基于粒子群和LSTM模型的变区间短时停车需求预测方法*
2021-09-17刘东辉
刘东辉 肖 雪 张 珏
(1.吉林警察学院信息工程系 长春130000;2.吉林大交通学院 长春130021;3.杭州市公安局交通警察支队 杭州310000)
0 引 言
随着机动车保有量飞速增长,停车资源供需关系严重失衡。面对现有停车资源难以满足停车需求,以及现有停车资源难以得到有效利用等停车困境,智能停车诱导系统能够针对每个出行者的停车需求精准高效地提供停车辅助决策和路径诱导,因此有效减少了因寻找停车位而行驶在道路上的车辆,被广泛认为能够缓解停车难问题[1-2]。其中停车信息是该系统得以成功实施的关键与基础,也是其他停车系统与模型的重要输入,因此,准确地预测停车需求信息变得十分重要。
停车需求预测分为短时预测和长时预测,长时指的是以年为单位进行的宏观需求预测,多用于制定停车政策与停车规划[3]。短时停车需求预测则着眼于日内停车需求的变化,即当前时刻和未来某时刻的停车需求,文中研究的停车需求预测方法主要应用于智能停车诱导系统,属于短时停车需求预测。
短时停车需求预测方法主要分为2种:①从停车基础过程出发,将停车场内车辆到达和离开过程描述为车辆排队过程;②基于假设的到达和离开规律分析未来时刻停车需求[4-5]。根据实际观测到的数据,车辆到达与离开过程通常被抽象为泊松分布,由此可获得停车状态转移概率,建立基于经典马尔可夫生灭过程的停车状态转移概率矩阵[6]。该方法无法同时估计到达率与离开率参数,无法完整地描述车辆到达与离开过程与停车需求之间的关系。
得益于先进的检测与存储设备,获取长时间、大规模的连续停车数据变得越来越容易,使得统计和机器学习方法能够在停车需求预测方面得以应用,包括简单回归模型[7]、混沌时间序列分析[8]、多变量时空回归[9]、聚类[10]、神经网络[11],其中神经网络强大的数据拟合能力受到了学者们的广泛研究。神经网络在停车需求预测精度很大程度上受神经网络结构的影响,如输入节点的数量,输入层、隐藏节点的数量,学习速率和动量等,这启发了学者们新的研究方向,通过改进神经网络的模型结构来提高预测精度。包括采用智能优化算法优化网络参数[12],利用小波函数对停车数据时间序列分解与重构[13],采用相空间重构技术建立理论预测模型,采用动态反馈神经网络——Elman神经网络训练预测模型[14-15]。虽然该方法理论上能够获得较好的预测精度,但该类方法的预测过程属于不可见的黑盒过程,仍然无法获得准缺的停车规律;此外,在预测的过程中通常将停车数据无差别地输入到预测模型当中,忽视了停车规律的动态变化特性,减弱了模型对于停车规律的挖掘与识别。
基于以上研究的现状与不足,考虑停车场内车辆到达和离开规律动态变化特性,研究了1种可变停车需求预测区间与预测间隔方法;在此基础上,采用LSTM网络为基础框架预测停车需求,并利用改进的粒子群算法进行优化,针对单一建筑类型停车场,对停车场到达车辆与离开车辆进行分析,以预测停车需求。
1 基于停车趋势分时刻预测区间和间隔确定方法
各类停车需求预测模型的预测效果影响因素主要包括:①模型结构;②训练数据。以往研究大多专注于优化模型结构,往往强调数据体量的作用,却忽略了数据质量的影响。在停车需求预测方法中,通常假定以5 min或15 min作为停车需求预测单位时间间隔的划分,但停车系统是动态且复杂多变的,缺乏对停车过程的分析,而人为地认定后续时刻停车需求只受前5 min或15 min的停车需求影响缺乏依据。
因此,考虑到停车状态变化过程对模型预测结果的重要影响,即停车需求的时变性与波动性随车辆到达和离开过程的变化而变化,故提出通过估计停车到达率和离开率来识别数据预测区段与间隔的思路,从而提高预测模型学习质量与预测精度。
1.1 马尔可夫生灭过程
停车状态变化本质上是以停车到达率和离开率为基础的概率转移结果,即从1个状态到另1个状态的随机过程,具备无后效性与随机性,当时间间隔无限小时,停车状态的变化可视为马尔可夫生灭过程,服从马尔可夫的状态变化规律。
马尔可夫生灭过程规定[16],同一时刻停车状态只能向临近状态转移,即停车状态只有3种变化方式:停车数增加1、减少1或不变。假设单位时间内停车到达率为λ,停车离开率为p,停车状态生灭过程转移概率见式(1)~(4)。

其他情况见式(4)。

式中:h为无穷小的时间间隔;ο(h)为时间间隔h的高阶无穷小量。当停车场车辆到达过程符合泊松分布,离开过程符合二项分布时,以马尔可夫过程为基础,通过代数变换,在停车到达率和离开率一定的情况下,可得到停车状态随时间变化。

式中:E0为停车场内初始车辆数;t为时间序列数据。
1.2 预测区间确定方法
通过式(5)可知,停车状态在时间和空间上的波动性本质上是随时间变化的停车到达率与离开率的变化,即到达率与离开率为定值的时段内,停车场具有相似的停车规律。依据停车到达率与离开率划分预测区段具体流程见图1。
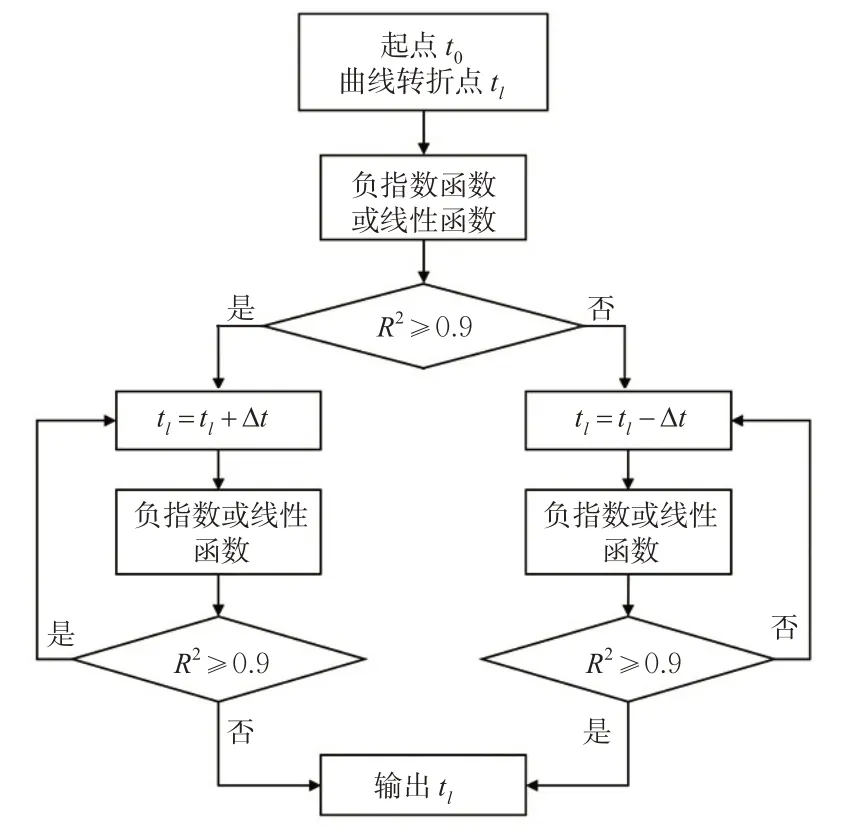
图1 停车预测时段迭代流程图Fig.1 Iteration flow for the parking forecast period
有N天的历史数据,可得到N天停车数据均值,假设一定时间段内停车达到率λ、离开率P是恒定的,通过式(5),拟合历史停车数均值随时间变化的函数,迭代求解不同停车达到率λ、离开率P组合的时段。
停车趋势的变化一般发生在停车数随时间变化曲线的拐点,该点左右导数符号相反。设第l点为曲线的第1个转折点,该点时刻为tl,初始时刻为t0,Δt为迭代单位长度,在时间段内拟合曲线,若拟合优度判定系数R2≥0.9,则更新tl=tl+Δt,直到R2<0.9,输出时间段[t0,tl];若R2<0.9,更 新tl=tl-Δt,直到满足R2≥0.9,输出时间段[t0,tl]。下1次迭代则将上1次迭代最后1个时刻作为初始时刻,找出下1个曲线转折点作为初始曲线拟合时刻,重复上述步骤,直到找出所有的停车达到率、离开率组合,每1个参数组合代表1个预测时段。
1.3 预测间隔确定方法
在不同停车到达率和离开率时段内,单位时间内到达和离开的车辆数也不同,故预测间隔也随之变化。以单位时间内感知到1辆车的变化为原则,建立预测间隔与到达率与离开率之间的关系,见式(6)。

式中:Δt为初始时计算到达率和离开率的时间间隔。
2 预测模型
文章采用改进的LSTM神经网络来预测停车需求,通过调整模型结构和参数来提高停车需求的预测精度。
2.1 LSTM神经网络
LSTM通过遗忘门、输入们和输出门3种门控逻辑架构可学习网络训练过程当中任意时刻的信息,有效提高了网络的学习能力和表征能力[17],网络拓扑结构见图2。

图2 LSTM网络隐含层拓扑结构Fig.2 Hidden layer topology of the LSTM network
遗忘门决定从单元状态中保留的信息;输入门决定单元状态更新的信息;输出门在单元状态的基础上决定输出的信息,各门分别是单独的BP网络,更新规则见式(7)~(9)。

为提高模型的学习效率,避免模型权重较小时模型学习效率低的问题,采用交叉熵代价函数作为输出神经元的代价函数[18]。权重更小意味着网络的预测结果不会随输入的改变而产生强烈的变化,故为避免模型在训练过程中出现的过拟合问题,同时提高预测模型的泛化与预测能力,考虑在代价函数中加入1个权重衰减项,其形式为所有权重平方和平均值项,用以惩罚过大的网络权重,引入规范化参数d,用以调整规范化项在代价函数中的比重,见式(10),式中第1项为交叉熵项,第2项为权重规范化项。

2.2 粒子群算法
粒子群优化算法的基本思想是利用群体中个体对信息的共享,使得整个群体的运动在问题求解空间中产生从无序到有序的求最优解的过程,在函数优化、图像处理、大地测量等众多领域都得到了广泛的应用[19-20]。
本文利用粒子群算法函数优化的功能,采用粒子群算法优化LSTM网络训练初始参数。该过程中,每个粒子均为网络预测输出的1个基本可行解,粒子的位置即为长短期记忆神经网络的连接权值和阈值组成的向量。每个粒子依靠位置和迭代速度决定下1次飞行的位置和速度,迭代标准为LSTM网络代价函数,见式(10)。
粒子群算法更新规则见式(11)~(14)。

2.3 基于粒子群和LSTM模型的变区间短时停车需求预测流程
通过粒子群算法获得网络训练初始参数后,进行长短期记忆神经网络训练与预测过程,具体预测流程见图3。

图3 LSTM网络训练与预测流程图Fig.3 Training and prediction flow of the LSTMnetwork
3 实例分析
吉林大学南岭校区位于长春市南关区,属于教育用地,内部规划停车位共720个,停车需求以教职工车辆为主,社会车辆为辅。笔者选取该校区2019年6月17日—23日为期1周的停车数据作为模型训练集,保证了数据的一般性。选取2019年6月25日(星期二)和6月29日(星期六)作为验证集,对模型预测能力及有效性进行评价。
3.1 预测间隔确定
图4为6月17日—30日期间停车场内的各时刻的停车数。考虑到教育用地的工作特征,18:00—次日06:00间,无明显停车需求变化趋势,且属于夜间停车范畴,故实例验证中不考虑该时段的停车需求变化。与一般用地停车规律相似,该校区停车规律在工作日和非工作存在明显的不同,除星期一初始停车数较少外,工作日与非工作日内均具有相似的波动性和规律性,故可按工作日和非工作分别确定预测间隔和时刻。
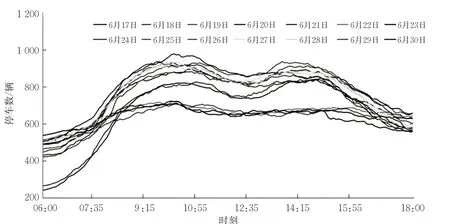
图4 6月17日—6月23日06:00—18:00时刻场内停车数Fig.4 Number of parking spaces inside from 6:00 to 18:00 on June 17-23
按工作日与非工作日,依据1.2中提出的方法确定不同停车趋势时段。根据式(5),通过实际停车数据拟合得到停车到达率和离开率。依据式(6),计算不同时段停车需求预测间隔。为简化计算,提高预测效率,预测间隔计算结果取去掉小数,最大预测间隔设为5 min,最小预测间隔设为1 min。非工作日停车到达率、离开率、预测时段与时间间隔计算结果见表1,工作日停车到达率、离开率、预测时段与时间间隔计算结果见表2。
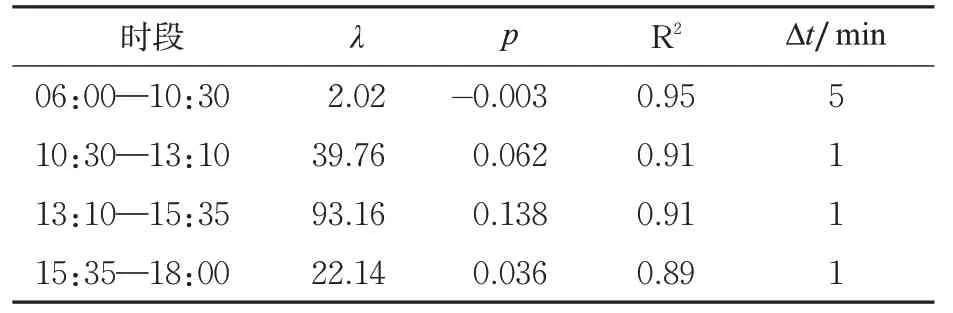
表1 非工作日预测时间间隔Tab.1 Interval of forecast on non-working days
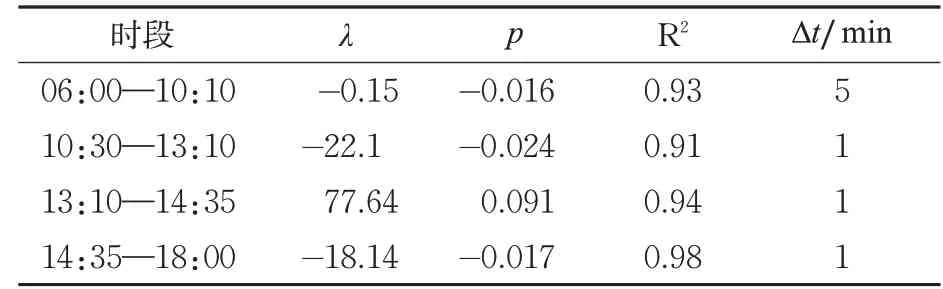
表2 工作日预测时间间隔Tab.2 Interval of forecast on working days
由表1~2可见,工作日与非工作日预测间隔划分大体相似,但停车到达率与离开率均不相同,可能是因为部分教职工除工作日教学工作外,周末仍需来校办公,而其工作时间与工作日具有相似性。同时由图4可见,工作日与非工作日数量波动性上具有较大差异,时间波动性上却具有相似性,无论是工作日还是非工作日,预测间隔除上午为5 min外,其他时间预测间隔均为1 min。
3.2 预测模型参数设置
经多次测试训练,粒子群算法的粒子总数初值取200时较为合适,循环次数取300次,适应值系数设定为10-3,w=2,c=1,vmax=5。
结合粒子群算法的LSTM网络门控制器均设置为3层网络,输入层设置为3,经过多次测试确定隐含层个数为3。学习速率参数确定为0.025,收敛误差与粒子群最优适应度相同。为了在相同的训练次数下比较LSTM网络模型与粒子群LSTM网络模型的预测精度,单独使用LSTM网络模型预测时的迭代学习次数为:种群规模×进化次数×神经网络正向更新时的迭代次数=50×200×10=10 000次。
3.3 预测结果对比分析
根据以上所述的参数设置,计算得到工作日和非工作日粒子群长短期神经网络(PSO-LSTM)、长短期神经网络(LSTM)、前馈神经网络(BP)、小波神经网络(WNN)的平均绝对误差(MAE)和均方误差(MSE),结果见表3和图5~8。
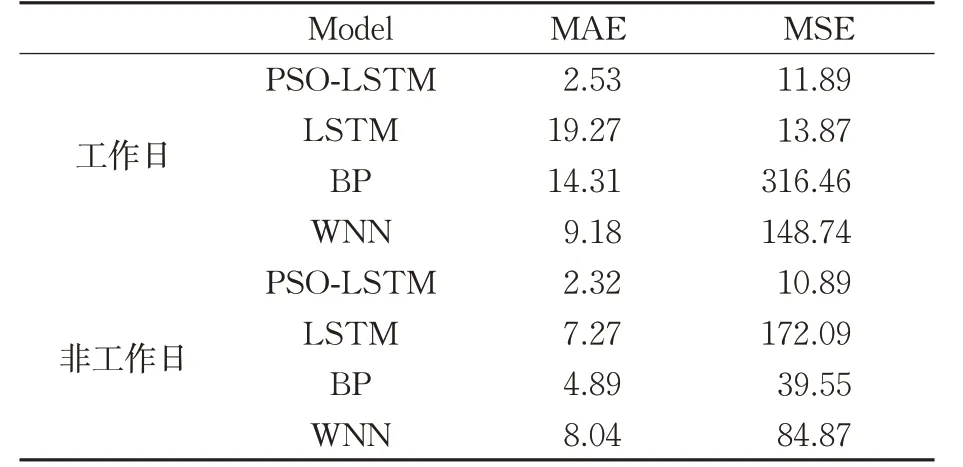
表3 误差对比表Tab.3 Comparison of errors辆
从表3和图5~8中可以看出,PSO-LSTM模型与普通LSTM网络、BP网络,以及小波神经网络相比,具有更高的预测精度,工作日与非工作日平均绝对误差分别为2.53辆和2.32辆,均方误差分别为11.89辆和10.89辆,应用于停车需求短时预测具有较好的预测效果,增加了停车需求预测的可靠性。
4 结束语
基于马尔可夫生灭过程,以停车到达率与离开率为基础,研究了停车需求预测时段与间隔划分方法,建立了基于粒子群和LSTM网络的组合预测模型。以吉林大学南岭校区的停车数据为例,验化网络参数,消除了初始训练参数对模型预测精度的影响,与其他预测模型相比,提出的组合预测模型的预测误差最小,精度最高。模型中部分参数的选取采用了直接赋值的方法,将来可考虑采用其他方法确定参数值。此外,随着智能停车检测设备的普及与停车大数据的开源应用,将进一步获取其他用地类型的停车数据以验证所提出模型的有效性和普适性。

图5工作日PSO-LSTM模型、LSTM模型、BP模型、小波模型预测值Fig.5 Absolute error values of PSO-LSTM NN,LSTM NN,BP NN,and WNN on working days

图6工作日PSO-LSTM模型、LSTM模型、BP模型、小波模型绝对误差值Fig.6 The absolute error values of PSO-LSTMNN,LSTM NN,BP NN and WNN on working days

图7非工作日PSO-LSTM模型、LSTM模型、BP模型、小波模型预测值Fig.7 Predicted values of PSO-LSTMNN,LSTM NN,BP NN,and WNN on non-working days
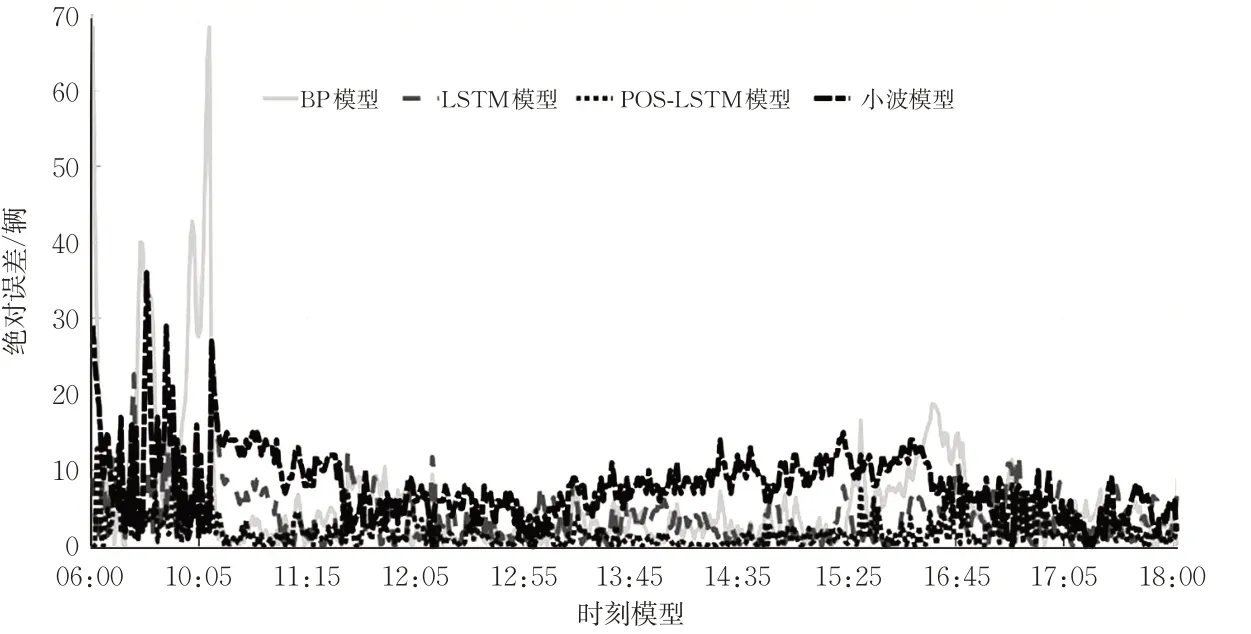
图8非工作日PSO-LSTM模型、LSTM模型、BP模型、小波模型绝对误差值Fig.8 Absolute error values of the PSO-LSTM NN,LSTMNN,BP NN,and WNN on non-working days
