单绕组无轴承磁通切换电机缺两相容错控制
2021-09-14刘汪彤周扬忠
刘汪彤,周扬忠
(福州大学 福建省新能源发电与电能变换重点实验室,福州 350108)
0 引 言
无轴承电机是一种利用电磁力使定转子完全隔离的新型电机。永磁型无轴承电机以其无摩擦、易维护、高效率的优点,在半导体工业、化工、机械、生命科学、飞轮储能等领域发挥重要作用[1]。普通永磁电机的永磁体安装在转子侧,为了克服其不易维护、降温困难的弱点,安装于定子侧的磁通切换电机应运而生。磁通切换电机结构简单可靠,永磁体不易脱落并且更容易实现降温处理,因此更适合高速运行工况[2]。磁通切换电机的永磁体是空间对称分布的,虽然其永磁体在电机旋转时位置不变化,但也能得到高度正弦的反电动势[3]。无轴承磁通切换电机(以下简称BFSPMM)将无轴承技术应用于磁通切换电机上,拥有无轴承和磁通切换电机的优点。随着BFSPMM的应用工况越来越严苛,其容错控制的研究也变得越来越重要。
BFSPMM按绕组结构主要分为双绕组结构和单绕组结构。双绕组结构在定子上安装两套独立的绕组,一套绕组用于产生切向的转矩分量,另一套绕组用于产生悬浮力。由于在定子上绕有两套绕组,其定子绕线空间紧张,铁心、永磁体利用率较低,两套绕组之间的耦合复杂。单绕组结构的定子只绕有一套绕组,结构简单,转矩和悬浮力分量通常通过多相电机的形式,在数学上进行变换达到解耦控制。因此,想要在缺相的情况下稳定控制转矩和悬浮力,对电机进行解耦控制是容错控制的研究重点。
文献[4]研究了BFSPMM在缺一相故障下的数学模型,其利用o2零序电流做平衡通路,基于电流滞环控制的方法实现了转矩和悬浮力在带载情况下的稳定控制。文献[5]证明了六相无轴承永磁薄片电机仅在缺单一相、缺相邻两相和缺对称两相才可以稳定控制。
本文针对单绕组BFSPMM,推导了缺相情况下引入零序电流控制的数学模型,提出一种在缺相邻两相或缺相对两相的情况下实现稳定控制转矩和悬浮力的控制策略和电路拓扑。介绍了拓扑结构及其推导解耦公式的过程,分析了各相电流与转矩和悬浮力之间的关系。基于MATLAB实现了缺相下的电机仿真。
1 缺相情况下的电流控制公式的推导
1.1 BFSPMM拓扑结构及缺相控制电路拓扑结构
本文所研究电机的拓扑结构如图1所示。定子部分由12个U形铁心和12个永磁体沿切向方向依次连接而成。相邻永磁体所产生磁通集中在定子齿上,具有“聚磁效应”,可以有效减少永磁体的用量。这样的结构在保证较强转矩输出能力的同时,通过调制气隙磁场实现电机悬浮运行。转子由带有10个齿的硅钢片压叠而成,电机极对数与转子齿数目一致[3]。转子角度的参考起点为A1轴逆时针9°处,如图1所示。

图1 电机拓扑结构
对于六相电机可以用T6矩阵进行解耦[7],得到如下电流变换:
(1)
(2)
式中:inT(n=A,B,C,D,E,F)为自然坐标系下相电流中转矩分量;inS(n=A,B,C,D,E,F)为自然坐标系下相电流中的悬浮分量;ino1为自然坐标系下相电流中的o1零序电流分量(n=A,B,C,D,E,F);ino2为自然坐标系下相电流中的o2零序电流分量(n=A,B,C,D,E,F);iαT、iβT为Clarke变换后静止坐标系下的转矩电流;iαS、iβS为Clarke变换后静止坐标系下的悬浮电流;io1为Clarke变换后静止坐标系下o1零序电流;io2为Clarke变换后静止坐标系下o2零序电流。
电机的单相电流在永磁体磁场下产生的悬浮力公式[8]:
(3)
式中:系数kPMDC表示在永磁磁场作用下单位相电流产生的悬浮力所对应的直流偏置;kPM表示在永磁磁场作用下单位相电流产生的悬浮力幅值。这两个系数均可以由有限元仿真得到。
由式(3),在永磁体磁场的作用下,当仅注入转矩电流时,可以得到:
(4)
当仅注入悬浮电流时,可以得到悬浮力公式:
(5)
式中:θr为转子电角度。
当仅注入o1零序电流时,可以得到悬浮力公式:
(6)
当仅注入o2零序电流时,可以得到:
(7)
以上公式表明,在正常运行情况下,转矩电流和o2零序电流不会产生悬浮力。由于io1为六相供电系统的零序电流,为了让io1也发挥出悬浮力的作用,必须向中性点通入电流,故提出如图2所示的逆变器控制电路。
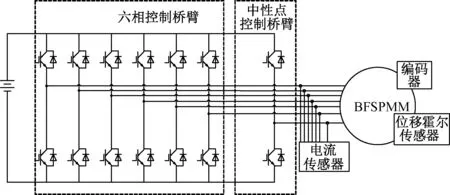
图2 逆变器控制系统拓扑
1.2 缺两相时电流公式推导
当电机发生断路时,容错控制的方法是在六相电机的数学模型下,使断路相电流控制为0的条件下对电机进行控制。
以缺A、B两相为例,将iA=0、iB=0代入式(2),可得:
(8)
(9)
整理可得:
(10)
(11)
(12)
此时,中性点桥臂电流:
(13)
利用有限元分析,分别由式(12)给定iαT、iβT、iαS、iβS单位电流,可以得到图3。需要注意的是,此时的iαT、iβT、iαS、iβS并不是单纯的转矩平面电流和悬浮平面电流,而是通过控制零序电流在数值上平衡后的结果。在这种控制方式下,由于io1中有iαT分量,又由式(6)表明io1可以产生悬浮力,所以通入的转矩电流通过零序电流的耦合也会产生悬浮力。在转矩动态控制时,对悬浮力控制会产生影响。

图3 缺AB相时,不同电流分量产生的悬浮力仿真
将式(12)代入电机电磁功率公式可得:
(14)
式(14)中只有转矩电流对电磁功率的关系,表明稳态时转矩控制部分不会受到悬浮电流的影响。
由于缺AC相和AE相时,无法用iαT、iβT、iαS、iβS来同时表示io1、io2,所以不能用本文方法进行缺两相容错控制。
缺两相的电流给定公式如表1所示。
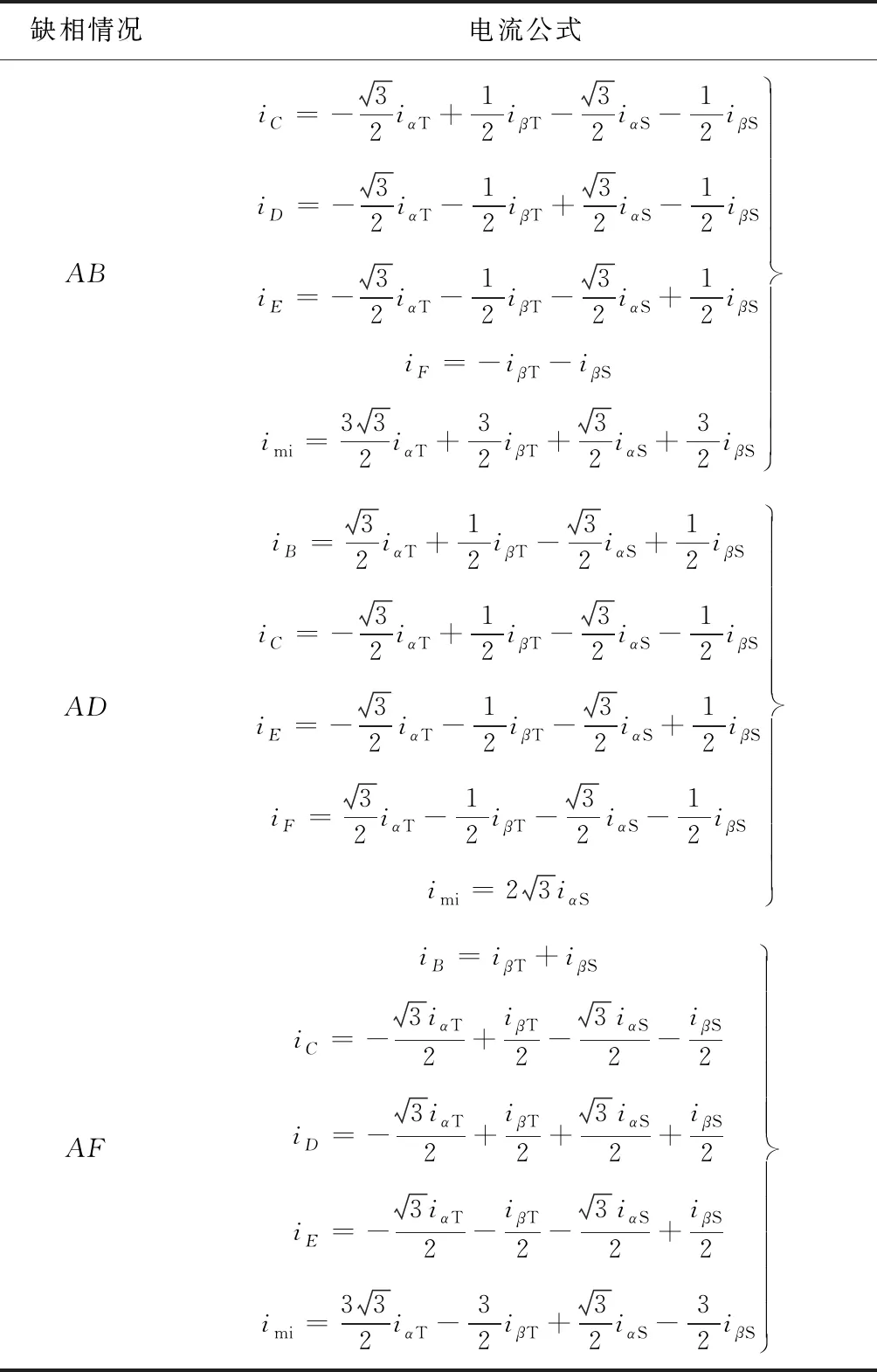
表1 电流给定公式
2 缺两相情况下悬浮力公式推导
以缺A、B相为例,此时电机中的磁场分量有永磁体磁场、转矩电流产生磁场、悬浮电流产生磁场和零序电流产生磁场。根据文献[8],这些磁场会相互影响,对悬浮力的产生起到不同程度的作用。考虑悬浮电流在永磁体磁场下,经过转矩磁场的偏置作用后,由式(5)得到的悬浮力公式:
(15)
考虑零序电流io1在永磁体磁场下,经过转矩磁场的偏置作用后,由式(6)得到的悬浮力公式:

(16)
式中:kαSβSdT代表单位iαS悬浮电流或者iβS悬浮电流在单位idT电流建立的磁场下产生的x、y方向的悬浮力基波分量幅值;kαSβSqT代表单位iαS悬浮电流或者iβS悬浮电流在单位iqT电流建立的磁场下产生的x、y方向的悬浮力基波分量幅值;ko1dT代表单位io1电流在单位idT电流建立的磁场下产生的x、y方向的悬浮力基波分量幅值;ko1qT代表单位io1电流在单位iqT电流建立的磁场下产生的x、y方向的悬浮力基波分量幅值。kαSβSdT、kαSβSqT、ko1dT、ko1qT均可通过有限元分析求得。
φαSβSdq、φo1dq分别表示:
(17)
(18)
此时还需要对悬浮电流所产生磁场与零序电流所产生磁场的耦合关系进行分析。在去掉永磁体磁场的情况下,分别通入单位idT、iqT、单位iαS、iβS电流与单位io1电流组合,有限元分析如图4所示。由于悬浮平面磁场和零序平面磁场耦合产生的悬浮力很小,故在此忽略不计。

图4 o1电流与其他平面的磁场耦合产生的悬浮力
利用式(15)、式(16)即可得到最终的悬浮力。其中io1提供的悬浮力公式:
(19)
由式(19)可得转矩电流通过io1产生的悬浮力:
(20)
除去转矩电流提供的悬浮力外,总的悬浮力:

(21)
缺AD两相时,io1提供的悬浮力:
(22)
可见缺AD两相时,转矩电流不会产生悬浮力。
总的悬浮力:

(23)
缺AF两相时,io1提供的悬浮力:
(24)
转矩电流通过io1产生的悬浮力:
(25)
除去转矩电流提供的悬浮力外,总的悬浮力:
(26)
3 缺两相情况下电流限幅策略
电机的电流设计都是有上限的,电机运行电流不可能无限增大。在缺两相的条件下,电机的相电流比健康时增大很多,同时从图3可以看出,转子在某些位置时(例如图3中转子位置在60°和240°附近,由iβS控制时),需要很大的电流才能输出期望的悬浮力,增加了电机的控制难度。增加限流是一个必要的环节。通过第二小节的分析可以看出,该电机的电流成分较多,耦合复杂。如果采用直接的相电流限幅,即给定电流超过最大限幅数值,就维持在最大限幅数值上的方案,会造成电流成分不明,耦合混乱的情况,电机将无法正常运行。需要一种新的限流方法,严格控制相电流中转矩分量和悬浮分量的大小。
电流限幅必然会带来运行性能的恶化,本文以转矩控制为优先的原则,优先保证转矩电流的给定。当相电流限幅为ismax、ismin时,对于AB缺相情况,由式(12)、式(13)可得悬浮电流的限幅:
(27)
由悬浮力式(21)可知,x方向悬浮力和y方向悬浮力的比值与悬浮平面α轴的电流和β轴电流的比值线性相关,即可表示:
(28)
式中:a11、a12、a21、a22为化简所得系数;r为悬浮力缩放系数。令iβS=r1iαS,则:
(29)
将式(29)代入式(28),仅用iαS表示悬浮力,得:
(30)
上式表明,在某一个转子位置时刻,只要保持iαS和iβS的比值,就可以保持悬浮力出力的方向不变。

图5 相电流限流步骤流程图
电流的限幅流程如图5所示。第一步,把初步的悬浮力算出的给定电流和转矩电流代入式(27),确定是否存在超限情况,超限的是哪几个相;第二步,如果有超限幅的情况,记录超限的悬浮电流,由式(29)确定电流比例系数固定出力方向;第三步,将式(29)计算缩放后的iβS代入式(27),得到可用悬浮电流的最大值和最小值,确定电流iαS选择的范围,如果无法求出选择范围,令悬浮电流iαS、iβS为0;第四步,将计算出的电流范围与超限的悬浮电流做对比,最大限度地输出限幅的悬浮电流。
由于可以确保悬浮力方向的正确性,即使悬浮力因电流限幅达不到给定悬浮力幅值,也可以确保减缓转子的径向悬浮位置进一步恶化。
4 缺两相情况下电机控制策略及仿真
当电机缺A、B相时,控制框图如图6所示。

图6 缺AB相系统控制框图

电机参数如表2所示。
在AB缺相下,给转子x方向y方向各施加100 N,初始转速给定600 r/min,0.5 s时转速给定750 r/min,相电流限幅为30 A,直流母线电压为80 V时,仿真结果如图7~图9所示。

表2 BFSPMM模型参数
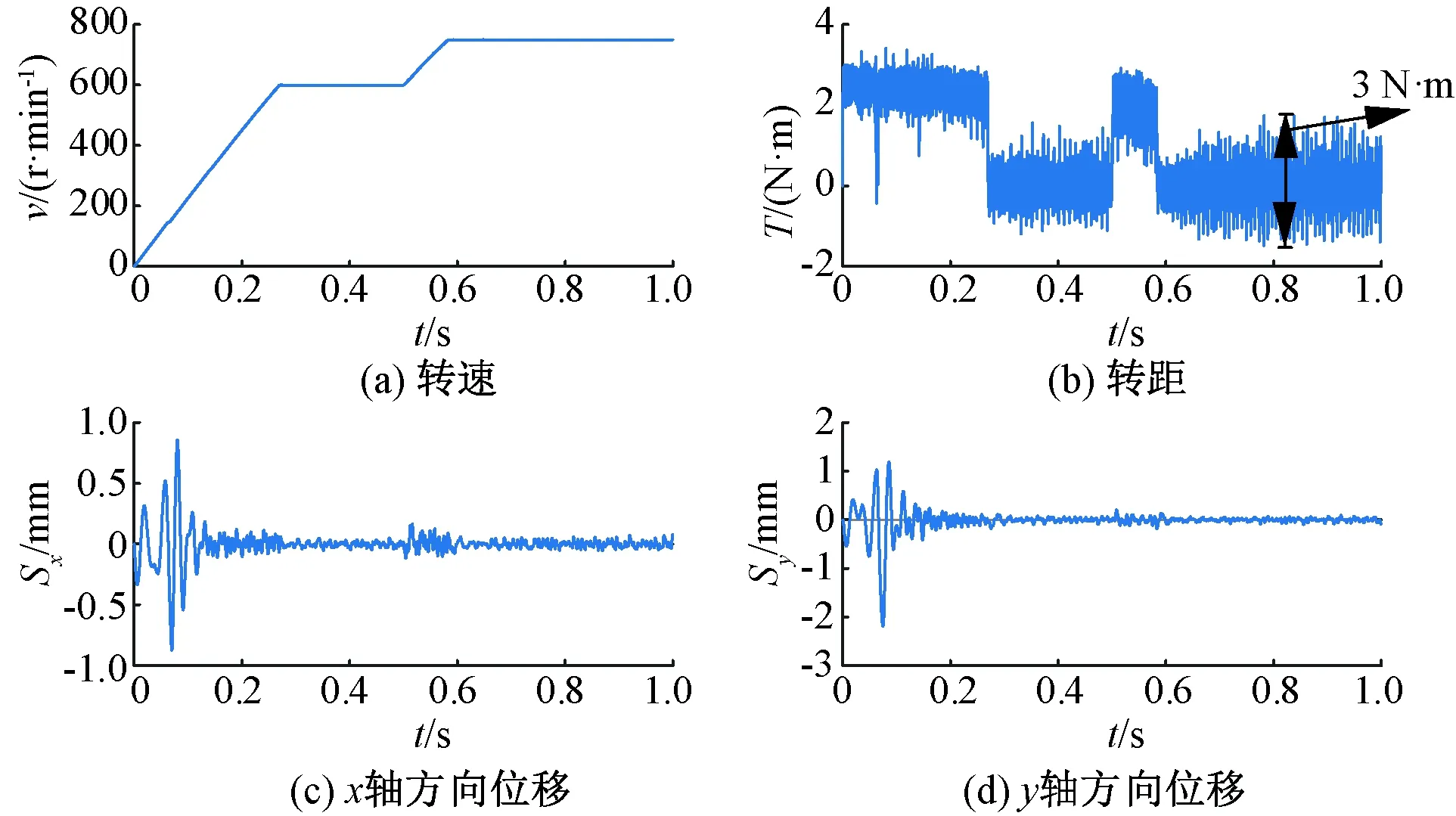
图7 缺AB相仿真结果(限幅30 A)

图8 缺AB相各平面电流给定仿真结果 (限幅30 A)

图9 缺AB相相电流数值仿真结果 (限幅30 A)
由图7仿真结果可以看出,本文的控制策略可以有效控制电机的转速和悬浮。起动0.15 s后电机表现趋于稳定。电机在750 r/min稳态时,转矩脉动在±1.7 N·m以内,转速脉动在±1.5 r/min以内,径向位移脉动在±0.005 mm以内。在600 r/min到750 r/min动态过程中,径向位移脉动在±0.02 mm以内。由图8、图9仿真结果可以看出,本文的电流限幅策略有效可行,动态和稳态过程中电流幅值均未超过±30 A。
5 结 语
本文针对单绕组BFSPMM提出一种基于零序电流控制的缺相容错控制策略,推导了缺相邻两相和缺相对两相的控制公式。最后用Simulink仿真,结果验证了本文方法的可行性。主要研究结论如下:
(1)控制零序电流的容错运行策略只适用于缺相邻两相和缺相对两相。隔一相的缺两相无法应用本文控制策略。由于需要引入零序电流io1参与控制,必须引出中心点,并对其电流加以控制。
(2)仿真结果证明方案可行。电流限幅控制策略可以有效地限制住相电流的大小,实现悬浮运行。
(3)缺相情况下,虽然可以实现悬浮,但是脉动较大,所需要的相电流也较大。需要进一步研究相关控制策略,提高控制效果。