模块化多电平换流器自适应故障限流控制策略
2021-09-13赵西贝赵成勇许建中
樊 强,赵西贝,赵成勇,许建中
(新能源电力系统国家重点实验室(华北电力大学),北京市 102206)
0 引言
模块化多电平换流器(modular multilevel converter,MMC)虽无换相失败问题,且具有开关频率低、扩展性强等优点[1-2],但由于其低惯量、弱阻尼特性,直流故障的清除成为基于MMC的柔性直流(简称柔直)电网工程化应用面临的主要挑战之一[3-5]。
目前柔直工程大多采用半桥MMC,通过在直流线路上配置高压直流断路器(DC circuit breaker,DCCB)来清除故障[6]。DCCB的大体积和高建设成本不利于其工程化应用,因此需要在保证DCCB快速清除直流故障的前提下兼顾其经济性。目前主要有附加电抗器和附加控制两种方案来改善DCCB的经济性。
在附加电抗器方案[7-9]中,通过在故障回路中引入限流电抗器可有效降低断路器的开断电流,但由于限流电抗器本身制造成本高,因此换流器的建设成本和占地面积的改善作用有限。
附加控制方案在节约成本方面和工程化应用方面更具有优势[10-16]。文献[10]提出通过控制方法来增大故障期间故障电流回路等效阻抗,降低故障电流峰值和上升速度,但其在直流电网中的适用性还有待验证。文献[11]提出了故障期间旁路换流器所有子模块的思路,以达到抑制直流侧故障电流的效果,但也存在无法限制故障初期电流的发展和延缓系统恢复等缺点。文献[12-13]提出了基于混合型MMC的附加主动限流控制器,可有效减小故障电流峰值,但其对半桥MMC的有效性有待进一步验证。文献[14]提出了一种具有拓扑结构通用性的紧急限流控制策略,能够降低DCCB的开断电流和耗散能量,但也存在着无法限制初期故障电流上升速度的问题。文献[15-16]提出在故障中重构MMC桥臂电压参考值的方法,可有效限制故障电流的发展速度,但并未考虑故障清除后系统快速恢复问题。
基于此,本文提出了一种适用于半桥MMC柔直电网故障限流的自适应控制器。通过在故障期间重构MMC直流电压和桥臂子模块电容电压的参考值,可有效限制故障电流的快速发展并加快系统的恢复速度。全文分为4个部分:第1部分主要介绍了自适应控制器及其基本原理;第2部分理论推导了自适应控制器对半桥MMC故障电流的作用机理;第3部分在基于半桥MMC的四端直流电网模型中对自适应限流控制器进行了仿真,验证结果表明,此自适应控制器可在故障期间明显降低直流侧故障电流峰值,从而降低直流断路器的建设成本和体积,并可使故障后系统快速恢复;第4部分为总结。
1 自适应限流控制器的基本原理
柔性直流电网换流器组成的基本单元是MMC,当其发生直流侧故障时,MMC桥臂中投入的子模块电容经过直流电抗器和断路器通流支路向故障点馈入短路电流。在故障期间MMC单相投入的子模块总数将直接影响故障电流的上升速度和峰值。任意时刻下MMC桥臂子模块投入的个数(以A相为例)可由式(1)得出。
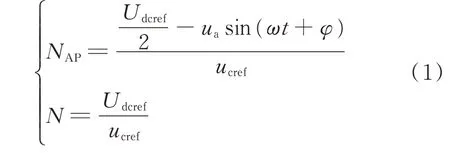
式中:Udcref为MMC直流侧电压的参考值;ucref为桥臂子模块电容电压的参考值;ua为A相调制波幅值;ω为角频率;t为时间变量;φ为调制波初相角;NAP为A相上桥臂实际投入的子模块个数;N为MMC单相投入的子模块总数。
从式(1)看出,通过在故障期间重构Udcref和ucref,可有效减少故障期间MMC单相投入的子模块总数,减少子模块电容的放电量,进而限制故障电流的上升速度和峰值。基于此,设计了自适应控制器。
1.1 含自适应控制的MMC主控制器
自适应控制包含可在故障工况下自适应重构MMC直流侧电压的直流限流控制环节和可在故障工况下自适应重构MMC的桥臂子模块电容电压的子模块电容电压控制环节,其框图如图1所示。
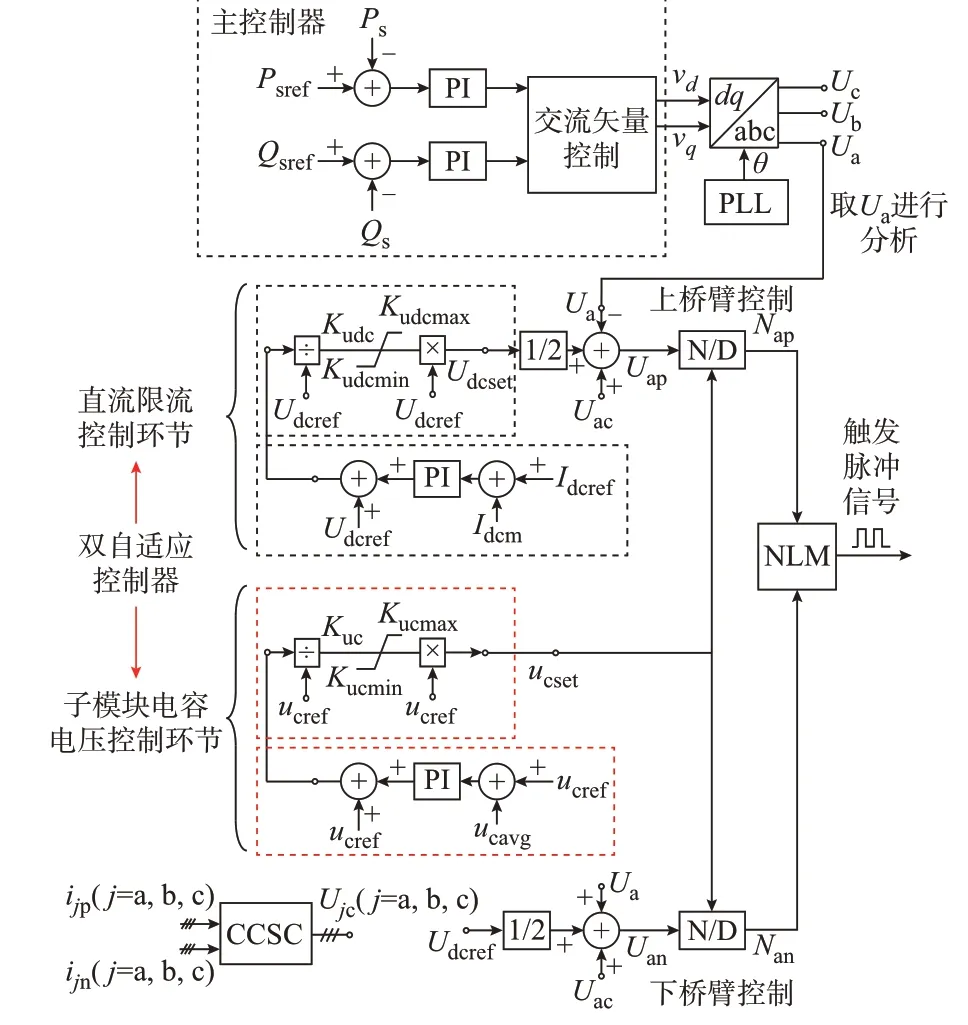
图1 含自适应控制器的MMC控制器框图Fig.1 Block diagram of MMC controller with adaptive controller
图1中主控制器部分为双闭环控制器[17]。图中Psref和Qsref分别为有功功率和无功功率的参考值;Ps和Qs分别为有功功率和无功功率的测量值;Ua、Ub、Uc为 三 相 调 制 波 电 压;vd和vq分 别 为 调 制 波 的有功分量和无功分量;PLL表示锁相环;θ为锁相环的 输 出 角;Idcref和Idcm为 直 流 电 流 的 参 考 值 和 测 量值;Udcref和Udcset为直流电压的参考值和设定值;Kudc为直流电压重构比,限幅范围为[Kudcmin,Kudcmax];ucavg为子模块电容电压的平均量测值;ucset为子模块电容电压的重构值;Kuc为子模块电容电压重构比,限幅 范 围 为[Kucmin,Kucmax];NLM(nearest level modulation)表示最近电平逼近调制[18];N/D表示除法运算;Uap、Uan分别为A相上、下桥臂电压;Nap、Nan分别为A相上、下桥臂投入子模块个数;CCSC(circulating current suppressing controller)表示环流抑 制 控 制 器[19];ijp、ijn分 别 为 三 相 上、下 桥 臂 电 流(j=a,b,c);Ujc为CCSC输出的三相电压。
基于半桥MMC的自适应控制器在故障工况下快速降低直流电压参考值和增大子模块电容电压参考值,从而在故障期间快速降低单相实际投入的子模块个数,抑制直流侧故障电流的快速上升。自适应控制器具有一定的工程实用性,通过控制层面的改进,降低了对故障保护设备的硬件需求,相比改进拓扑,其实用性更强,并且对不同的换流站拓扑和不同类型的控制策略具有较好的适应性。
1.2 直流限流控制环节
在直流限流控制环节,将直流电流参考值Idcref与测量值Idcm的偏差输入比例-积分(proportionalintegral,PI)控制器,得到直流电压的偏差量,从而对直流电压的参考值Udcref进行重构得到直流电压的重构值Udcset。
稳态工况下,由于Idcref和Idcm间无偏差,Udcset=Udcref。故 障 工 况 下,由 于Idcm>Idcref,使 得Udcset<Udcref。其中,Idcref可由Psref与Udcref的比值得到。引入直流电压重构比Kudc来反映Udcset和Udcref的变化关系,其定义见式(2):

为使此控制器在稳态工况不对系统产生影响,而故障态工况能最大限度地进行限流操作,需要对其直流电压重构比进行限幅,范围为[Kudcmin,Kudcmax],本文设定为[0,1]。则不同工况下Kudc的取值见式(3):
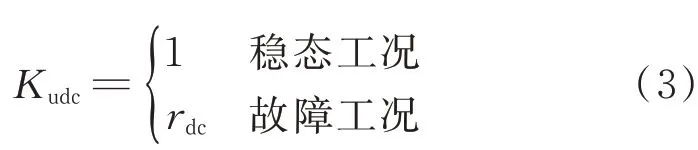
式中:rdc为故障工况下Kudc的值,rdc<1。从式(3)可看出,此控制器可在MMC换流器稳态工况下即可投入,稳态运 行下Kudc=1,故障工况下Kudc快速降低,使直流电压快速重构到远小于额定值的新值,可快速减少桥臂投入子模块个数。
1.3 子模块电容电压控制环节
子模块电容电压控制环节将MMC桥臂子模块电容电压的参考值ucref与测量值ucavg相减,输入PI控制器,得到子模块电容电压的偏差量,从而对子模块电容电压的参考值ucref进行重构,得到子模块电容电压的重构值ucset。
稳态工况下,由于ucref与ucavg间无偏差,ucset=ucref。故障工况下,由于子模块电容的放电,导致ucref>ucavg,使得ucset>ucref。其中ucref可由Udcref与桥臂子模块总数N的比值得到。引入子模块电容电压重构比Kuc反映ucset和ucref的变化关系,其定义见式(4):

同理,对子模块电容电压重构比Kuc进行限幅,范围为[Kucmin,Kucmax],本文设定为[0.5,1.5]。不同工况下Kuc的取值见式(5):

式中:rc为故障工况下Kuc的值,rc>1。从式(5)可看出,此控制器亦可在MMC正常运行时投入,正常运行下Kuc=1,故障工况下Kuc会快速增大,使子模块电容电压参考值快速重构到高于额定值的新值,亦可快速减少桥臂投入子模块个数。
1.4 自适应控制器双环的联合应用
本文提出的适用于MMC故障限流的自适应控制器中的2个控制环可同时在系统稳态工况下投入,在故障发生时Kudc和Kuc同时变化,对直流侧故障限流有叠加效果。将式(2)和式(4)代入式(1),可得投入双适应型控制器时的重构后单相投入子模块个数Nset。

由式(6)可知,在故障发生后,单相投入的子模块个数快速从N降到了Nset,自适应控制器对故障限流具有叠加效果。此外,由于系统故障时,MMC桥臂子模块电容电压释放的能量明显降低,加上子模块电容电压控制环节的作用,可明显加快故障清除后系统的恢复速度。
投入自适应控制器后,直流故障限流特性如图2所示。
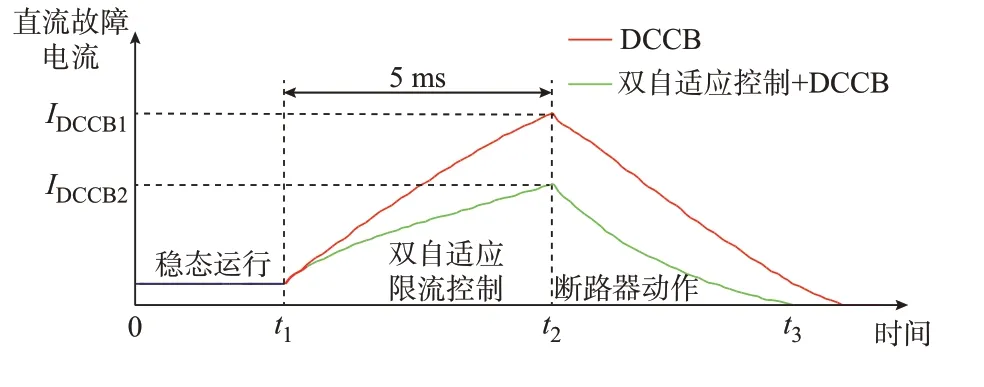
图2 直流故障电流波形Fig.2 Waveform of DC fault current
图2中,系统在0~t1时段处于稳态,此时自适应控制器已投入并工作在正常状态。在t1时刻系统直流侧发生极对回线短路故障。t1~t2时段,为系统故障检测和断路器动作过程(5 ms)[20]。此时,自适应限流控制的2个环节自动处于重构状态进行直流故障限流,通过快速减少投入的子模块个数,使DCCB的开断电流由IDCCB1降低为IDCCB2。t2时刻,断路器成功开断,直流故障电流逐渐减小为0。
2 自适应限流控制器对半桥MMC故障电流的作用机理分析
本章主要分析自适应控制器的投入对故障工况下半桥MMC桥臂电流和直流电流的作用机理,并针对单端半桥MMC进行理论分析与仿真的对比。
MMC故障初期等效电路见附录A图A1,半桥MMC在故障发生初期等效电路如附录A图A1(a)所示。为方便分析和计算,将等效电路分为2部分:直流侧部分(见附录A图A1(b))和交流侧部分(见附录A图A1(c))。
2.1 计及自适应控制的MMC直流侧故障电流的计算方法
MMC直流故障等效电路如附录A图A1(b)所示,为直流电源激励下的一阶RL电路,可得:

式中:Leqdc为直流故障电路的等值电感之和;idc为直流故障电流;Udc为直流电压;Reqdc为直流故障电路的等值电阻之和。
Leqdc和Reqdc可由式(8)得出:
式 中:Larm为MMC桥 臂 电 抗;Ldc为 直 流 侧 电 抗;Rarm为 桥臂电阻;Rdc为直流侧 电阻;Rf为直流侧故障等效电阻。
则直流故障电流idc可表达为:
式中:τ为一阶RL电路的时间常数;t0为故障发生时刻;Idc为系统发生直流故障前的稳态电流。
计及自适应控制器后,结合式(6)和式(9),直流侧故障电流i′dc的可表示为:

从式(10)看出,通过对MMC故障时的直流电压进行重构,可有效降低直流故障电流。
2.2 计及自适应控制的MMC桥臂电流的计算方法
MMC的交流侧部分等效电路如附录A图A1所示,其中Leqac和Reqac分别为交流等效电路的等效电感和等效电阻,其值可由式(11)得出:
式中:Rac和Lac分别为交流系统等效电阻和等效电感。
整个交流系统的等效电路实则为交流电源激励下的一阶RL电路。公共连接点交流电压uacj和MMC调制波电压umj可由式(12)表示:

式中:Uacj为uacj的相幅值;Umj为umj的相幅值;φj为移相角。
则故障下的稳态交流电流iacj+可表示为:

式(13)中:
自适应控制器通过影响桥臂投入子模块个数对MMC调制波umj产生影响,计及自适应控制器的调制波umj的表达式(调制波幅值快速降低到非常小的值,其幅值主要受Kudc/Kuc的影响)如式(16)所示:

计及自适应控制器后的故障下稳态交流电流iacj+的幅值和初相角γj的表达式可分别表示为:
则MMC交流电流的表达式为:

式中:iacj-为MMC发生故障前的稳态交流电流;τac=Leqac/Reqac为故障后交流等效系统的时间常数;t0为故障发生时刻。
故障下MMC桥臂电流iarmpj(以A相上桥臂为例)可由式(20)计算得出:

式 中:iaca为A相 交 流 电 流;idc为 直 流 故 障 电 流。自适应控制器通过影响MMC交直流侧故障电流,对故障下MMC桥臂电流进行优化。
2.3 计及自适应控制的半桥MMC故障电流计算方法的单端仿真验证
为验证计及自适应控制的半桥MMC直流故障电流和桥臂电流公式推导的正确性,对单端MMC进行仿真验证,具体仿真参数参考附录B表B1,直流侧双极故障发生在MMC1直流侧出口处。直流侧电感Ldc=0.1 H,交流系统等效电感Lac=0.043 9 H,直流线路电阻Rdc=1Ω,桥臂电阻Rarm=2Ω,交流侧等效电阻Rac=0.137Ω,直流侧短路等效电阻Rf=0.01Ω,直流限流控制环节的PI比例系数KPIdc=14,PI积分系数KIIdc=10-6,子模块电容电压控制环节的PI比例系数KPuc=2,PI积分系数KIuc=0.008。
为更好地进行理论计算值和仿真值比对,在理论计算环节中令故障工况下Kudc/Kuc=0(自适应控制器可使MMC单相投入子模块快速降低到接近于0的数值)。系统在稳态期间投入自适应限流控制器,在1.5 s时在直流侧发生双极短路故障,则在故障期间(1.5~1.54 s)关键测点参数的理论计算与仿真的对比见附录A图A2。从图A2可以看出,在故障发生后,自适应控制器可迅速抑制故障电流的上升,故障电流的仿真值和计算值可很好地吻合,验证了MMC直流侧故障电流和桥臂故障电流公式的正确性。
自适应控制器在故障清除的过程中,起主要作用的是直流限流控制器环节。在此环节中,积分器的调节作用无法进行精确数学描述。可令直流限流控制器环节中的积分系数为0,只保留比例环节对MMC桥臂故障电流和直流故障电流的计算式,进行进一步的验证。此种工况下重构后的直流电压可由式(21)表示:

式中:Kp为比例控制器的比例系数,取值为260。
用式(21)中的Udcset代替式(7)中的Udc,得到此工况下故障电流:

式中:τdc1为此工况下的时间常数,具体计算式见表达式(23)。
式(22)中其余参数含义与式(7)一致。此工况下交流电流和桥臂电流的计算式与式(13)—式(20)一致。
在此工况下,故障期间(1.5~1.54 s)关键测点参数的理论计算与仿真的对比如附录A图A3所示。从图中可看出,在只考虑Kp时,故障电流的仿真值和计算值依然可良好地吻合,进一步验证了MMC直流侧故障电流和桥臂故障电流公式的通用性。
3 自适应控制器在柔性直流电网中的应用分析
在基于半桥MMC的四端柔直电网工程模型(见附录A图A4)中验证自适应控制器在柔性直流电网的有效性,其中直流侧平波电抗器的值为0.1 H,直流电网中各个换流器的参数详见附表B表B1。
3.1 自适应控制器故障限流的仿真验证
系统仿真设定1.5 s时在直流侧线路Line14的MMC1直流侧出口处发生直流侧永久性双极短路故障(暂时性故障[21]和永久性故障的仿真波形差异不大),则需要断开与Line14相连的断路器(CB14和CB41),清除直流故障(假定故障检测时间为3 ms,断路器的开断时间是2 ms)。自适应控制对流过相应DCCB的故障电流及避雷器耗散能量的影响如图3所示。
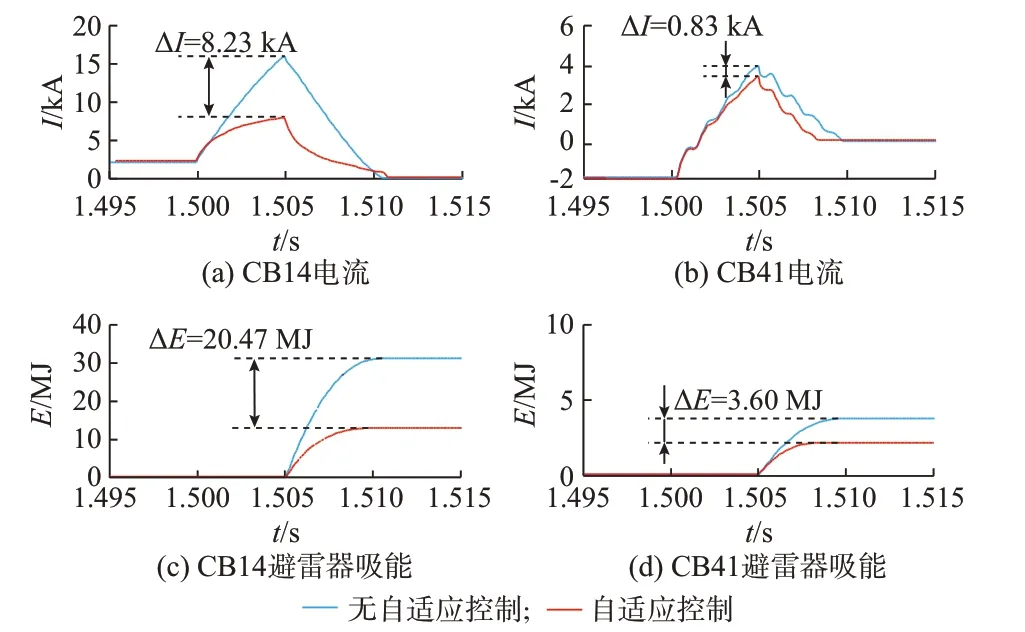
图3 自适应控制对故障电流和避雷器吸能的影响Fig.3 Influence of adaptive control on fault current and energy absorption of arrester
图3中,I和ΔI分别为电流及电流的变化量;E和ΔE分别为能量及能量的变化量。从图中可看出,由于故障在MMC1直流侧出口处,因此自适应控制器对直流断路器CB14的相关参数影响明显,可使直流断路器CB14的开断电流降低8.23 kA,相应的避雷器可减少20.47 MJ的能量吸收。而MMC2由于距故障点较远,自适应控制器可使断路器CB41的开断电流减少0.83 kA,相应的避雷器可减少3.6 MJ的能量吸收。断路器的性能指标需满足最恶劣的情况(MMC1出口处故障对于CB14最恶劣),因此从CB14的数据比对可以看出,自适应控制可有效降低DCCB的开断电流和避雷器吸收的能量。
自适应控制对MMC1的直流侧电压的影响如附录A图A5所示。从图中可以看出,自适应控制器稳态工况下不影响MMC直流电压,故障工况下会通过减小MMC单相投入子模块个数,降低MMC直流电压,从而减少故障电流。在投入自适应控制器系统恢复过程中,MMC1侧的直流电压波动变大,其峰值相对于无控制时增加82 kV,这是由于子模块电容电压环节为使系统加快恢复带来了高的振荡量,但仍在运行可接受的范围之内。此外,还需观察桥臂电流的波形,确保换流器不会因为桥臂电流过流闭锁,自适应控制对桥臂电流的影响如附录A图A6所示。图中的仿真波形显示在投入自适应控制器后,MMC1六桥臂故障电流的波动范围从-5.34~2.20 kA变化为-5.43~3.88 kA,波动范围有所增加,但仍在合理范围内,说明在自适应控制器投入之后,故障工况下不会造成换流器因为桥臂过流而闭锁。
3.2 自适应控制器加快系统恢复的仿真验证
自适应控制器在故障工程中可有效降低MMC子模块电容电压的放电量,再加上子模块电容电压控制环节的作用,可明显加快故障清除后系统的恢复速度。为验证自适应控制器加快系统恢复的特性,截取MMC1和MMC4桥臂子模块电容电压波形(A相上桥臂)进行比对,系统恢复稳定的判据为电压波动范围小于稳定值的±5%,仿真波形图见图4。
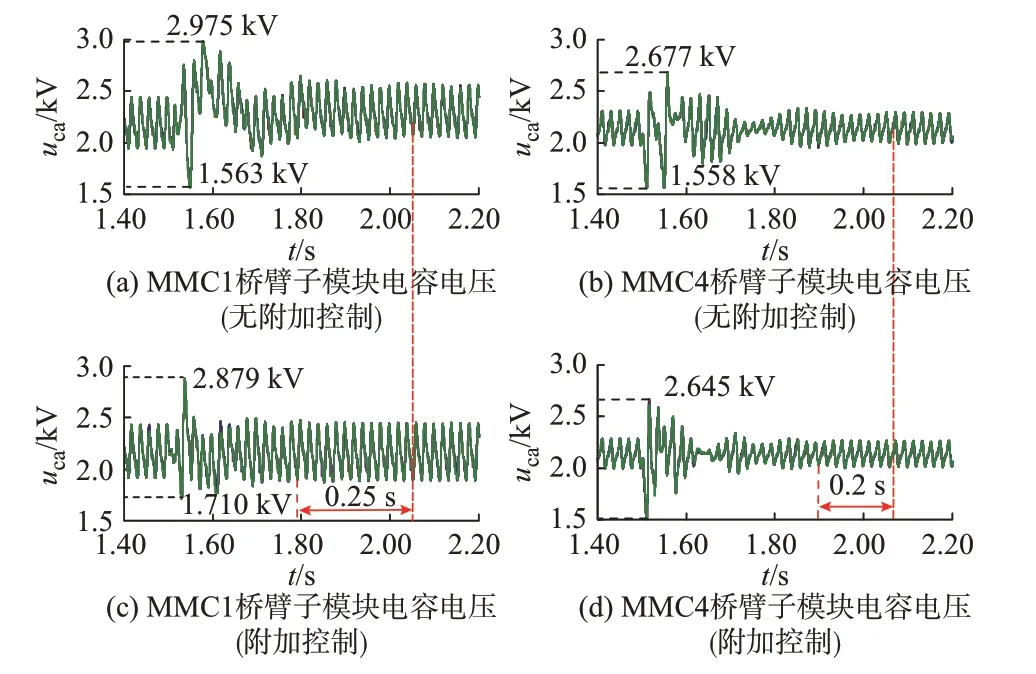
图4 自适应控制对系统恢复时间的影响Fig.4 Influence of adaptive control on system recovery time
图4中,uca为MMC中A相 上 桥 臂子模块电 容电压值。从图中可得出,在投入自适应控制器后,MMC1和MMC4的桥臂子模块电容电压波动明显减小,在断路器动作后系统恢复过程中,换流站的子模块电容电压均可快速恢复到故障发生前的数值,但由于故障点与不同换流站的距离不同,导致自适应控制器的整定时间不同,整体上可加快系统的恢复时间达0.2 s以上。系统的快速恢复主要是自适应控制器中的定子模块电容电压环节的作用。故障后系统恢复至新的稳态时,MMC1的桥臂子模块电容电压波动有所增加,其原因是系统将线路Line14切除,导致系统的潮流重新分配,线路的损耗有所增加,各个换流器发出的功率增加。此外,投入自适应控制器后,系统在故障前后均能稳定运行,从侧面说明,子模块电容电压重构控制器对MMC电容电压的均衡控制影响不大。
直流电网中各个换流站直流侧出口潮流分布如附录A图A7所示,图A7(a)—(d)为直流电网各个换流站直流侧出口的有功功率,整体上看,投入自适应控制器后,各个换流站出口潮流的超调量明显降低,直流电网系统潮流的恢复明显加快。以恢复时间最长的MMC4为例,可加快系统恢复0.2 s。
为更好地分析自适应控制器运行过程,截取MMC1中一次系统(物理量)和二次系统(信号量)中关键测点波形如附录A图A8所示。系统发生故障后,MMC直流电压瞬间跌落,但子模块电容电压在缓慢降低,直流电流上升速度缓慢,峰值缓慢增加。故障线路切除后,MMC直流电压和子模块电容电压平均值可快速恢复。故障线路由于被切除,故障线路电流为0。
为更加方便地分析自适应控制器在故障发生前后的动作,特将整个过程分为稳态、故障、恢复3个部分。由图A8(b)中可看出,稳态下系统正常运行,所有控制的输出都维持常数值。当系统发生故障后,直流限流控制环节的输出值快速降低,子模块电容电压控制环节的输出值增加,其综合结果令MMC单相投入的子模块个数快速减小,达到故障限流的目的。在系统恢复阶段,直流限流控制环节的输出值增加,子模块电容电压控制环节的输出值减小,其综合结果令MMC单相投入的子模块个数增加,子模块电容快速充电,整个系统快速恢复达到新的稳态。
4 结语
为降低半桥MMC柔直电网中断路器的造价和占地面积,本文从控制的角度出发,提出了一种自适应限流控制器,得到以下结论。
1)自适应控制器在整个系统正常运行后投入运行即可,其在故障清除前后无须人为控制,可通过故障期间重构MMC直流电压和子模块电容电压参考值自适应配合DCCB清除故障,加快系统恢复。
2)自适应控制器可有效降低DCCB清除故障时的开断电流,明显减少避雷器吸收的耗散能量。
3)在故障后系统重启过程中,自适应控制器中的定子模块电容电压控制环节可有效减少桥臂子模块电容电压值的波动和直流电网中潮流的超调,并加快系统的恢复。
本文所提方法的工程实用性以及对MMC交流故障穿越策略的影响暂未考虑,后续将开展相关研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。