基于LightGBM的驾驶人风险感知能力判别方法*
2021-09-17景云超朱秭硕李海梅
李 青 景云超 朱 彤▲ 朱秭硕 李海梅
(1.长安大学运输工程学院 西安710064;2.长安大学汽车运输安全保障技术交通行业重点实验室 西安710064;3.长安大学汽车学院 西安710064)
0 引 言
风险感知被定义为驾驶员识别道路环境中风险的能力,是1种基于判断和情境意识的个人行为[1-2]。驾驶技能中,只有个人对危险的感知与其事故经历有关[3]。驾驶人的风险感知能力是唯一与碰撞风险有关的高阶认知技能[4-5]。多项研究结果表明对道路风险感知更敏锐的驾驶员发生交通事故的概率较低[6-7]。因此判别驾驶人风险感知能力并采取相应干预措施对预防与减少交通事故有着重要意义。
现有研究多从不同驾驶群体,驾驶人面对危险事件时的驾驶行为、生理指标等角度出发分析驾驶人的风险感知特性,较少有研究分析危险源与风险感知之间的关系。A.Borowsky等[8],G.Underwood等[9],王丰元等[10],文森等[11]分析了驾龄对风险感知特性的影响,结果表明,新手驾驶人对危险事件的感知能力较差,对潜在危险事件的反应更为迟钝,注视危险事件的时间更短。S.W.Park等[12]发现年老驾驶员在控制车速、转向、制动等操作上有着更明显的误操作率。B.Liang等[13]研究了驾驶人的脑电、皮电活动与对道路危险行为的反应时间对风险感知的影响。谷志朋等[14]分析了不同危险源位置下(远前方、近前方、左侧、右侧)驾驶人的风险感知差异性,结果表明,当危险源出现在远前方时识别能力较差,出现在右侧时识别能力最好。在视觉搜索任务中,正确检测到第1个目标会妨碍对同一场景下第2个目标的检测,这被称为后续搜索失败[15]。R.J.Sall等[16]首次考虑危险源因素对驾驶人风险感知能力的影响,通过设计包含0,1,2个低显著性或高显著性危险事件的静态交通场景图,要求被试观看这些图片后报告识别到的目标顺序及个数,以此达到检验驾驶人识别第1个危险后是否有能力识别同一场景下第2个危险的目的。笔者拟设计考虑危险源因素的危险场景模拟试验,研究危险源个数(单/双)及危险源类型(显性/隐性)对驾驶人风险感知能力的影响。
现有研究多基于视频或静态图片以驾驶人对不同风险等级的主观评估或对风险的反应时间作为标准评价其风险感知能力,较少有学者通过分析驾驶过程中驾驶人面对突发危险事件时的应激反应信息进行评价。风险感知作为驾驶人对外界客观环境的个人感受,易受心理状态与环境条件的影响,驾驶人面对突发危险事件时的反应为下意识应激行为,可客观地反映其风险感知能力。交通冲突时间(TTC)常被用来分析碰撞风险,而驾驶人风险感知能力与碰撞风险有关[3-4]。因此TTC可用来衡量驾驶人的风险感知能力。Li等[17]在进行碰撞概率估计时考虑了驾驶人的风险感知特性,将TTC与驾驶人在近碰撞场景下的制动反应作为风险感知评价指标。笔者拟采用驾驶模拟试验,将危险事件嵌入驾驶场景中,以驾驶过程中驾驶人面对危险事件时的TTC衡量其风险感知能力。
驾驶人风险感知能力判别研究对道路交通安全有着重要意义。现有研究多采用让驾驶人观看视频或静态图片的方式,从驾驶人个人特性、生理指标等角度评价其风险感知特性,较少考虑危险源因素的影响。此外,风险感知能力量化指标多为驾驶人对危险的主观评估,带有一定的主观性,较少采用驾驶人在面对危险事件时的应激行为表现。鉴此,本文设计考虑危险源个数及类型的场景模拟试验,采用交通冲突时间(TTC)作为驾驶人风险感知能力量化指标,分析不同风险感知水平下的驾驶人群差异性,并构建综合危险源因素、驾驶人个人特性、驾驶人驾驶行为及眼动特征的评价指标特征集,利用LightGBM算法对驾驶人的风险感知能力进行评估。
1 数据采集
1.1 被试及设备
本次试验共招募35名驾驶人(男性25名,女性10名)。年龄于21~32岁之间(均值为24.86,标准差为2.12),驾龄于1~9年之间(均值为3.63,标准差为1.86)。被试持有合法驾照,双眼视力(或矫正视力)均在1.0以上,无生理疾病,试验前24 h内无饮酒或服用药物。
本试验使用的驾驶模拟器包括三联屏模拟场景显示器、车辆操纵系统(转向盘、加速踏板、制动踏板、离合器踏板、挡杆)、音响系统,见图1(a)。借助UC-win/Road软件搭建试验场景并实时记录车辆的运行数据(速度,加速度等)和操纵数据(离合器,油门,制动器等)。数据采集频率为25 Hz。本试验使用的眼动设备为澳大利亚Seeing Machines公司生产faceLAB5.0眼动仪,可记录驾驶人的注视时间、注视位置、头部位置、头部旋转角度等多项数据。见图1(b)。

图1 试验设备Fig.1 Simulation equipments
1.2 试验场景
以危险源个数(单/双)、危险源类型(显性/隐性)、交通冲突类型(机动车/非机动车/行人)作为设计原则,共设计试验场景12种,其中干扰项3种,防止被试误认场景均有危险而做出不当反应[9],见表1和图2。试验道路为双向6车道城市道路,车道宽3.25 m,限速60 km/h。同向车道无其他车辆干扰,对向车道交通流为自由流模式。危险事件随机出现于驾驶过程中,由被试车辆触发,危险事件之间间隔500~800 m路段。

图2 危险场景示意图Fig.2 Risk scenarios
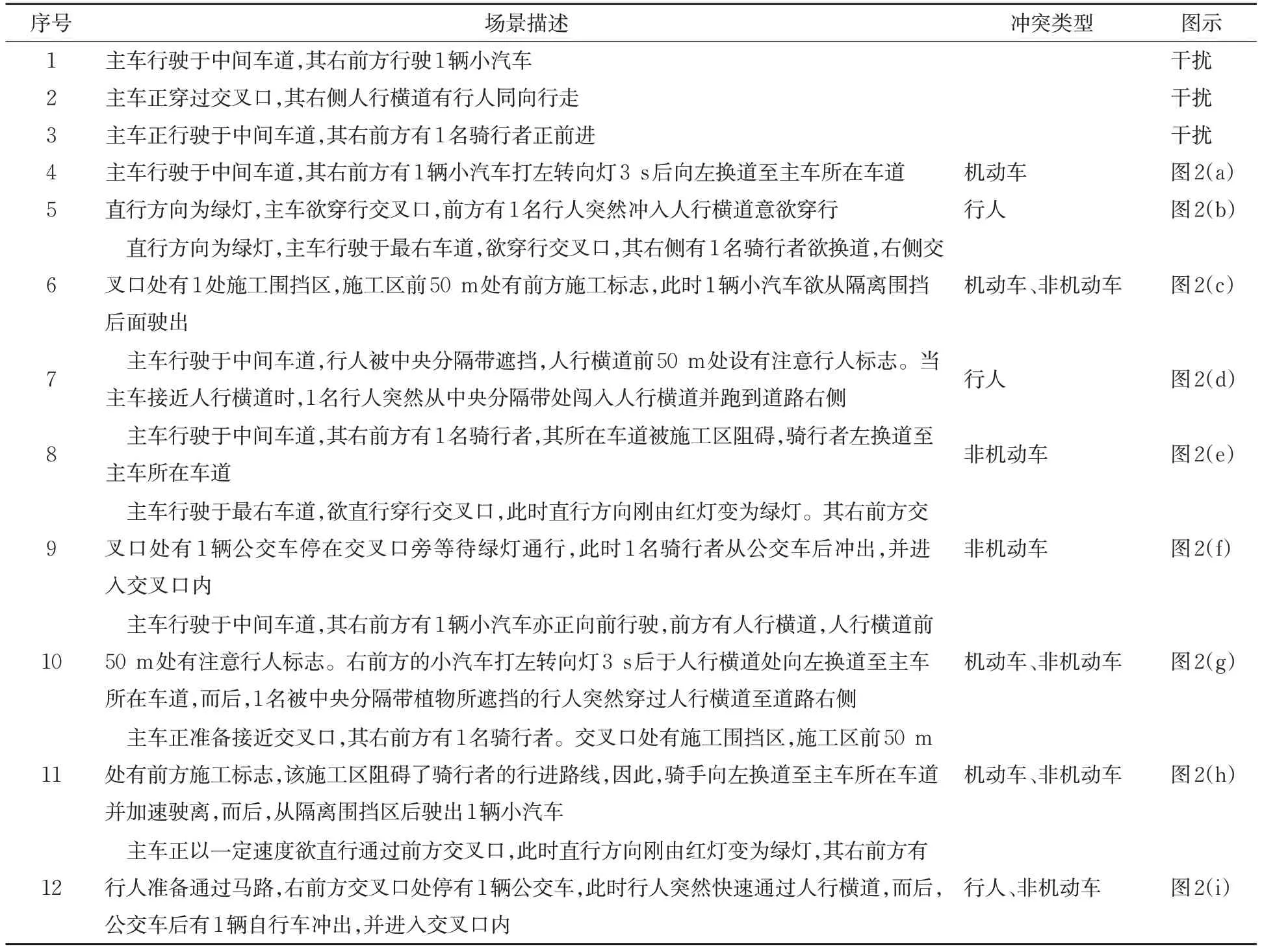
表1 危险场景描述Tab.1 Description of risk scenarios
1.3 采集流程
1)驾驶人基本信息调查。要求被试填写1份调察问卷,以了解其性别、年龄、驾龄、年均驾驶里程等个人信息。
2)试验介绍。试验人员向被试介绍试验内容、流程与基本注意事项。
3)模拟器试驾。正式试验前被试被要求进行约10 min的适应性训练,以熟悉模拟器操作,体验模拟场景。一旦出现眩晕等不适症状,不能参加后续试验。
4)眼动仪校准。对每位被试进行眼动仪校准,校准通过后方可正式试验。
5)正式试验。试验中要求被试严格遵守交通规则,不得随意换道与超车,不得与场景中的交通参与者发生冲突。若发生碰撞,会发出警告信息。碰撞发生后,被试可重新启动车辆,完成剩余驾驶任务。每名被试进行1次试验即可完成全部场景。
6)收集整理数据并备份。
1.4 数据提取
笔者提取危险事件发生点前150 m至危险事件点处的数据用作分析。数据包括驾驶行为数据与驾驶人眼动数据。驾驶行为数据由UC-win/Road自动记录,眼动数据通过逐帧观看录像提取。
提取的特征参数如下。
1)驾驶行为参数。车速、纵向加速度、转向盘旋转率、刹车深度、制动反应时间、制动反应位置。
2)眼动参数。注视次数、首次注视时间、VSS、HSS。
制动反应时间为从危险情景开始到驾驶人做出有效制动反应之间的时间差。制动反应位置为被试做出有效制动反应时的位置与危险事件起点的相对位置。VSS为被试视线绕X轴方向的转动角度标准差。HSS为被试视线绕Y轴方向的转动角度标准差。
除以上特征外,还将危险源个数(单/双)、危险源类型(显性/隐性)、性别、驾龄纳入评价指标特征集。经验驾驶员为驾龄大于2年的驾驶员,其余视为新手驾驶员[18]。
2 驾驶人风险感知能力判别模型
2.1 风险感知能力量化
使用驾驶人在危险场景下的交通冲突时间(TTC)衡量驾驶人风险感知能力。交通冲突开始时刻为驾驶人对危险采取有效制动措施的时刻,据此计算TTC。据已有文献将TTC分为3类,代表驾驶人的风险感知水平[19]。分类标准见表2。

表2 风险感知能力分类标准Tab.2 Standard for classifying risk perception
2.2 基于LightGBM算法的模型构建
LightGBM算法是1种基于决策树的分布式、高性能GBDT框架。相比于XGBoost具有低内存、更快的训练效率、更高的准确率等优点。该算法基于Histogram对特征的分裂进行优化,利用带深度限制的Leaf-wise叶子生长策略替代传统的层生长决策树策略,在保证高效率的同时降低了过拟合的风险[20]。
本文拟基于LightGBM算法构建驾驶人风险感知能力判别模型,具体步骤如下。
步骤1。划分训练集、测试集。将数据的70%作为训练集训练模型参数,30%作为测试集测试模型的泛化能力。
步骤2。利用GridSearch算法确定模型最佳参数,结果见表3。

表3 基于GridSearch算法的模型参数优化Tab.3 Optimization of model parameters based on the GridSearch algorithm
步骤3。利用LightGBM算法进行驾驶人风险感知能力判别。
步骤4。模型性能评价。
3 结果与分析
3.1 不同风险感知水平驾驶人群的差异性分析
为分析不同风险感知水平下的驾驶人群差异性,本文拟对危险源因素、驾驶人个人特性、驾驶行为及眼动特征进行统计学意义上的分析。由于危险源个数、危险源类型、性别、驾龄不满足正态分布,选用Mantel-Haenszel非参数检验法对其进行分析[21],对驾驶人在危险场景下的驾驶行为与眼动特征采用Spearman检验法。
危险源个数(单/双)与驾驶人风险感知能力呈显著负线性相关(见表4,p=0.004,Cor=-0.159)。表5数据显示:①单目标危险源下,“安全”感知能力驾驶人群占比26.1%,“一般”感知能力驾驶人群占比20.4%,“危险”感知能力驾驶人群占比53.5%;双目标危险源下,分别占比30.2%,38.5%,31.3%。②“安全”感知能力驾驶人群中,单目标危险源占比38.9%,双目标危险源占比61.1%;“一般”感知能力驾驶人群中,分别占比28.2%,71.8%;“危险”感知能力驾驶人群中,分别占比55.9%,44.1%。综合以上信息并结合图3(a)可知:单目标危险场景下,不同风险感知水平驾驶人群分布不均衡,“危险”感知能力驾驶人较多,这可能是因为驾驶人在察觉到危险后,对外界环境的风险评价结果低于心理阈值,认为继续执行当前的驾驶状态足以应对危险,无需另外采取避险措施。双目标危险场景下,不同风险感知水平驾驶人群分布较为均衡。驾驶人对双目标危险源的风险感知能力较好,这可以由任务难度稳态理论解释。多个危险源场景的不确定性更大,影响驾驶安全的因素较多,驾驶任务较难,导致驾驶人对驾驶任务的难度难以把握,为了保证行车安全,驾驶人倾向于采取避险操作以降低不确定性,应对危险事件的发生。
危险源类型(显/隐)与驾驶人风险感知能力显著负相关(见表4,p<0.001,Cor=-0.279)。显性危险源下,“安全”感知能力驾驶人群占比15.7%,“一般”感知能力驾驶人群占比31.4%,“危险”感知能力驾驶人群占比52.9%;隐性危险源下,分别占比39.2%、30.4%、30.4%,见表5。这说明驾驶人对隐性危险事件的风险感知能力好于显性危险事件,与SLong的研究结果一致[22](见图3(b))。他们对此的解释是显性危险没有时间压力,驾驶人有足够的时间评估风险,这在一定程度上会降低警觉性。本文进一步延伸认为驾驶人已感知到显性危险事件的存在,行车过程中的未知性与不确定性已大大降低,无须另外采取避险操作应对未知。但在隐性危险源场景下,驾驶人对周围环境信息的认知具有不确定性,迫于时间压力与结果致命性只能通过提前采取避险措施应对可能发生的危险事件。
驾龄与驾驶人风险感知能力存在正线性关系(见表4,p=0.003,Cor=0.164)。由表5可得以下结论。

表5 危险源个数、危险源类型、驾龄与风险感知能力交叉表Tab.5 Crosstabulation among risk perception,target number,target type,and driving years
1)驾驶经验不足人群中,“安全”感知能力驾驶人群占比39.5%,“一般”感知能力驾驶人群占比26.9%,“危险”感知能力驾驶人群占比33.6%;驾驶经验丰富人群中,分别占比22.3%,33.0%,44.7%。
2)“安全”感知能力驾驶人群中,“新手”驾驶人占比49.5%,“熟练”驾驶人占比50.5%;“一般”感知能力驾驶人群中,分别占比31.1%,68.9%;“危险”感知能力驾驶人群中,分别占比29.4%,70.6%。综合以上信息及图3(c)说明驾驶经验不足人群中,驾驶人群的风险感知能力分布相对分化;驾驶经验丰富人群中,“危险”感知能力驾驶人居多,这可能是由于“经验”导致;风险感知能力差的驾驶人多见于驾驶经验丰富人群。由于本次试验“熟练”驾驶人数与“新手”驾驶人数配比并不均衡,结果还须进一步论证。性别与驾驶人风险感知能力之间不存在相关关系(见表4,p=0.329),故不对其展开论述。
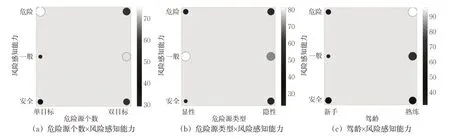
图3 危险源个数、危险源类型、性别与风险感知能力散点图Fig.3 Relationship between risk perception,target number,target type,and gender
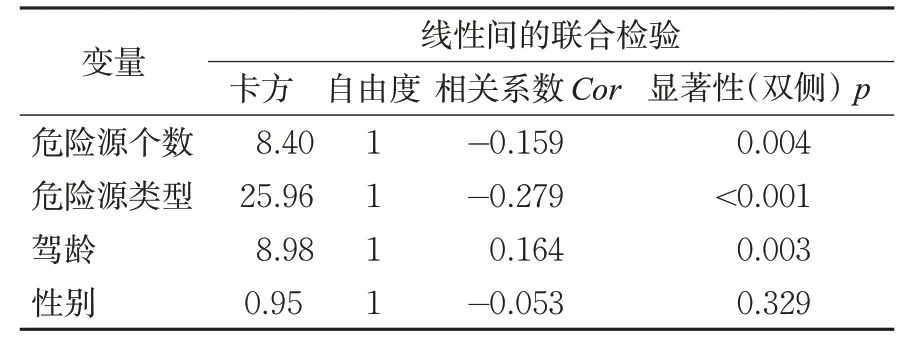
表4 Mantel-Haenszel检验结果Tab.4 Results of Mantel-Haenszel test
驾驶人在危险场景下的驾驶行为、眼动特征的描述性分析见表6,与风险感知能力的Spearman相关分析结果见表7。由表7可知,车速、纵向加速度、刹车深度、制动反应时间、制动反应位置、HSS、首次注视时间与风险感知能力显著相关(p<0.001,p=0.003,p<0.001,p<0.001,p<0.001,p<0.001,p<0.001,p=0.037),其中车速、制动反应时间、制动反应位置与风险感知能力强相关(Cor=0.508,Cor=0.734,Cor=0.742);方向盘旋转率、VSS、注视次数与风险感知能力不存在相关关系(p=0.341,p=0.813,p=0.608)。结合表6与图4信息可知,“危险”感知能力驾驶人群的车速偏高且加速度更大,转动方向盘的角度更大,刹车深度更深,从发现危险事件到采取行动需要更多的反应时间,这与A.Hill等[23]的研究结果一致;“安全”感知能力驾驶人群倾向以较低的车速、更为平缓的加速度应对危险事件,在距离危险事件很远时便能察觉到危险,行车状态下对外界环境的搜索范围广且当危险事件发生时可迅速察觉并采取行动。风险感知能力迟钝的驾驶人预判状况是否发生的能力较差,会对外界环境中的某一处长期观察,因此无法快速、有效地锁定危险事件,在此情景下一旦察觉便会紧急采取避险措施,如紧急制动,急转方向盘等。风险感知能力敏锐的驾驶人能够预先全面地分析道路和交通状况,快速对不利状况采取正确行动。

图4 显著因子在风险感知能力下的分布图Fig.4 Distribution of significance factors under risk perception
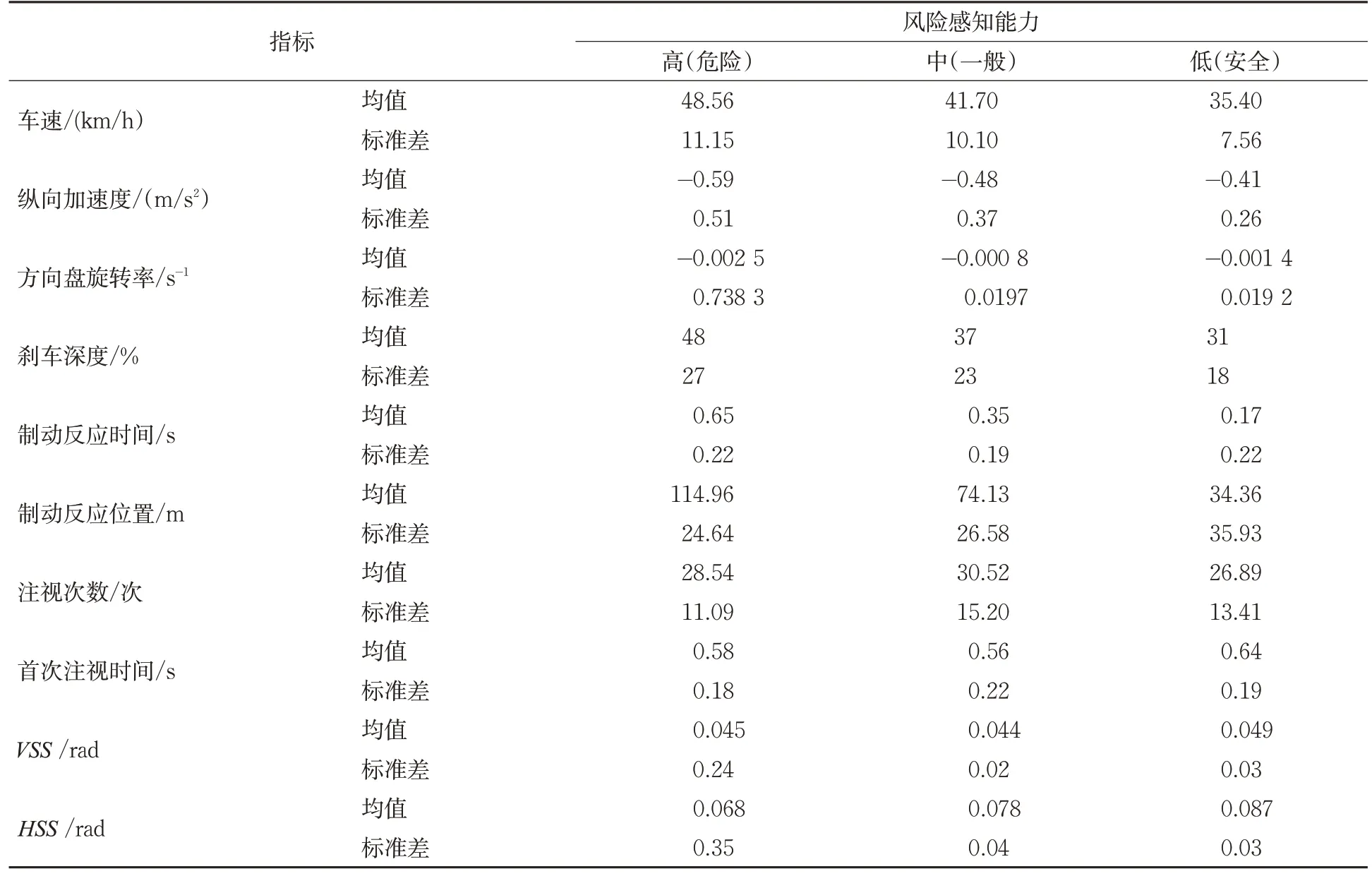
表6 描述性分析Tab.6 Descriptive analysis

表7 Spearman相关结果Tab.7 Results of Spearman correlation
3.2 特征个数对模型性能的影响
为寻找模型的最优输入特征集,本文利用随机森林(Random Forest)算法对特征进行重要性排序[24],在此基础上分析不同特征个数输入对模型性能的影响。
随机森林是1种组合多个决策树的Bagging类型集成学习算法,最终结果由所有树分类结果的众数而定。随机森林能够度量每个特征的重要性,因此可用来筛选特征。其思想是将特征在每棵树上的贡献求和取均值后,比较所有特征的贡献大小。
本文使用该算法对备选特征集中的14个指标进行重要性排序,为后续分析提供依据。见图5,制动反应位置、制动反应时间、车速、刹车深度、纵向加速度等特征的重要性较高,对判别结果贡献较大。
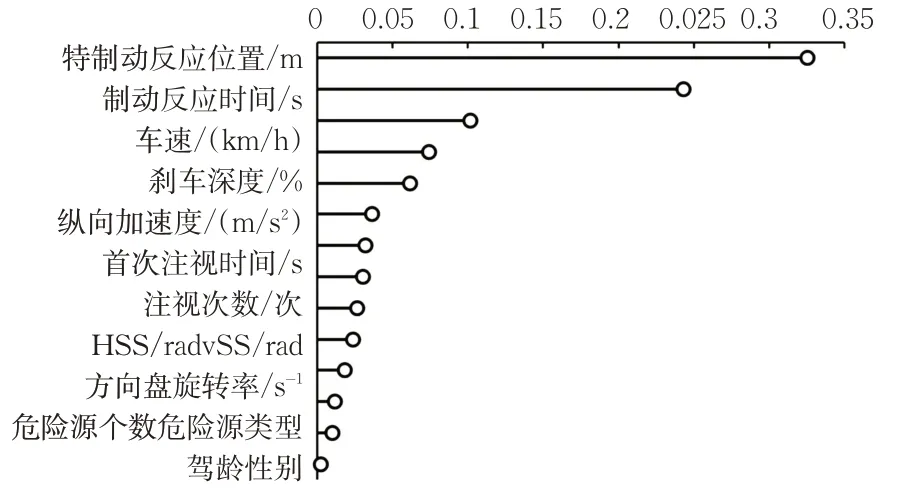
图5 特征重要性Fig.5 Importance of features
为探究特征个数对模型性能的影响,将排序后的特征指标作为输入训练模型,并在测试集上采用精度(accuracy)、F1值、查准率(precision)、查全率(recall)进行模型评估,结果见表8。查准率和查全率是一对矛盾的评价指标,F1值作为查准率和查全率的调和平均,可更好地度量模型性能,见图6。
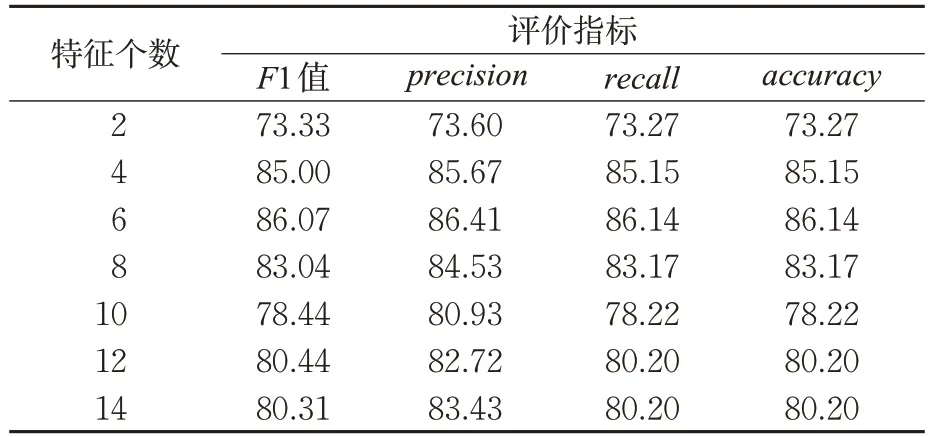
表8 不同特征数下的模型性能Tab.8 Performance evaluation indicators of different features%
据表8与图6可知:当特征个数小于2/4/6时,F1值呈上升趋势,此时模型欠拟合;当特征个数大于6后,F1值呈下降趋势,原因可能是模型过拟合。当特征个数为6时,模型性能最优,此时输入指标为:制动反应位置、制动反应时间、车速、刹车深度、纵向加速度、首次注视时间。因此选用这6个指标作为判别模型的输入。

图6 特征数与F1值的关系Fig.6 Relationship between the number of features and F1
3.3 模型评价
驾驶人风险感知能力判别模型建立完成后,须评估其泛化能力。本文拟采用精度(accuracy)、F1值、查准率(precision)、查全率(recall)评估模型性能,并与支持向量机(SVM)、AdaBoost算法进行对比,结果见表9。由表9可知:与SVM、AdaBoost算法相比,LightGBM模型的分类效果更优。

表9 3种模型的性能比较Tab.9 Performance of three models%
4 结束语
笔者针对驾驶人风险感知能力评价设计了驾驶模拟实验,将交通冲突时间(TTC)作为评价指标,综合考虑了危险源个数与类型、驾驶人个人特性、驾驶人驾驶行为与眼动特征等因素,分析了这些因素与风险感知能力之间的关系并构建了驾驶人风险感知能力判别模型。主要结论如下。
1)危险源个数(单/双)、危险源类型(显/隐)与驾驶人风险感知能力存在负相关关系。驾龄与驾驶人风险感知能力存在正相关关系。车速、纵向加速度、刹车深度、制动反应时间、制动反应位置、HSS、首次注视时间与风险感知能力显著相关。
2)相比于SVM、AdaBoost等算法,基于LightGBM算法的模型判别能力最好。建立模型前借助Random Forest算法对特征进行了重要性排序,并分析了不同特征输入个数对模型性能的影响。结果表明,当特征个数为6,特征分别为制动反应位置、制动反应时间、车速、刹车深度、纵向加速度、首次注视时间时的模型效果最好。
TTC作为驾驶人风险感知能力衡量标准的前提是驾驶人面对危险事件时采用的是制动避险,后续研究中将考虑其他避险方式(如换道避险),并将驾驶人生理指标(如心率、脑电波等)、道路交通环境等因素纳入模型,建立更为全面的风险感知能力判别方法。此外,本文试验方式为驾驶模拟,与真实道路环境存在一定差异,被试数量不够多,类型不够全面,后续将结合其他试验方式并充实样本开展进一步的研究。
