基于改进ROV技术的水工建筑物水下检测应用
2021-09-24张震
张 震
(上海勘测设计研究院有限公司,上海200434)
现如今,水闸、泵站和船闸等水利建筑结构经过长年运转后,会出现例如裂缝、凹坑、侵蚀等严重损坏,由于这些损坏发生在水工建筑物的水下部分,并且处于技术管理工作检查的盲点,因此水利建筑损坏的发生难以及时发现,检测也相当麻烦[1-2]。水下检测技术的发展长期以来进展缓慢,目前安排潜水员进入水下探索依然是普遍使用的常规方法[3]。然而,很多河流水质相对浑浊,潜水员无法清楚地勘察水下情况。同时,手工检测技术对潜水操作技能,潜水员的水下操作经验要求较高,因此测试结果不够客观[4]。
针对上述问题,文献[5]采用自浮式沉箱技术,通过智能检测设备进行水下探索,但是该方法维护范围小,易受水深和净高的影响;文献[6]公开了水下机器人ROV 技术,但由于大多数水力结构所处的河流和湖泊具有一定程度的浑浊,难以检测出清晰的图像。
针对上述存在的问题,本研究提出了一种改进的ROV 检测水工建筑物水下情况,其创新性在于:①使用微控制器Arduino UNO 与集成采样器组成的检测系统,通过检测水下pH 值参数、浊度(NTU)参数和总溶解固体(TDS)参数,从而分析水工建筑物侵蚀原因。②采用声纳成像技术改进水下机器人成像系统,通过声学原理成像在浑浊的水体中可获得较好的图像效果,声纳声透镜体积小,易于在小型水力结构和狭窄水域中操作。
1 水下机器人系统设计
水下机器人从中央系统进行电气控制,可由技术员远程操纵电动推进器进行机动,并利用物联网技术构建水下机器人检测系统来进行水下pH 值、水浊度和总溶解固体的检测,ROV 机器人控制系统框硬件框图如图1所示。
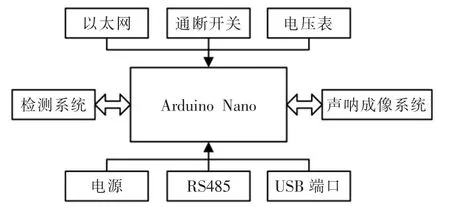
图1 ROV 机器人控制系统硬件框图Fig.1 ROV control system hardware block diagram
机器人中心控制系统使用的是Arduino Nano微控制器,通过远程计算机控制用作系统输入,然后电动机提供系统动力。外包命令箱包括电源、以太网交换机、电压表和通断开关,电源可通过内部电位计调节[7-8]。标准数据通信通过Gbit 以太网或可选的100 Mbit(降低的分辨率/帧速率)进行,长度为70 m的混合GigE RS485[9]脐带缆通过可湿配的MCBH-16 连接器从摄像机单元连接到上侧单元,或者通过带有连接器的1.2 m 尾纤连接到ROV[10]。
2 关键技术
在本节中,将分别阐述ROV 水下机器人控制系统中检测系统与声呐成像系统的具体设计。
2.1 检测系统设计
水质监测对于了解水工建筑物的侵蚀原因至关重要,为此,本研究中通过检测水下pH 值参数、浊度(NTU)参数和总溶解固体(TDS)参数,从而分析水工建筑物侵蚀原因。本研究中的检测系统使用Arduino UNO 计算系统与采样器组成。其中采样器种类有测量水下pH 值、TDS 与浊度。通过ROV 水下机器人采样器进行检测,经过无线传输将测量的参数数值显示在云平台上[11]。监控系统结构如图2所示。
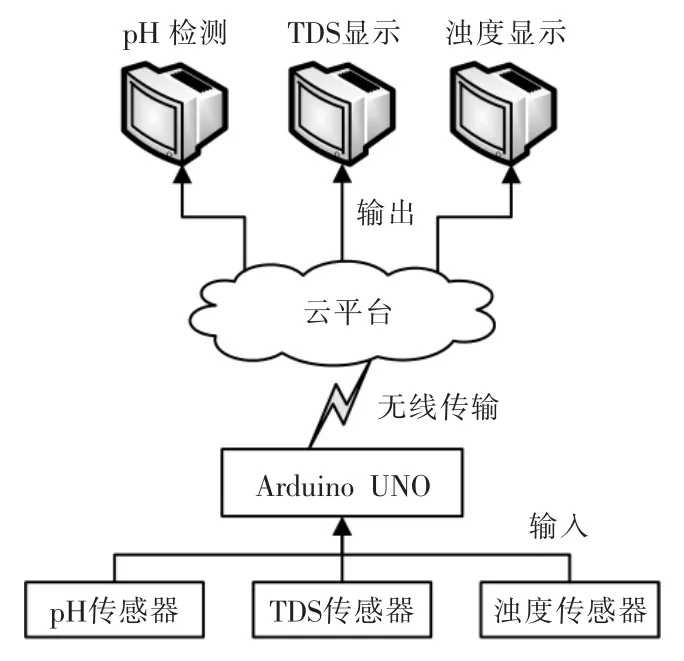
图2 检测系统结构框图Fig.2 Detection system structure diagram
根据图2分别说明3 种采样器的采集计算过程。首先,pH 采样器用于改变非电强度,即酸度(pH)是电压的电强度。通过将pH 计工具的测量结果与所用的pH 采样器进行比较,即可以完成检测[12]。但是,在开始检测之前,需要先校准pH 采样器,可以使用线性方程校准pH 采样器[13]。等式为

式中:Y 表示pH 计测量值;M 表示采样器校准系数;x 表示采样器电压的测量值;C 是采样器常数。
校准是在两种类型的液体中进行的,即酸性液体和碱性液体。所用的酸性液体是水醋,而所用的碱性液体是肥皂水。初始测量时:

式中:Y1与Y2分别表示酸性液体和碱性液体的pH计测量值;x1与x2分别表示酸性液体和碱性液体的采样器电压的测量值。
将这些初始值插入式(1)中以查找梯度(M)值,计算出pH 采样器校准方程式值为
人员信息管理主要是实现学生、员工、班主任、辅导员信息的添加、删除、修改和查询以及相应人员的考勤,在设计时充分考虑到用户体验,实现成批添加、导出文档等功能[4],这些权限由管理员到员工、学生逐级递减。

随后,将校准方程式插入Arduino UNO 上的计算程序中,这样就能检测出水下pH 值的大小。
TDS 采样器是用于测量水中总溶解土壤的采样器,由于TDS 采样器检测计算方式与pH 采样器同理,将不再做多论述。
浊度计采样器是通过读取由于光线的散射而引起的水的光学特性来检测水浊度计的工具之一,并且可以表示为到达光中反射光的比较[14]。根据所查文献以及历史理论获得的研究结果,电压值越小,NTU 值就越大,这意味着水越清澈,张力就越高;相反,水越混浊,张力值就越小[15]。基于获得的理论设计检测算法,TDS 采样器校准原理定义式为

式中:y 表示NTU 值;x 表示采样器电压值;a,b,c 均表示采样器参数。计算NTU 校准方程式采用的是3种不同浑浊程度类型的液体,其初始值为
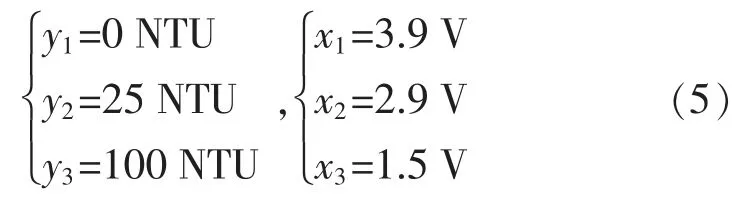
通过式(4)和式(5)计算以获得参数a,b 和c 的值。在代入浊度计采样器的校准方程y 的计算结果之后获得:

随后,将校准方程式插入Arduino UNO 上的计算程序中,经过无线传输测量的参数数值显示在云平台上。
2.2 声纳成像系统设计
鉴于传统方法对水工建筑物水下可见损坏检测的局限性,本研究采用基于声纳成像技术的声呐成像系统用于其检测,该系统经济实惠且能够清晰展现水下图像[16]。关于声呐技术的原理如图3所示。
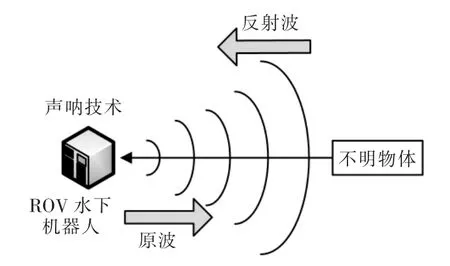
图3 声呐技术原理图Fig.3 Sonar technology schematic
声纳成像是使用声学透镜压缩和会聚声波以形成窄波束,从而获得高清图像数据,当声纳成像工作时,发射系统将带有一定声音信息的发射信号发射到水介质中,如果该信号在水中传播时遇到障碍物,则会生成回波信号[17-18]。
由于传统水下机器人体积大,操作行动缓慢,对于锁定通道狭窄的空间和潜水探索的困难实施,为此,本次设计的声纳成像声透镜探测具有体积小,操作灵活的优点,有利于检测水工建筑物的损坏情况,非常适用可靠。声纳成像声透镜通过调整不同角度,可以调整其声纳成像的大小[19],其原理如图4所示。
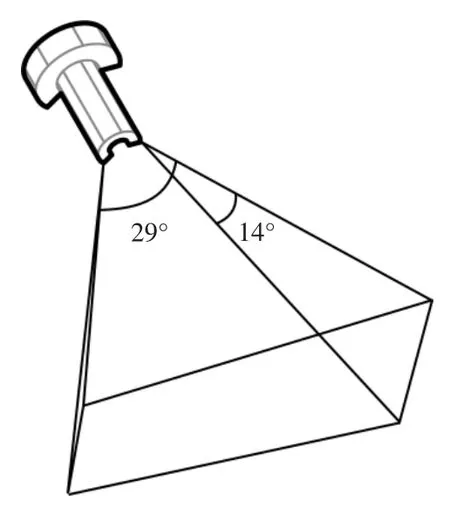
图4 声纳声透镜成像范围原理图Fig.4 Sound scope of sound lens imaging
3 实验与分析
3.1 仪器安装与姿态控制
检测系统所需的组件是Arduino UNO 微控制器,pH 采样器模块,TDS 采样器模块,浊度采样器模块和WiFi 模块。采样器放置在机器人的正面,以方便用户了解机器人的正面。该检测系统是通过利用物联网技术来实现的,以便能够在云服务器中显示采样器值。声纳成像探头安装在机器人侧面,并带有固定支架,以利于在安装和检测过程中对声纳的姿态进行控制。
组装完声呐成像系统后,将组装后续的机器人主控制系统。机器人系统所需的组件是Arduino Nano 微控制器,2.4 GHz 远程控制模块,L298N 电动机驱动器,直流电动机和螺旋桨。最后,将这检测系统与声呐成像系统两个系统电路与主控制系统电路合并为最终的系统实现。
3.2 水下参数检测测试
在获得用于校准采样器值的方程式之后,在某些液体上对采样器进行水下参数检测测试。用作测试材料的流体是矿泉水、清洁剂、醋、肥皂水和咖啡,分别测试pH,TDS 以及浊度数的参数数值,所有这些参数都是使用pH 采样器、TDS 采样器和浊度采样器测量的。关于不同参数相应的清澈水国际质量标准如表1所示。

表1 国际质量标准Tab.1 International quality standard
通过将参考量规的值与所使用的采样器进行比较来完成对采样器的测试,使用这种不同类型的液体进行测试的目的是确定基准测量仪器的采样器值是否使用相同。比较带有pH 计的采样器的pH值的测试结果如表2所示。
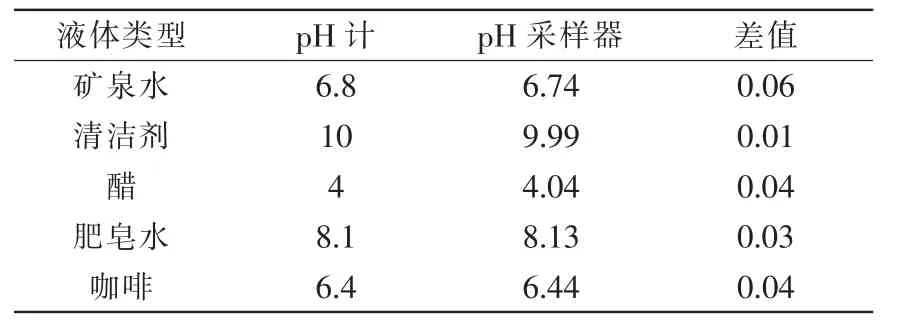
表2 pH 采样器与pH 计的比较(无量纲)Tab.2 Comparison of pH sampling and pH meter(dimensionless)
从表2测试结果来看,pH 计的采样器值差异性较小。使用与pH 测试相同的水样进行TDS 采样器测试。该TDS 采样器可测量溶液中的溶解固体(mg/L)值,测试值将与基准测量仪(即TDS 仪表)的测试结果进行比较。来自TDS 采样器和TDS 仪表的测试结果比较如表3所示。
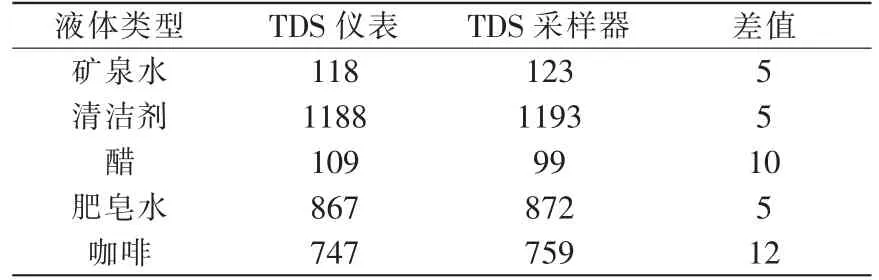
表3 TDS 采样器和TDS 仪表的比较Tab.3 Comparison of TDS sampler and TDS meter(mg/L)
从表3已经完成的测试结果来看,具有TDS 仪表值的TDS 采样器的结果差异较小。浊度采样器测试结果如表4所示。

表4 不同液体上的浊度采样器测试结果Tab.4 Turbidity sampler test results on different liquids
从表4可以看出,在研究中获得的电压值越小,NTU 值就越大,这意味着水越清澈,张力就越高;相反,水越混浊,张力值越小。
3.3 声呐成像测试
为了验证双频声纳技术在水工建筑物检测中的效果,在长江的某控制闸进行了应用测试。其中图5为长江潮位为4.70 m,舱室水深约为5.1 m,声纳探头的水下工作深度为3.0 m,探测目标距离控制在5 m 以内,行距为2 m 时情况;图6为闸室和下游溢流段的水深约为3.0 m,声纳探头的工作深度为1.0 m,检测目标距离控制在5 m 以内,声纳成像的检测图像。
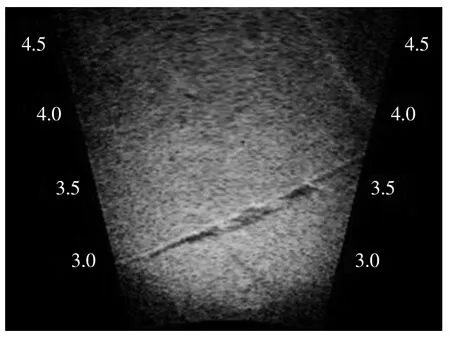
图5 某控制闸的水下检测图像截图Fig.5 Underwater detection image screenshot of a control gate
从图5和图6可以清楚地看到水工建筑物的水下结构的损坏和淤积,这为水工建筑物的水下检测提供了直观且可记录的图像数据。检测完成后,根据声纳检测中记录的实时标记的GPS 坐标,以及检测过程中的水深,声纳工作深度和扫描角度,得到扫描目标图像的位置信息,通过转换获得,从而实现水下目标的定位。从上图能够表明,对于狭窄通道的空间里和潜水探索的困难地方,声纳成像声透镜探测体积小,操作灵活的优点,有利于检测水工建筑物的损坏情况,非常适用可靠。
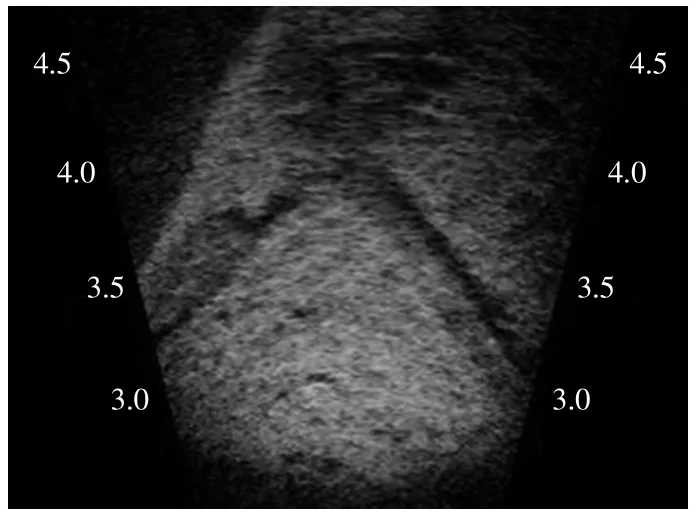
图6 某控制闸的水下检测图像截图Fig.6 Underwater detection image screenshot of a control gate
4 结语
在本项研究中,通过改进水下机器人系统来执行水工建筑物的水下检测,检测系统使用pH 采样器、浊度采样器和溶解性总固体采样器精准地检测出不同参数,并将数值结果通过无线传输至云端。通过双频声纳技术可以在高频和识别模式下工作以获得分辨率,并且可以在浑浊和昏暗的水中获得高清晰的图像。根据测试结果表明,改进的水下机器人检测方式实用可靠。
