双绞龙式屋顶冰雪清除装置的设计
2021-10-15龚可祎吴何畏
谢 静,龚可祎,吴何畏
(湖北文理学院机械工程学院,湖北 襄阳 441053)
引言
我国冬季来临时,大部分地区会有3~5个月的降雪期,降雪后若不及时清理积雪,积雪会使屋顶的负重加大,甚至可能导致安全事故。同时,积雪会发生“夜冻昼化”现象,这种现象所产生的破坏应力会使墙体钢筋疲劳强度降低,从而影响房屋的使用寿命。现阶段我国屋顶除冰雪最普遍的方式就是人工除冰雪,即单纯人工作业或人工借助小型的除冰雪工具进行清除冰雪,这些方式效率低下,且存在一定的危险性,同时也无法及时清除积雪[1-2]。在机械除冰雪领域,由于国内冰雪清除机械研发起步较晚,目前多用于道路清除冰雪,产品类型和功能单一,只能专用于除冰或除雪,而屋顶冰雪清除机械才刚起步,技术尚不成熟。虽然国外屋顶除冰雪机械种类齐全,但大部分是大型除冰雪机械。采用在工程车辆上安装除冰雪设施,设备结构复杂,造价昂贵,不能被广泛应用[3-4]。本文设计了一款能够实现在暴雪天气下,自动清除屋顶冰雪的装置,该装置具有适用于现有房屋结构,破冰除雪一体化作业,自动化程度较高,冰雪清除效率高等特点。
1 设计方案
双绞龙式屋顶冰雪清除装置总体结构图如图1所示,主要由双绞龙冰雪清除机构、履带式行走机构、背负式机架、仿形刮雪铲、传动行程限位装置和STM32F103RCT6单片机控制系统等组成。
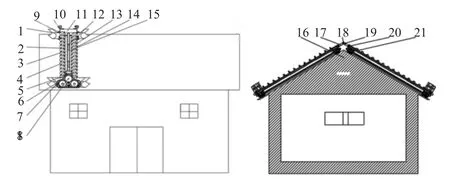
图1 总体结构图
双绞龙式屋顶冰雪清除装置工作原理。背负式机架采用铰链连接,使得冰雪清除装置可改变工作角度,使其可安装于不同的屋顶;绞龙由电机驱动,在皮带和皮带轮的传动下同步旋转。同时绞龙叶片边缘设置有可拆卸的破冰刀;履带式行走机构位于机架的下方,带动冰雪清除装置移动;在运行过程中,双绞龙和刮雪铲组合,可实现破冰除雪一体化作业;当传动行程限位装置接触到屋脊两边挡板后,控制系统控制履带式行走机构反向运动,冰雪清除装置反向工作,实现往返除雪[5-6]。
2 双绞龙冰雪清除机构
绞龙固定在屋顶的两边,采用皮带和皮带轮传动。绞龙的刃口曲线采用阿基米德螺旋曲线,并在叶片上设置了可拆卸的螺旋排列的破冰刀,旋转的螺旋装置兼有清除和推送功能。该滑切入雪的工作方式,工作平稳,可减少功率消耗,降低清除冰雪阻力,减少振动,如下页图2所示。
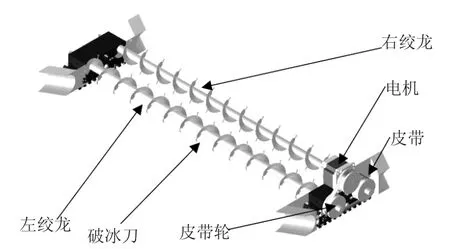
图2 双绞龙式冰雪清除机构图
3 刮雪铲的设计
仿形刮雪铲依靠装置前进的动力将绞龙与屋顶之间积雪铲起,刮雪铲铲体呈仿锤状,与挡雪板之间通过铰链连接,刮雪铲在重力的作用下自然下垂,且预设有扭簧接头,在遇到障碍物时刮雪铲的边缘会自动弹起,增加了装置的适应性。积雪由于受自身重力的影响,具有沿着铲体向下滑移的趋势。同时铲体的设计应尽可能使积雪远离房屋堆置。
铲面形状为渐开线型,渐开线的参数方程为:
式中:r为基圆半径,mm;α∈[0,2π]。
经计算,当刮雪铲的上曲面的切线方向与竖直方向的夹角呈75°时,可有效控制清除冰雪过程冰雪颗粒飞溅的范围。如图3所示。
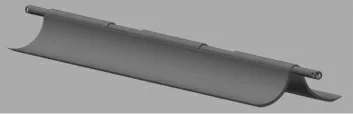
图3 刮雪铲设计结构图
4 履带式行进机构的设计
该机构通过电机驱动,在屋顶表面行进。采用该机构不需要对屋顶进行大幅度的改造,即可完成对冰雪清除装置的支撑;且可有效降低对屋面造成损害[7]。当行程限位装置接触到屋脊两边挡板后,自动换向,实现往返除雪。如图4所示。
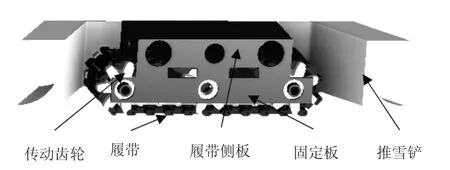
图4 履带式行走机构
5 控制系统
该设计是基于单片机的控制系统,整个系统由STM32F103RCT6单片机系统、双绞龙式屋顶冰雪清除装置机械装置、积雪厚度感应系统、显示屏等组成。在雨雪天时,系统通电,当积雪厚度达到预定值时,积雪感应系统检测到信号,传递给单片机,装置启动,刮雪铲将雪铲起,绞龙将雪从屋顶送下;冰雪清除装置沿屋面移动,当传动行程限位装置接触到屋脊两边挡板后,系统控制电机反转,冰雪清除装置开始反向运动,从而达到往返运动除雪的目的;当积雪厚度降到预定值以下时,装置自动返回,处于待机状态。按下停止运行按钮即可停止装置,见图5。
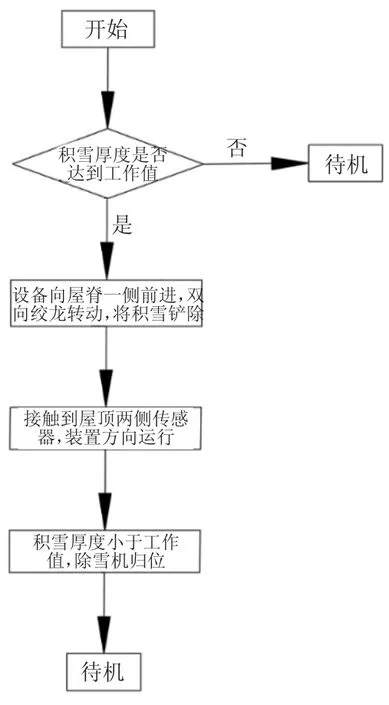
图5 冰雪清除机工作流程图
为了保证除雪安全,装置整体运行平稳可靠,系统软件须设计保护,以保证程序的可靠性,确保软件错误率最小,且当程序出错时,仍能保证系统正常运行和安全退出。本文在控制系统程序可靠性方面主要考虑以下几点:
1)当冰雪清除装置因障碍物阻挡无法移动或电机停止转动时,系统自动切断工作电源,发出警报,并将提示信息发送到用户的显示屏。
2)为了防止各种干扰造成的程序紊乱现象,在程序区的跳转指令和返回指令之后,对于未使用的ROM区域设置软件陷阱,当程序进入软件陷阱后迫使它返回初始状态,让系统尽快恢复运行。
3)确保系统有足够的时间冗余。通电后,系统会先延时一段时间,然后初始化单片机,确保系统最终复位到位。
6 结论
本文设计了主要由双绞龙冰雪清除机构、履带式行走机构、背负式机架、仿形刮雪铲、传动行程限位装置和STM32F103RCT6单片机控制系统等组成的双绞龙式屋顶冰雪清除装置,采用STM32F103RCT6单片机控制系统,实现了对该装置的整体控制。同时运用电子信息控制系统技术,以达到预期效果。
与现有的除冰雪方法相比,该装置能自动清除屋顶表面的冰雪,自动化程度较高,可安装于不同结构的屋顶,且模块化设计使该装置具有便于拆卸与安装、制造和运行成本低、适应性广等特点,适用于受暴雪干扰、屋顶积雪严重的地区,能有效解决城市建筑和住宅屋顶冰雪清除困难、工作条件受限等问题,对促进我国屋顶除冰雪机械的发展具有良好的应用前景。
