MIMU中加速度计组离心机标定补偿技术研究
2021-10-15张睿哲刘玉县何春华庄捷辉
张睿哲,刘玉县,何春华,庄捷辉,吴 涛
(1.汕头大学 工学院,广东 汕头515000;2.北京大学 微电子学研究所,北京 100871)
0 引 言
微惯性测量单元(micro inertial measurement unit,MIMU)内部三个相互正交安装的加速度计,通常为导航系统提供载体相对于导航坐标系三轴方向的加速度,是导航系统的重要组成部分。为提高导航系统的工作精度,需对加速度计进行标定,获得加速度计零偏、标度因数、集成安装误差及交叉耦合系数,以对加速度计误差进行补偿。
目前加速度计标定方法有两种,重力场标定和离心机标定。重力场标定范围局限于±1gn以内[1~5],无法满足大量程加速度计高阶非线性系数标定的需求。而离心机标定虽能持续提供大于1gn的加速度输入激励,但与重力场标定相比,存在新的问题,即现有离心机标定方法[6~12]未考虑到离心机标定时,内部加速度计集成安装误差及MIMU安装误差,导致加速度计实际受到的离心加速度激励与设置不一致,引入输入误差,影响标定精度。如何消除加速度计输入误差成为其重点和难点。
针对上述问题,本文提出一种消除加速度计输入误差的标定分析方法。方法基于离心机标定时MIMU中加速度计正反向输入状态下安装误差对称的关系,在误差模型方程中引入安装误差项,通过两种状态下输入取代数平均,消除安装误差项。利用最小二乘法解得加速度计组误差模型系数,对加速度计组进行补偿。
1 加速度计组误差建模
MIMU中三个单轴加速度计配置在立方体基座的三个正交面上。考虑加速度计零偏、安装误差、非线性误差,忽略四阶以上的动态小量误差,加速度计组误差模型为
(1)
式中a为加速度计最终输出的加速度信息;U为加速度计输出的电压信息;a0为零位误差;k1,k2,k3为交叉耦合系数,标度因数及非线性误差矩阵;下标x,y,z为x,y,z轴加速度计的输出。由于加速度计组高阶矩阵中对角线元素是小量,非对角线元素相对于对角线元素而言是二阶小量,在标定补偿中可忽略,因此k2,k3矩阵是一个对角矩阵。
2 消除输入误差的标定方法分析
结合图1,设加速度计的检测质量质心O3与离心机旋转中心O1之间的距离为R3,随动台旋转中心O2与离心机旋转中心O1之间的距离为R2,安装俯仰失准为角α,安装方位失准角为θ,令ΔR=R2-R3。
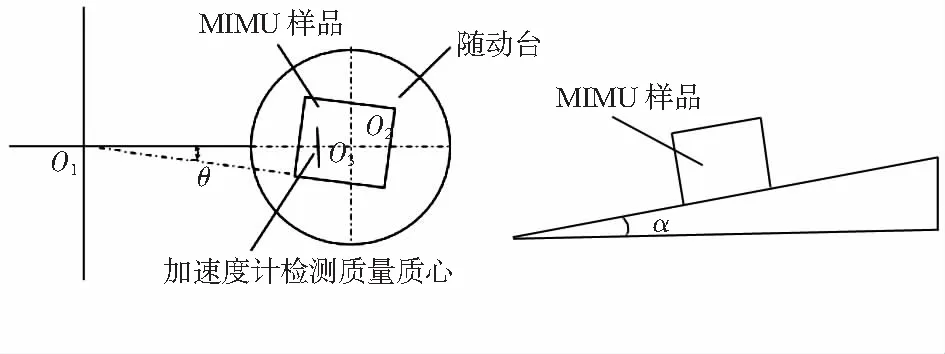
图1 MIMU安装示意
理想情况下,O3应与O2重合,加速度计敏感方向应与O1O2共线,此时离心机转动时实际施加到加速度计上的离心加速度就与离心机预设的输出加速度相同。但实际试验过程中,由于加速度计集成安装误差及MIMU安装误差的影响,O3与O2-并不能重合,加速度计敏感方向无法与O1O2共线。ΔR,θ及α通常情况下都不等于0,此时对于某一次试验(以x轴加速度计敏感方向与离心加速度同向为例),输入的加速度向量[ax+ay+az+]由理想情况下的[Rω20gn]变为[(R+ΔR)ω2cosθcosα+gnsinα(R+ΔR)ω2sinθgncosα],由于θ,α以及ΔR未知,因此,会在标定结果中引入相关误差。
考虑到θ和α为小量,则1-cosθ,1-cosα为二阶小量,可认为gncosα≈gn,(R+ΔR)ω2cosθcosα≈(R+ΔR)ω2。但sinθ≈θ,sinα≈α,为一阶小量,不能忽略,于是,输入的加速度向量经化简为[(R+ΔR)ω2+gnα(R+ΔR)ω2θgn],可看出,此次试验会引入加速度计输入误差并影响零偏、标度因数、交叉耦合及高阶非线性项。可得1°的θ角便会给x轴加速度计带来17.5 mg的零偏,这是无法接受的。

由上述可知任何一个加速度输入向量[ax+-ax-ay++ay-az+-az-],都有一个加速度计输出向量[Ux+-Ux-Uy++Uy-Uz+-Uz-]与之对应,因此可通过设置多加速度点试验寻求多组对应的输入输出向量,利用最小二乘法求得零偏、标度因数、交叉耦合及非线性误差矩阵的最优估计。即将式(1)改写为矩阵相乘的形式
Uk=a
(2)
由于测试点数目远大于所要求的18个参数,因此可用最小二乘法求出式(2)的最优解,根据最小二乘法解出式(3)
k=(UTU)-1UTa
(3)
便得到误差模型中的18个系数。至此,MIMU中加速度计组的标定便完成了。
3 试验验证
标定试验中MIMU内部集成的三个加速度计均为北京大学微纳电子研究院研制的单轴MEMS加速度计,量程为50gn。
标定试验流程如下:1)上电,回零,使随动台定位于0°的位置;2)将MIMU固定到随动台台面,使x轴加速度计敏感方向与离心机旋转时提供的离心加速度方向相同;3)完成标定试验所需的电气连接;4)设定离心机输出的加速度为一固定值1gn,待输出的加速度稳定后,采集三轴加速度计的输出读数;5)将离心机输出的加速度设定为2,4,6,8,10,…,50gn,待输出的加速度稳定后,记录三轴加速度计的输出读数;6)控制随动台旋转180°,重复步骤(4)和步骤(5);7)依次以y轴,z轴为敏感轴,重复步骤(1)到步骤(6)。
为验证本文所述方法的有效性,进行两次标定试验。首先在安装六面体夹具过程中,尽可能使加速度计有效质量中心O3与随动台旋转中心O2重合,按照上述标定试验流程完成第一次试验。其次,人为调整夹具位置,有意增大安装误差,按照上述标定试验流程完成第二次试验。

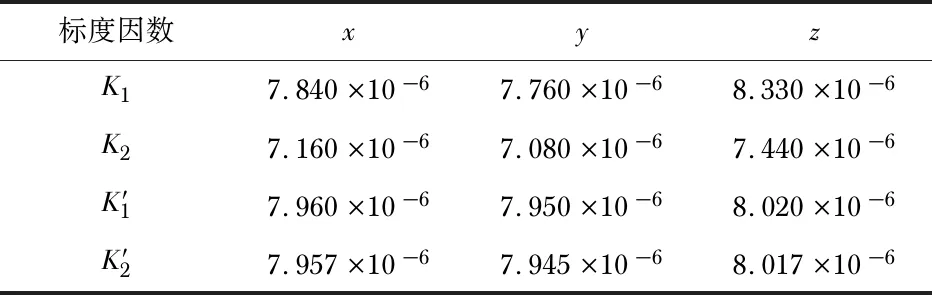
表1 标度因数结果比较
从表1中可得,当不进行加速度计输入误差修正时,x轴加速度计标度因数相对偏差达9.50 %,y轴加速度计标度因数相对偏差达9.61 %,z轴加速度计标度因数相对偏差达11.96 %。当进行加速度计输入误差修正时,x轴加速度计标度因数相对偏差仅仅只有0.038 %,y轴加速度计标度因数相对偏差仅仅只有0.05 %,z轴加速度计标度因数相对偏差仅仅只有0.037 %。由此可见,该方法很大程度上减小了输入误差对加速度计标度因数标定的影响。
以重力场标度因数标定值为参考,将上述得到的加速度计标度因数向量K1和K′1与重力场标定值进行对比,如表2所示。
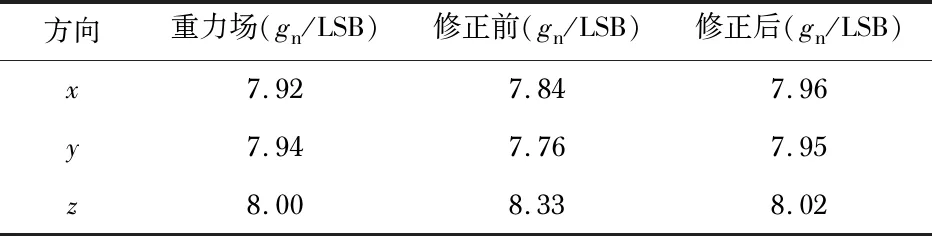
表2 离心机与重力场标度因数标定值对比 10-6
由表2,离心机标定消除输入误差后,利用最小二乘得到的标度因数与重力场标定值非常接近,最大相差0.51 %,而修正前,利用最小二乘得到的标度因数与重力场标定值最大相差4.13 %。可见消除输入误差后,能够得到较高精度的标度因数,标度因数精度提高了3.62 %。
根据第一次标定试验采集到的数据,按照本文所述方法进行加速度输入数据处理,根据式(2)和式(3)计算得到加速度计组误差模型系数,如表3所示。
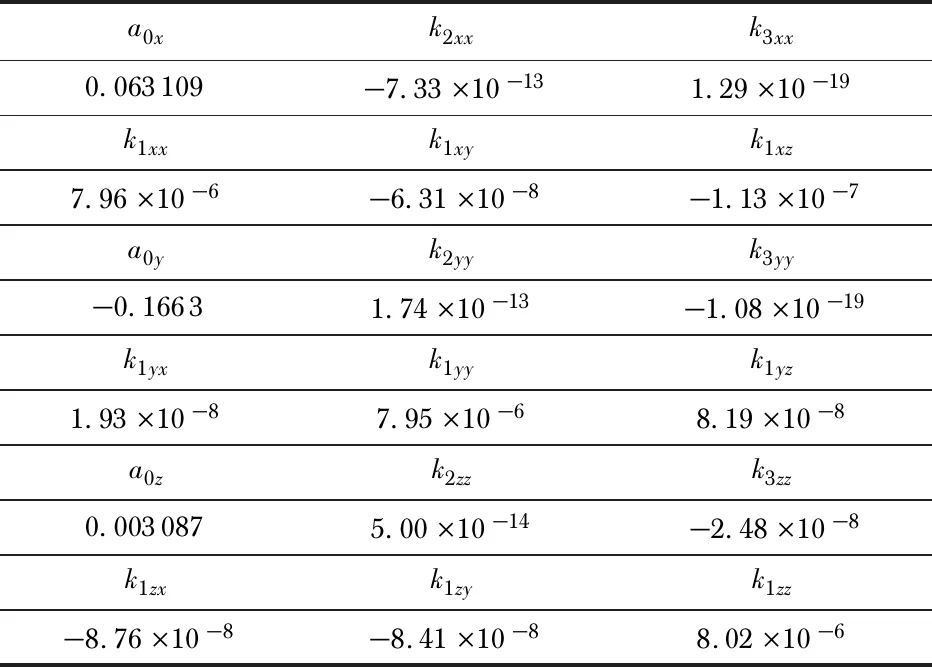
表3 加速度计组误差模型系数
将三轴加速度计输出代入式(1)中进行补偿,依次观察当x,y,z轴加速度计分别受到离心加速度激励时,交叉耦合误差对另外两轴加速度计的影响。补偿前与补偿后的效果对比如图2所示。
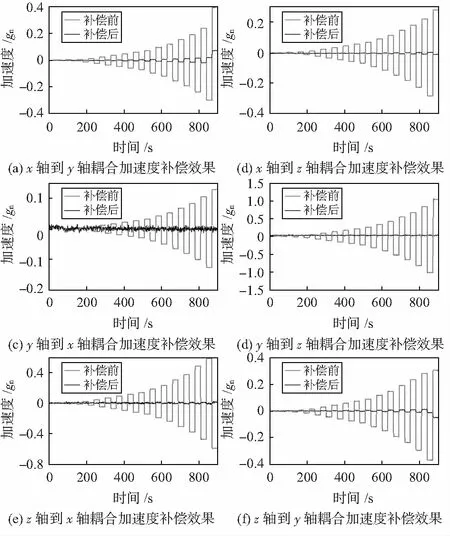
图2 加速度计交叉耦合补偿效果
由图2中可见,补偿后交叉耦合基本得以抑制,加速度计组的交叉耦合从1.4 %降低至0.16 %。补偿前后零偏的效果对比如图3所示。

图3 加速度计零偏补偿效果
x轴加速度计零偏从-4.9 mgn降低至-0.9 mgn;y轴加速度计零偏从-3.8 mgn降低至0.3 mgn,z轴加速度计零偏从-2.8 mgn降低至0.24 mgn。
上述试验结果表明,该方法标定补偿效果显著。
4 结 论
本文从实际应用出发,针对MIMU使用离心机标定时,内部加速度计组集成安装误差及MIMU安装误差,导致标定过程中加速度计实际受到的离心加速度激励与设置不一致,引入加速度计输入误差,影响加速度计标定精度的问题。提出一种消除加速度计输入误差的标定分析方法。该方法基于离心机标定时MIMU中加速度计正反向输入状态下安装误差对称的关系,在误差模型方程中引入安装误差项,通过对两种状态下输入取代数平均,消除安装误差项。利用最小二乘法得到加速度计组误差模型系数,对加速度计组进行补偿。
最后,采用北京大学微纳电子研究院研制的MEMS加速度计对提出的标定补偿方法进行验证,证明该方法有效。消除了加速度计输入误差,提高了标定精度,对加速度计补偿效果显著。
