具有单位功率因数输出的逆变电源研究
2021-09-14胡琴,李宏,高龙
胡 琴,李 宏,高 龙
(1.西北工业大学 航海学院,西安 710072; 2.宁波荣特电子有限公司,宁波 315000)
0 引 言
可控的三相交流电源作为能量变换装置被应用于国防、工业以及日常生活中的各个领域,传统的基于两电平逆变器的逆变电源已不能满足更高的技术需求。为了得到单位功率因数输出且THD小的三相可控电源,T型三电平逆变器[1-3]拓扑得到了广泛的重视,成为了研究热点[4]。
T型三电平逆变器是一种新颖的拓扑结构,开关器件损耗小,结构简单,运行效率高。脉宽调制方法是T型逆变器性能实现的关键,文献[5]对比了SPWM算法与SVPWM算法的区别,其主要差异在于直流侧电压利用率,SVPWM算法的电压利用率高,并且能明显减小逆变器输出电流的谐波成分。文献[6-7]采用传统的SVPWM算法对T型逆变器进行控制,由于需要进行大量的三角函数计算和表格查询,在线计算存在一定的难度。文献[8-9]采用了60°坐标系下SVPWM算法,此算法可省略大量的三角函数计算,但步骤仍有些繁杂。
随着逆变电源的广泛应用,其所带负载也呈现多样化发展。非线性负载会使逆变器的输出电压和电流存在相位差,继而导致输出的有功功率变小[10-13],因此,提高带非线性负载的逆变电源的功率因数成为逆变电源品质保障的关键因素。文献[14]通过指令电流参考进行补偿,减小电压与电流的相位差,此方法可靠性高,但仅限在电流型控制中使用。文献[15]通过谐振控制策略有效抑制逆变器输出电压中的谐波分量,提高了输出电能的质量。
本文对T型三电平逆变器在控制算法与功率因数校正两方面进行分析,参考文献[16]省略小扇区判断过程的思想,对60°坐标系下SVPWM算法进行优化,并将此方法引申到T型三电平逆变器上。以三相参考电压的角度为三相合成矢量的相位角,采用电压外环与电流内环的双闭环控制,实现了单位功率因数输出。
1 SVPWM算法的优化方法
T型三电平逆变电源拓扑结构如图1所示。
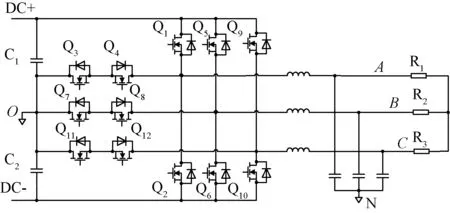
图1 T型三电平逆变器拓扑
T型三电平逆变器每相电压状态分别为P、O、N,共有33=27种电压状态,对应27种电压矢量。
1.1 坐标转换

设参考矢量Uref在平面直角坐标系下的坐标为(Ua,Ub,Uc),60°坐标系中的坐标为(Ug,Uh),根据两坐标系的线性关系以及Clarke变换可得:
(1)
并将参考电压矢量进行标幺化处理,即:
(2)
60°坐标系下的有效基本矢量图如图2所示。

图2 60°坐标系下三电平电压空间矢量图
1.2 确定基本矢量
已知在60°坐标系中,基本矢量坐标均为整数,可利用这一特点优化SVPWM算法。


图3 4个最近矢量的坐标组成的菱形
其中,Usx和Uxs是3个最近基本矢量的其中2个,通过对角线Usx-Uxs来判断第3个最近的矢量。设Usx的坐标为(Usxg,Usxh),在60°坐标系中,对角线的方程:
Ug+Uh=Usxg+Usxh
(3)
当Ug+Uh-Usxg-Usxh<0时,Uxx是第3个最近的矢量;当Ug+Uh-Usxg-Usxh>0时,Uss是第3个最近的矢量。因此,参考矢量的3个最近的基本矢量得以确定。
1.3 基本矢量的作用时间
设U1,U2和U3分别为3个最近的基本矢量;t1,t2和t3分别为U1,U2和U3的作用时间;Ts为一个PWM周期。根据伏秒平衡可得:
(4)
令U1=Usx,U2=Uxs,U3=Uss或Uxx,设(U1g,U1h),(U2g,U2h),(Ussg,Ussh)和(Uxxg,Uxxh)分别为U1,U2,Uss和Uxx的坐标。从两方面进行分析。
当U3=Uss时,将3个矢量坐标代入以下方程组:
(5)
已知:U1g=Ussg;U2h=U3h;U3h-U1h=1;U3g-U2g=1,解得:
(6)
同理,当U3=Uxx时,得:
(7)
1.4 矢量作用次序
最后要确定3个最近基本矢量的作用次序。首先按照传统方法将正六边形平均分为6个大扇区,每个扇区按照第3个基本矢量分为两种情况,共有12种基本矢量作用顺序。对图2的参考电压矢量Uref进行调制时,第三矢量V3=Vss,七段式脉冲序列为:Vsx→Vxs→Vss→Vsx→Vss→Vxs→Vsx。得到七段式PWM输出波形后,可确定每段波形所对应的各相元器件的开关状态,实现对逆变器三相控制。
2 单位功率因输出
(8)
阻抗是一个复数,其模表示电压、电流振幅值或有效值的比值;而幅角φZ代表电压电流的相位差,即阻抗角。
T型三电平逆变电源控制框图如图4所示,采用电压外环与电流内环的双闭环控制。
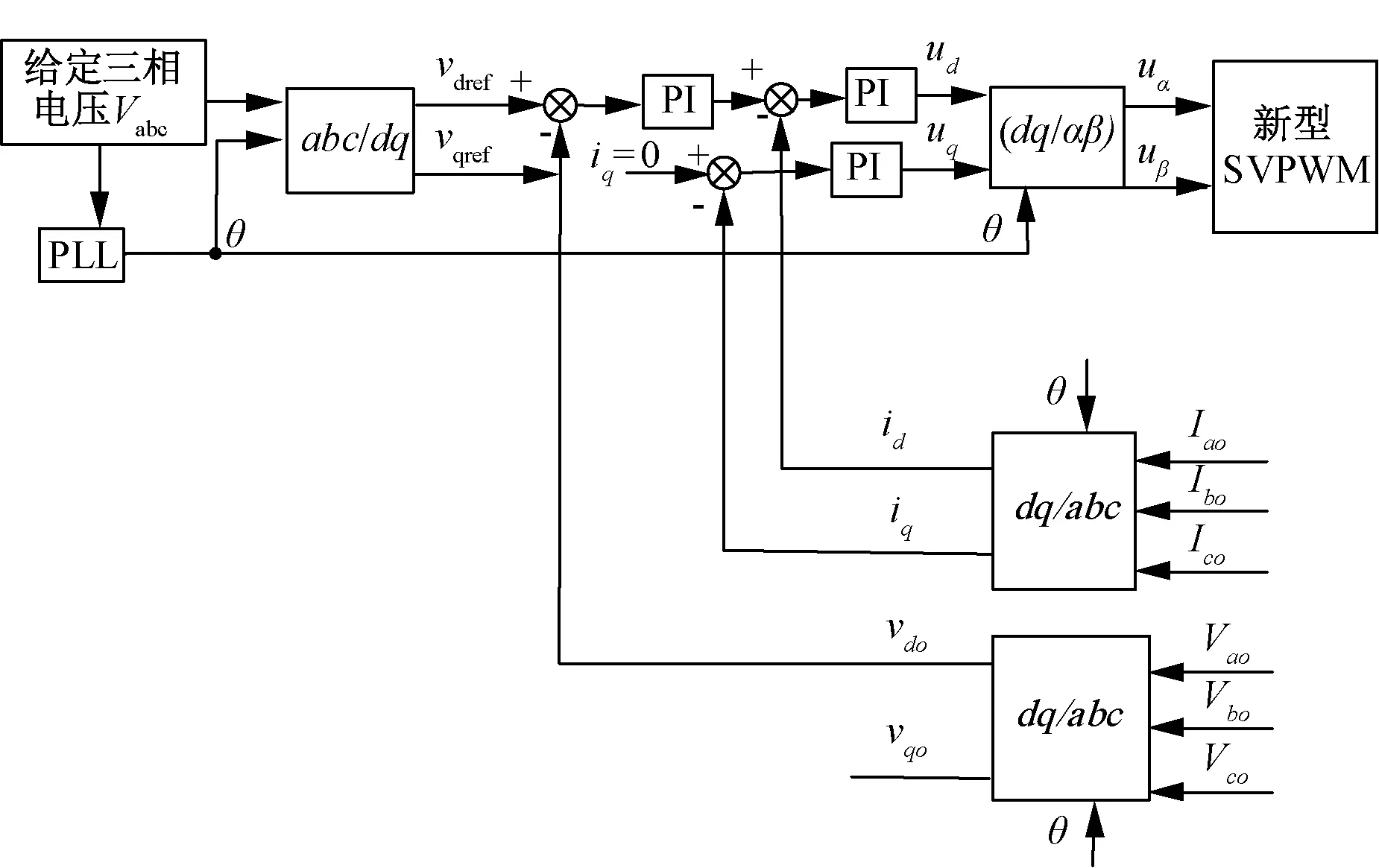
图4 T型三电平逆变电源控制框图
由图4可知,给定三相参考电压Ua,Ub,Uc,利用锁相环得到三相合成矢量相位角θ。即:
(9)
通过θ将给定的三相静止坐标系的参考电压转化到d-q坐标系中,得到旋转坐标系上的参考电压Udref,Uqref:
(10)
用同样的方法将负载端输出的三相相电压Va,Vb,Vc转化到d-q坐标系得到旋转坐标系下的反馈电压ed,eq:
(11)
(12)
将ed与Udref对比,得到d轴的误差,通过PI调节器得到d轴的参考电流id,同时给定q轴参考电流为0。仍使用θ,将负载端输出的三相电流ia,ib,ic转化到d-q坐标系得到反馈电流id,iq:
(13)
(14)
将参考电流与反馈电流相减得到的误差经过PI调节得到Ud,Uq,并用θ做反Park变换,得到90°坐标系下的参考电压:
(15)
最后将此参考电压变换到60°坐标系中,进行SVPWM控制。
需要强调的是,无论是在三相电压给定、负载端电压反馈还是三相电流反馈中,均使用由锁相环得到的三相合成矢量的相位角θ进行坐标系变换。与此同时,稳态下,根据控制结果,输出电压和电流会对给定进行良好跟踪,q轴电流为0,确保了电流与电压的同相位输出,无功功率为0,实现了逆变器的单位功率因数输出。此方法易实现,且局限性小。
3 仿真结果与分析
为验证所提出的SVPWM控制策略以及实现单位功率因数输出的正确性,在MATLAB/Simulink中建立仿真模型。
给定直流侧电压为600 V;直流侧电容C1=C2=600 μF;输出端LC滤波参数:La=Lb=5 mH,Ca=Cb=Cc=10 μF;三相参考电压幅值为325 V;采样频率为10 kHz;系统输出频率为50 Hz。
T型三电平逆变器输出的三相线电压波形如图5所示,三相相电压波形如图6所示。验证了T型三电平逆变器中采用新型SVPWM算法的有效性。

图5 三相线电压稳定状态下的局部波形图

图6 三相相电压稳定状态下的局部波形图
当逆变器三相负载为电阻与电容并联时,R1=R2=R3=8 Ω,C1=C2=C3=50 μF,负载端相电压与相电流的输出波形如图7所示,输出相电压的谐波分析如图8所示。由图8可知,THD=0.08%。当逆变器三相负载为电阻与电感串联时,R1=R2=R3=8 Ω,L1=L2=L3=1.5 mH,负载端相电压与相电流的输出波形如图9所示,输出相电压的谐波分析如图10所示。由图10可知,THD=0.26%。可以看出,在不同类型负载下的功率因数角及THD都很小,精准地实现了在不同情况下T型三电平逆变器的单位功率因数输出。
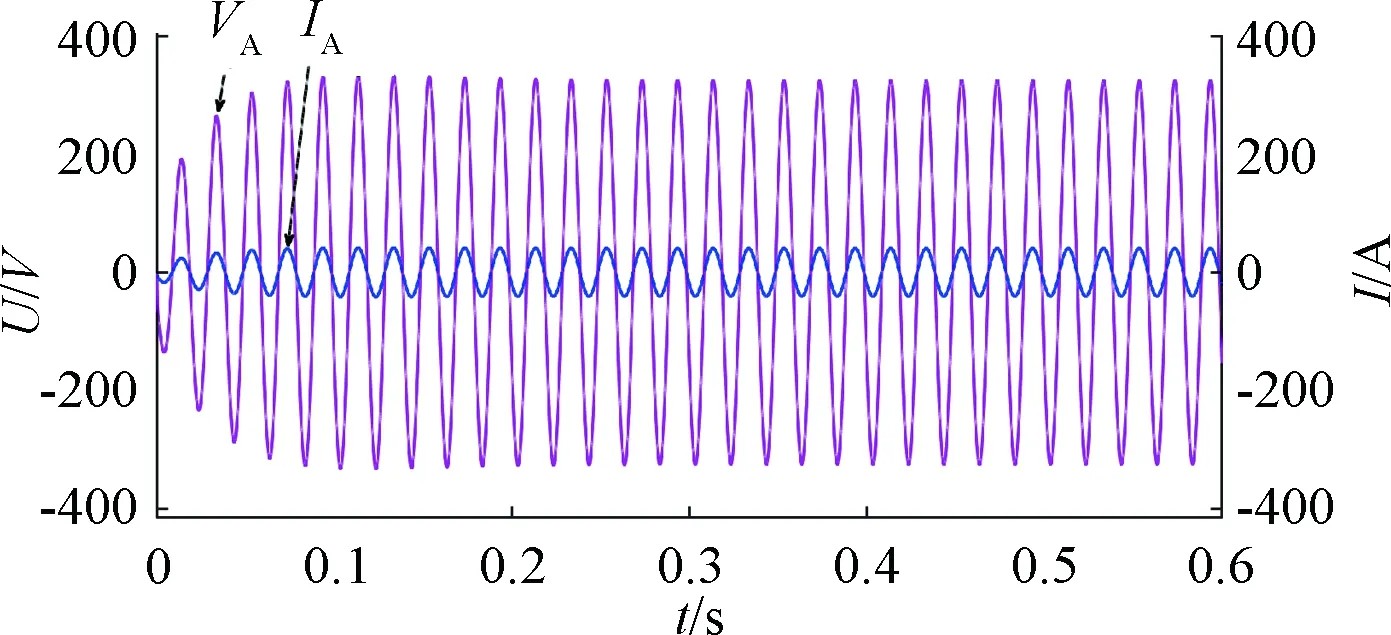
图7 阻容性负载时电压与电流的输出波形
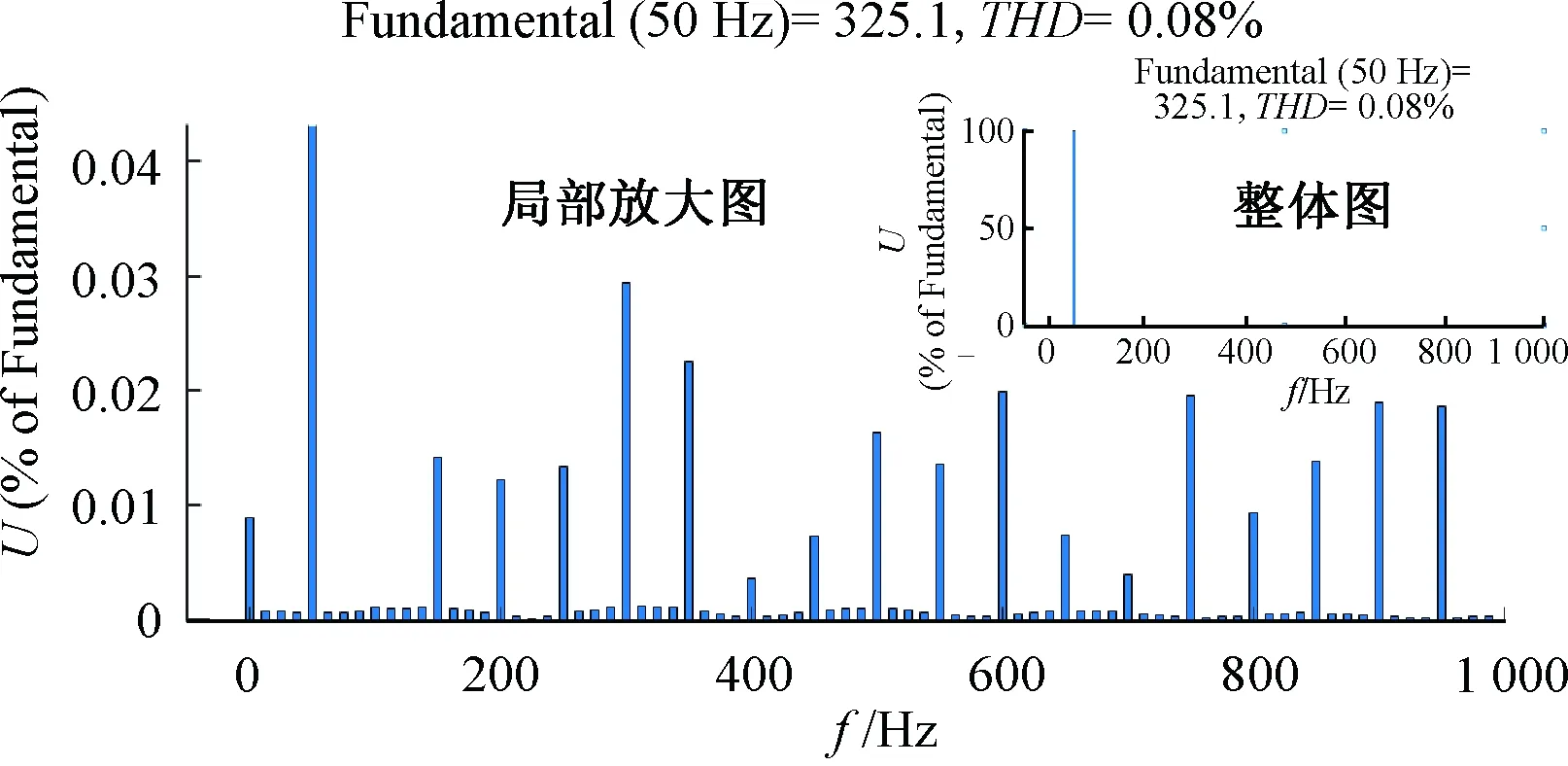
图8 阻容性负载时相电压谐波分析图
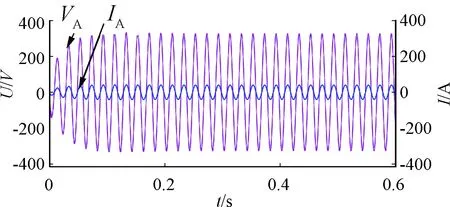
图9 阻感性负载时电压与电流的输出波形
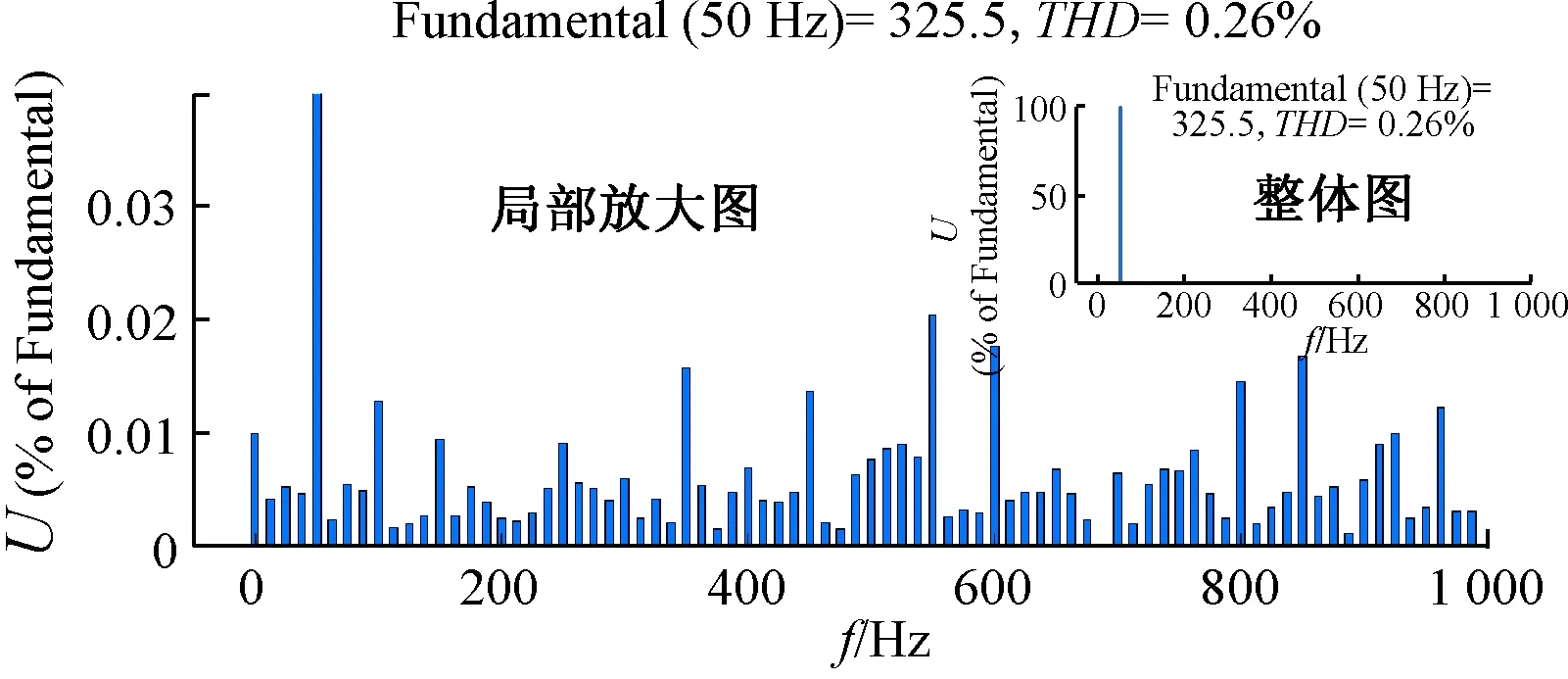
图10 阻感性负载时相电压谐波分析图
4 结 语
本文详细介绍了60°坐标系下SVPWM的控制算法,该方法不需要复杂的三角函数计算,并且可以省略小扇区判断的步骤,大大降低了工作量。同时通过三相合成矢量的相位角的使用,实现了单位功率因数输出。仿真结果证明了本文控制方法的有效性,并可以引申到更多的逆变器拓扑上。