基于云计算平台的光通信状态识别系统设计
2021-09-29张宇刘珊
张宇, 刘珊
(国网山西省电力公司电力科学研究院, 山西 太原 030001)
0 引言
相对于其他通信技术,光通信技术的速度更快,环境的适应能力强,而且抗干扰能力更优[1]。随着光通信技术的不断发展和成熟,光通信技术在许多领域得到了广泛的应用,如信息采集、医院、军事等[2-4]。由于光通信在自然环境中,因为其他因素干扰,如非法入侵、信号不稳定、信号干扰等,光通信状态会发生改变,当干扰超过一定的程度,使得光通信状态异常,异常状态会影响光通信系统的数据传输,如数据重传次数增加,数据传输时间变长,以及数据传输成功率下降等,因此需要对光通信状态进行高精度识别,根据光通信状态变化制定相应的措施,提高光通信系统的性能具有十分重要的研究价值[5-7]。
光通信状态识别是一种模式识别的多分类问题,为了保证光通信状态长期处于正常状态,许多学者引入了各种技术对其进行了研究,提出了一些光通信状态识别方法。最初人们通过一些专门设备对光通信状态进行检测和识别,由于是一种人工方法,使得光通信状态识别可靠性差,光通信状态识别过程繁琐,光通信状态识别效率低,而且光通信状态识别结果与光通信状态实际结果有时完全不一样,无法满足现代光通信技术的发展要求[8-10]。随后人们提出基于K近邻方法的光通信状态识别技术,通过提取光通信状态识别特征,采用K近邻方法建立光通信状态识别的分类器,识别效果要优于人工方法,但是该方法假设光通信状态和特征之间是一种固定的线性变化关系,这与实际情况不相符,使得光通信状态识别误差较大[11]。最近由于人工神经网络技术的发展,出现了基于各种人工神经网络的光通信状态识别方法,如BP神经网络、RBF神经网络等,光通信状态识别结果要好于K近邻方法,但是由于人工神经网络要求光通信状态信号数据比较大,如果不满足该条件,那么光通信状态识别效果差,而且人工神经网络的学习时间长,影响光通信状态识别效率[12-13]。
为了解决当前光通信状态识别存在的问题,有效降低光通信状态识别误差,设计了基于云计算平台的光通信状态识别方法。采集光通信状态信号,从信号中提取识别特征,然后通过云计算平台将多个节点合在一起,每一个节点采用支持向量机拟合特征和光通信状态类别之间的变化关系,实现光通信状态识别。测试结果表明,本文方法是一种速度快、正确率高的光通信状态识别方法,验证了基于云计算平台的光通信状态识别方法的优越性。
1 基于云计算平台的光通信状态识别方法
1.1 云计算平台的工作原理及提取特征
随着每天数据不断上升,有的领域的数据呈指数速度上升,进入了大数据时代。传统数据处理技术采用单机方法,单机的中央处理器(CPU)由于制作工艺以及电子器件尺寸的影响,单机处理速度已经达到了瓶颈,无法大幅度进行提升,这样难以满足大数据处理的要求。在大数据背景下,出现了云计算平台,云计算平台将多个分散在不同地理位置的节点组合在一起,采用分布式管理技术,得到一个性能优异的大系统,加快数据处理能力。当前云计算平台主要采用MapReduce进行工作,将一个大任务划分成不同的片段,采用不同节点同时对不同片段进行处理,减少了大任务的处理时间[14-15],其工作原理如图1所示。
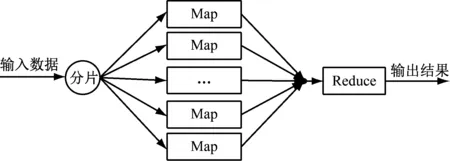
图1 云计算平台的工作原理
本文引入云计算平台,使多个点同时进行光通信状态识别,加快光通信状态识别速度。
提取光通信状态信号识别的特征步骤如下。
Step1: 采用专门工具采集光通信状态信号。
Step2:采用小波变换对光通信状态信号进行多尺度分解,得到不同幅度的光通信状态信号,然后提取第k个幅度的光通信状态信号的能量值Ek,如式(1)。
(1)
式中,L为分解尺度数;xkm为信号的幅值。
Step3:对能量特征进行归一化,建立光通信状态信号扰动信号特征向量t,具体为式(2)。
(2)
1.2 光通信状态识别的分类器设计及工作步骤
支持向量机和最小二乘支持向量机均属于数据挖掘技术中的机器学习算法,最小二乘支持向量机的学习速度快,但是其学习精度很低,难以建立高精度的光通信状态识别分类器,因此本文选择支持向量机进行光通信状态识别研究。支持向量机的形式可以描述为式(3)。
yk=ωTφ(xk)+b
(3)
式中,xk表示第k个光通信状态特征;φ(·)表示拟合函数;b表示偏置向量。
根据支持向量机的学习过程对式(3)进行相应的变换,得到它的等价形式,即式(4)。
(4)
式中,e表示支持向量机的误差。
为了进一步简化学习过程,采用拉格朗日乘子αk构建相应的拉格朗日函数,具体为式(5)。
(5)
根据结构风险最小化,根据式(6)—式(9)得到偏置向量b的值。
(6)
(7)
(8)
(9)
由于光通信状态与特征之间具有一定的非线性,因此引入核函数得到支持向量机的光通信状态识别结果为式(10)。
(10)
支持向量机引入拉格朗日函数,提高了支持向量机学习效率,为构建光通信状态识别分类器提供支撑。云计算平台的光通信状态识别步骤如下。
Step1:采集光通信状态识别信号,去掉其中的噪声。
Step2:对去噪后的光通信状态信号进行多尺度分解,提取光通信状态信号特征。
Step3:将光通信状态信号特征作为支持向量机的输入,光通信状态类型作为输出,通过支持向量机学习,建立光通信状态信号分类器。
2 光通信状态识别的具体实例分析
2.1 云计算平台的设计
要进行测试实验,需要搭建云计算平台,本文搭建云计算平台包括多个节点,一个为中心节点,其他为工作节点,中心节点的任务是管理这些工作节点,使这些工作节点能够协调工作,不冲突,保证每一个节点的任务均衡,使节点资源得到充分利用,具体描述如表1所示。

表1 云计算平台节点的相关参数
2.2 光通信状态信号的来源
为了测试云计算平台的光通信状态识别有效性和优越性,选择最常用的光通信状态识别方法:BP神经网络和K近邻方法在相同的平台进行对比测试,分别统计光通信状态识别的正确率,拒识率和误识率。采集大量的光通信状态信号作为测试目标,光通信状态信号可以划分为多类,正常光通信状态为一大类,异常的光通信状态为一大类,异常光通信状态信号划细化为4类,具体为:非法入侵状态,信号中断状态,干扰状态,非法攻击状态。其中正常状态编号为1,4种异常状态编号为:2—5。不同光通信状态信号的样本数量如表2所示。
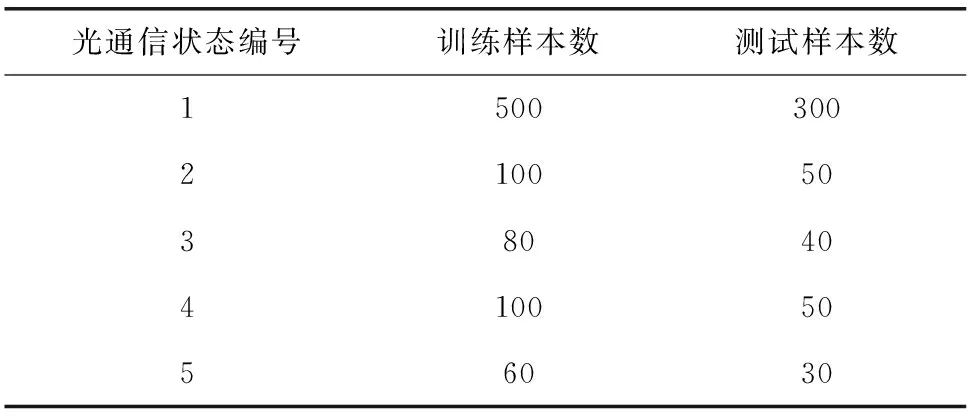
表2 不同光通信状态信号的样本数量分布
2.3 光通信状态识别效果对比
3种方法的光通信状态效果,如图2所示。
对图2的实验结果进行分析,可知。

图2 不同方法的光通信状态识别效果比较
(1)K近邻算法的实验结果最差,无法准确区别各种光通信状态,光通信状态识别结果与实际值偏差大,无法描述光通信状态之间的区别,局限性十分明显,不能应用于实际的光通信状态管理中。
(2) BP神经网络的光通信状态识别效果要优于K近邻方法,提高了识别正确率,光通信状态的识别误差明显减少,但是光通信状态识别结果与实际应用要求有一定的差距。
(3) 在所有方法中,云计算平台的光通信状态识别效果最佳,较好地克服了当前光通信状态识别方法存在误差大的难题,可以高精度识别各种光通信状态,光通信状态识别正确率高。
2.4 识别效率对比
为了测试云计算平台和传统单机平台的光通信状态识别效率,分别计算两种平台的光通信状态识别时间(ms),其中云计算平台的节点数为10,结果如图3所示。
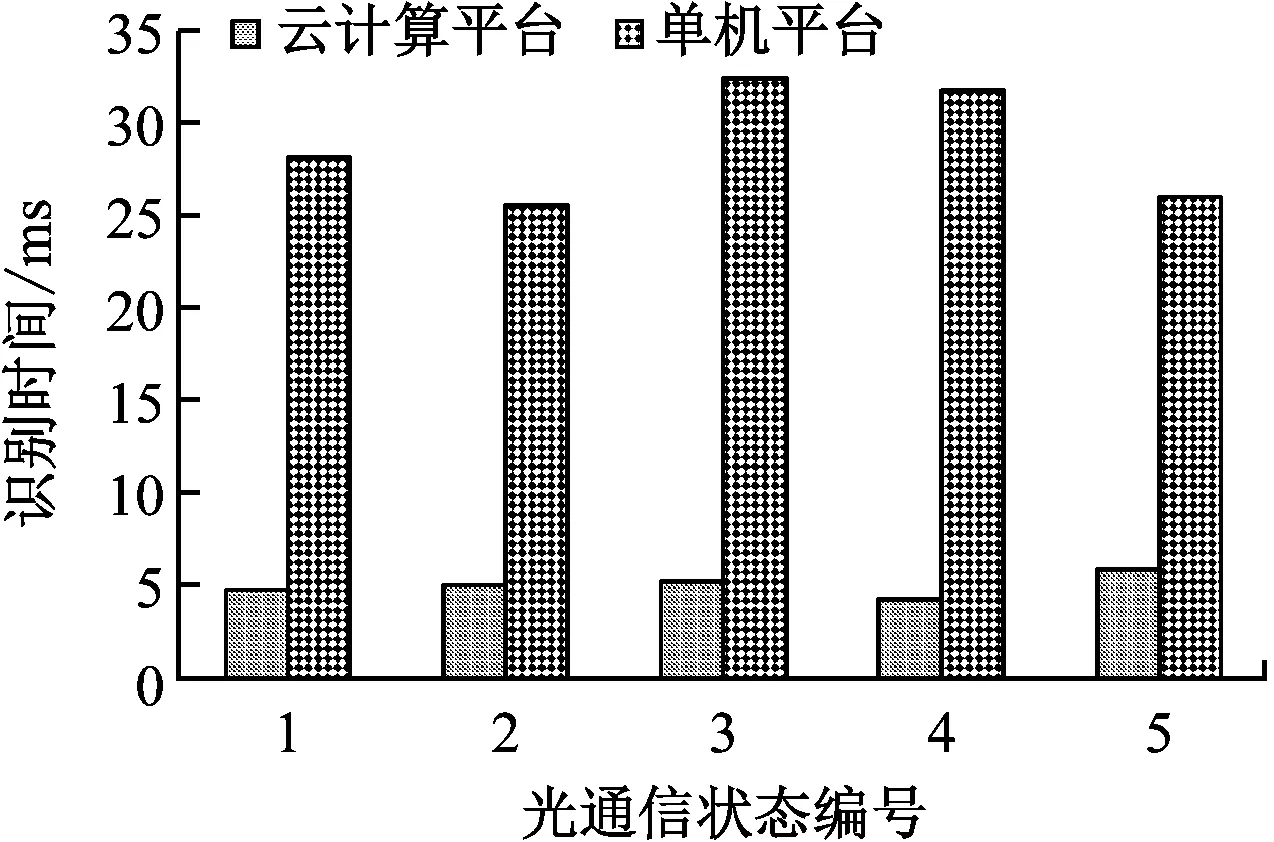
图3 云计算平台与传统平台的识别时间对比
对光通信状态识别时间进行对比分析可以知道,云平台的光通信状态识别时间的平均值为5.10 ms,单机平台的光通信状态识别时间的平均值为28.20 ms,云计算平台大幅度缩短了的光通信状态识别时间,提高了光通信状态识别效率,可以满足大规模光通信状态信号的建模与识别研究,实际应用价值得到了有效的提升。
3 总结
光通信状态识别是当前研究的热点,传统方法存在光通信状态识别误差大,速度慢等难题,为了提升光通信状态识别效果,设计了基于云计算平台的光通信状态识别方法。测试结果表明,相比较于单机平台,云计算平台可以有效缩短光通信状态识别时间,加快光通信状态识别速度,能够高精度识别各种光通信状态,光通信状态识别的拒识率和误识率低于对比方法,具有十分广泛的应用前景。
