹持式和磁吸附式。机械夹持式能稳定夹持,但结构复杂,夹持器通用性差:磁吸附式结构简单,但稳定性有待提高。此外,如何跨越电力铁塔上螺栓区等障碍物也是研究难点之一。现阶段的设计中,机器人夹持对象都是电力铁塔的角钢,尚未将角钢上的脚钉加以利用,利用脚钉攀爬能避开角钢上的众多障碍,具有研究价值。
这里参考了尺蠖攀爬步态,创新性地以角钢上的脚钉为夹持对象,采用机械电磁复合手爪的夹持方式,设计了一种新型电力铁塔攀爬机器人并对攀爬步态进行了分析。机械电磁复合手爪结构简单,可以在不光滑的角钢表面实现稳定夹持。以脚钉为夹持对象的机器人遵循设计的攀爬步态进行攀爬时,可以避开螺栓区、节点板等障碍物,解决了避障这一难题。
2 机器人攀爬对象的选取
电力铁塔一般由4根尺寸较大的主材角钢和一些用于斜拉支撑的辅材角钢构造而成[7]。主材与地基常呈80°倾角布置,布局较为简单:而辅材为各种角度的斜拉布置。主材与辅材、辅材之间都采用螺栓直接连接或者通过节点板连接而成。
沿着角钢棱线攀爬时,机器人运动过程中重心落在角钢上,运动较稳定,因此,选择棱线进行攀爬。如图1所示,电力铁塔的一条主材上设有脚钉供电力工人攀爬,脚钉在角钢两侧交替且均匀分布,脚钉伸出的长度远大于障碍物高度,以脚钉作为夹持对象,将大大简化机器人结构,解决越障难题。

图1 电力铁塔Fig.1 Electric Power Tower
综上,这里以主材角钢为攀爬对象,以主材角钢上的脚钉为夹持对象,沿角钢棱线攀爬。
3 攀爬机器人的机械结构设计
这里参考尺蠖攀爬步态设计了机器人主体,创新性地以铁塔角钢上的脚钉为夹持对象,设计了机械电磁复合手爪。
3.1 主体机械结构设计
攀爬机器人主体,如图2所示。包括前腕关节、中间关节、后腕关节三个转动关节,依照关节将其分为前手爪、前臂、后臂、后手爪。前臂装有摄像头用来观察工作环境并将其传输至地面,后臂上的电池可以为机器人提供电能,实现机器人离地工作。

图2 攀爬机器人模型Fig.2 Model of Climbing Robot
如图3所示,前、后腕关节分别由单独的电机直接驱动,调节前、后手爪的俯仰角度。中间关节的运动由安装在后臂内部的电机驱动,电机通过齿轮带动丝杆转动,螺母沿着丝杆上下移动,中间关节驱动杆位置的变化可以改变两臂的夹角,即利用电机的正反转调节中间关节的角度大小。

图3 攀爬机器人内部结构Fig.3 Internal Structure of Climbing Robot
3.2 机械电磁复合手爪的设计
现阶段静态定位主要分为机械夹持和磁吸附两种方式,机械夹持稳定性好,但结构复杂,电磁铁吸附结构简单,但夹持不稳定。综合两者的优点,这里设计了一种机械电磁复合手爪。
手爪主要包括纠偏装置、足架、电磁铁和机械爪,结构如图4所示。足架一端与机器人的前后臂相连,另一端连接电磁铁和机械爪。手爪前端的纠偏装置呈90°,可与角钢两侧面完全贴合起到导向作用,当手爪轻微偏离角钢棱线时,也可起到纠偏作用。电磁铁选用条形电磁铁,两电磁铁呈90°且与角钢两侧面贴合。手爪两侧各有一个机械爪,左右完全对称。因为主材角钢上的脚钉左右交替分布,对称设计可保证必有一侧的机械爪夹持在脚钉上,同电磁铁与角钢的两个接触点共同构成一个三角形,保证了夹持的可靠性。手爪夹持状态,如图5所示。

图4 机械电磁复合手爪Fig.4 Mechanism-electromagnetism-combined Gripper

图5 手爪夹持状态Fig.5 Clamping State of Gripper
机械爪由齿条、齿条外壳、夹爪、连杆和定位杆组成,采用对称设计,如图6(a)所示。机械爪的开合由齿轮齿条机构实现,安装在足架上的电机带动齿轮转动,齿轮带动两个齿条同时向外移动,夹爪张开松开脚钉,反之则夹爪闭合夹住脚钉:连杆和定位杆的主要作用是对脚钉进行定位,定位杆一端与夹爪铰接,另一端与连杆通过销连接,连杆另一端与齿条外壳铰接,销能在定位孔中自由滑动。如图6(b)所示,夹爪闭合过程中,销沿定位孔向外滑动,带动定位杆向内闭合,夹爪夹住脚钉时,定位杆的圆弧状末端刚好与脚钉完全贴合并将其定位。
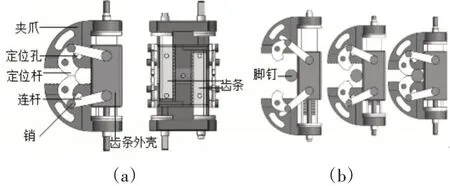
图6 手爪上的机械爪Fig.6 The Clamper on the Gripper
3.3 关键受力部件有限元分析
为了保证机器人安全可靠地工作,对足架和中间关节驱动杆两个关键受力部件利用Workbench进行有限元分析。两个部件均采用6061铝合金,取安全系数为2,则许用应力为27.6MPa。网格划分采用四面体法并指定网格大小为1mm。
足架:在足架与机械爪的接触面添加固定约束,在足架与臂连接的孔内施加重力载荷。如图7所示,足架最大形变量为0.009mm,最大应力4.814MPa<27.6MPa,满足强度要求。

图7 足架位移云图及应力云图Fig.7 Deformation and Stress Figure of Gripper Frame
中间关节驱动杆:在驱动杆下端孔添加固约束,在上端的孔内施加重力载荷。如图8所示,最大形变量为0.550mm,可以安全工作:最大应力19.433MPa<27.6MPa,满足强度要求。

图8 中间关节驱动杆位移云图及应力云图Fig.8 Deformation and Stress Figure of Connecting Rod
根据有限元分析结果,可以看出机器人的机械结构设计满足强度要求,可以安全工作,设计合理。
4 机器人攀爬步态分析
攀爬机器人的首要任务就是攀爬电力铁塔,以脚钉为攀爬对象可以避开螺栓区、节点板等障碍物,故只需考虑攀爬步态。机器人需要调整前腕关节、中间关节、后腕关节三者协调运动才能实现机器人的攀爬功能,因此有必要对机器人的攀爬运动进行运动学建模,并且进行相应的运动学分析与仿真。
4.1 攀爬步态设计
攀爬步态的设计是机器人运动学分析的基础,机器人攀爬步态如图9所示。

图9 机器人攀爬步态示意图Fig.9 Climbing Gait of Climbing Robot
Step1:机器人前后手爪电磁铁通电,机械爪闭合,前手爪紧紧夹持在2号脚钉上,后手爪夹持在1号脚钉上;
Step2:后手爪夹持状态不变,前手爪电磁铁断电且机械爪张开,前、后腕关节以及中间关节协调配合运动,使得前手爪松开2号脚钉,离开电力铁塔并向上迈动;
Step3:前手爪夹持到3号脚钉上,前手爪电磁铁通电且机械爪闭合,此时,机器人前后手爪紧紧夹持在脚钉上;
Step4:前手爪夹持状态不变,后手爪电磁铁断电且机械爪张开,前、后腕关节以及中间关节协调配合运动,使得后手爪松开1号脚钉,离开电力铁塔并向上迈动;
Step5:后手爪夹持到2号脚钉上,后手爪电磁铁通电且机械爪闭合,此时,机器人前后手爪紧紧夹持在脚钉上;
至此,机器人完成了一个攀爬步骤,以此循环。
4.2 攀爬运动学模型的建立
攀爬过程中,典型姿态为后手爪夹持在角钢上,前手爪腾空,以机器人后腕关节为基坐标系进行D-H建模[8]。这里采用改进D-H参数法建立连杆坐标系[9],如图10所示。

图10 攀爬机器人D-H模型Fig.10 D-H Model of Climbing Robot
通过建立连杆坐标系得到D-H参数表,如表1所示。

表1 D-H参数表Tab.1 D-H Parameter Table
4.3 攀爬运动学分析
根据图10连杆坐标系建立连杆i对连杆i-1相对位置的齐次变换矩阵

展开,得
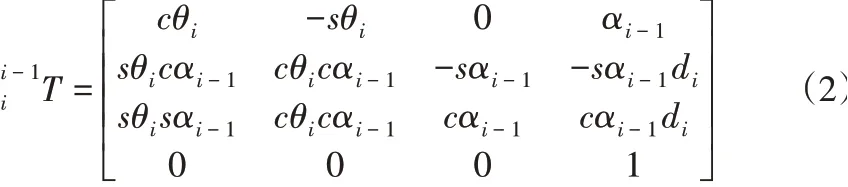
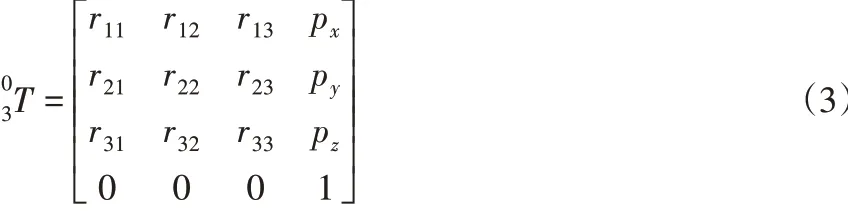
其中,

方程(3)构成攀爬机器人的运动学方程。
4.4 攀爬运动学模型的验证
采用的验证方法为给定关节的变量值,代入运动学方程中求解相应位姿坐标,再代入Robotics Toolbox求解相应位姿坐标,若结果相等,则运动学模型正确,否则模型错误。
对各关节变量赋值:θ1=π/3,θ2=-2π/3,θ3=-π/6,代入式(3)得出机器人前手爪相对于基坐标系的位姿r11=0,r12=1,
在Robotics Toolbox中建立一个3自由度机械臂模型,命名为“攀爬机器人”。定义初始位姿为[π/3,-2π/3,-π/6],得到如图11(a)所示的运动学模型。调用fkine()函数进行正运动学分析,可得机器人前手爪相对于基坐标系的位姿矩阵为:

图11 攀爬机器人运动学仿真Fig.11 Kinematics Simulation of Climbing Robot

式(4)与运动学方程求得的解一致,故运动学模型正确。
4.5 攀爬运动学仿真
机器人初始位置的关节变量为[π/3,-2π/3,-π/6],终止位置关节变量为[π/6,-π/3,-π/3]。在Robotics Toolbox生成3个关节的位移、速度、加速度曲线[10],如图11(b)、(c)、(d)所示。
可以看出:攀爬机器人在攀爬过程中各个关节运行平稳,曲线平滑,不存在奇异点。而且,机器人各关节在攀爬过程中没有刚性冲击和柔性冲击,满足机器人的控制要求,设计合理。
5 结论
针对危险系数高的电力铁塔作业,这里设计了一种新型电力铁塔攀爬机器人并且分析了攀爬步态。创新性地将电力铁塔角钢上的脚钉作为夹持对象,采用机械电磁复合手爪,简化了机械结构。然后通过Workbench对关键受力部件进行有限元分析,利用MATLAB里的Robotics Toolbox验证了改进D-H参数法所建攀爬运动学模型的正确性并且进行了运动学仿真,结果证明了机器人机械结构以及攀爬步态设计合理,为轨迹规划和动力学研究奠定了基础。新型电力铁塔攀爬机器人提高了夹持稳定性,解决了避障难题,在攀爬过程中各个关节运行平稳,无刚性冲击和柔性冲击。攀爬机器人可以保障电力工人的人身安全,提高电力检测的效率,具有广泛的应用前景。
