电动半挂汽车列车能量回收型缓速器匹配控制
2021-09-09聂孟稳杨坤王杰马超肖锦钊谭树梁
聂孟稳 杨坤 王杰 马超 肖锦钊 谭树梁


摘 要:為解决缓速器安装于半挂汽车列车传动系统时存在“冲撞”严重的问题,提高缓速工况时制动能量的回收率,提出了一种安装于半挂车前轴两侧轮毂内的能量回收型缓速器方案。根据GB/T 32692-2016中对缓速制动性能的规定,对缓速器参数进行了匹配,制定相应的缓速器控制策略,根据控制策略中对电动半挂汽车列车质量的需求,对质量估计算法进行研究,并基于粒子群算法对小制动强度时制动力矩分配进行探讨。通过Matlab/Simulink与TruckSim搭建了联合仿真平台,对质量估计算法、电动半挂汽车列车经济性和制动安全性进行仿真验证。仿真结果表明:质量估计算法能够准确估计电动半挂汽车列车质量;能量回收型缓速器能够满足电动半挂汽车列车缓速需求,提高制动能量回收率,且能够有效解决电动半挂汽车列车缓速制动时的“冲撞”问题。相关研究能够解决“冲撞”问题,提高制动安全性,为提高电动半挂汽车列车缓速制动时制动能量的回收率提供了新思路。
关键词:车辆工程;电动半挂汽车列车;能量回收型缓速器;控制策略;质量估计;粒子群算法
中图分类号:U469.5 文献标识码:A
doi:10.7535/hbkd.2021yx04003
收稿日期:2021-03-30;修回日期:2021-05-25;责任编辑:冯 民
基金项目:国家自然科学基金(51605265);山东省重点研发计划项目(2018GGX105010)
第一作者简介:聂孟稳(1997—),男,山东菏泽人,硕士研究生,主要从事新能源汽车关键技术方面的研究。
通讯作者:杨 坤副教授。E-mail:yangkun_sdut@163.com
聂孟稳,杨坤,王杰,等.电动半挂汽车列车能量回收型缓速器匹配控制[J].河北科技大学学报,2021,42(4):334-344.NIE Mengwen, YANG Kun, WANG Jie, et al.Matching control of energy recovery retarder for electric semi-trailer train[J].Journal of Hebei University of Science and Technology,2021,42(4):334-344.
Matching control of energy recovery retarder for electric semi-trailer train
NIE Mengwen1,YANG Kun1,2,WANG Jie1,MA Chao1,XIAO Jinzhao1,TAN Shuliang3
(1.School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo,Shandong 255000,China;2.Electric Control Department of Shandong Yiwei Automobile Technology Company Limited,Zibo,Shandong 255130,China;3.Medium Heavy Vehicle Development Department 1,FAW Jiefang Automotive Company Limited Commercial Vehicle Development Institute,Changchun,Jilin 130011,China)
Abstract:In order to improve the serious problem of "collision" when the retarder is installed in the transmission system of a semi-trailer vehicle,and to improve the braking energy recovery rate during retarding conditions,a scheme of energy recovery type retarder installed in the hub on both sides of the front axle of semi-trailer was proposed.According to the regulation of retarder braking performance in GB/T 32692-2016,the retarder parameters were matched,and the corresponding retarder control strategy was proposed.According to the quality requirements of the electric semitrailer train in the control strategy,the quality estimation algorithm was studied,and based on the particle swarm algorithm,the braking torque distribution at low braking intensity was studied.A joint simulation platform was built through Matlab/Simulink and TruckSim to simulate and verify the quality estimation algorithm,the economy of electric semitrailer trains and braking safety.The simulation results show that the quality estimation algorithm can accurately estimate the quality of electric semitrailer trains; the energy recovery retarder can meet the retardation requirements of electric semi-trailer vehicles,improve the braking energy recovery rate,and can effectively improve the "collision" problem of the electric semi-trailer train during slow braking.Related research provides new ideas for improving the braking energy recovery rate of electric semi-trailer vehicles during slow braking,and can improve the "collision" problem and improve braking safety.
Keywords:
vehicle engineering;electric semi-trailer train;energy recovery retarder;control strategy;quality estimation;particle swarm optimization
半挂汽车列车能够有效提高物流效率[1]。随着物流行业的快速发展,半挂汽车列车的数量不断增多,年行驶里程增加[2],提高其整车经济性,能够有效减少社会能源的消耗[3]。此外,半挂汽车列车制动安全性也应受到高度重视,2014—2016年,中国67.4%的重大交通事故与重型商用车有关,其中大部分和制动器的制动效能有关[4]。根据GB 7258-2017规定,总质量大于或等于12 000 kg的货车,必须装备缓速器或其他辅助制动装置[5],缓速器能够避免重载车辆长时间使用行车制动器时发生制动效能衰退的问题,提高制动安全性[1]。
傳统缓速器主要有液力缓速器、电涡流缓速器、自励式缓速器和永磁缓速器等[6],工作时其将动能转化为热能,造成了制动能量的损失。对缓速制动时能量进行回收利用,能够降低车辆能耗,提高整车经济性[7]。为对缓速制动时的能量进行回收,杨志远[8]提出了一种将电磁离合式发电机与电涡流缓速器并联安装在变速器输出轴处的能量回收式电涡流缓速器方案,在缓速制动时将制动能量转化为电能储存在储能系统,满足电涡流缓速器与车用电器的用电需求;针对燃油商用车,周泉[9]设计了一种由电涡流制动单元、再生制动单元和冷却单元等组成的能量回收式缓速装置,利用再生制动单元产生电能,满足电涡流制动单元用电需求,并为车载电器提供电能;GUO等[10]针对燃油商用车,基于电涡流缓速器原理和单相磁阻电机原理,设计了一种安装于变速器输出轴的电磁液冷能量回收式缓速器,将缓速制动时的部分能量转化为电能,满足电涡流缓速机构的用电需求。综上所述,燃油商用车电能储能系统容量较小,无法储存大量能量,相关研究主要基于电涡流缓速器原理对车辆进行缓速制动,并基于发电机原理对部分缓速制动能量进行回收,产生电能,满足电涡流缓速机构的用电需求;同时,相关研究中,能量回收式缓速器安装于传动系统,但对于半挂汽车列车,缓速器安装于牵引车传动系统时,会存在“冲撞”等严重问题。
电动半挂汽车列车电能储能系统容量大,能够储存更多制动回收的能量。本文针对电动半挂汽车列车,为解决“冲撞”严重问题,提高缓速制动时的能量回收率,基于发电机原理,考虑储能系统SOC的限制,提出一种能量回收型缓速器方案,并根据GB/T 32692-2016中对缓速制动性能的规定[11],对缓速器参数进行匹配,使其满足电动半挂汽车列车的缓速需求。同时提出相应的能量回收型缓速器控制策略,根据控制策略中对半挂汽车列车的质量需求,对整车质量估计算法进行研究,基于粒子群算法对小制动强度时制动力矩分配进行探讨。通过Matlab/Simulink与TruckSim搭建联合仿真平台,对质量估计算法、电动半挂汽车列车的经济性与制动安全性进行仿真验证。
1 能量回收型缓速器方案设计
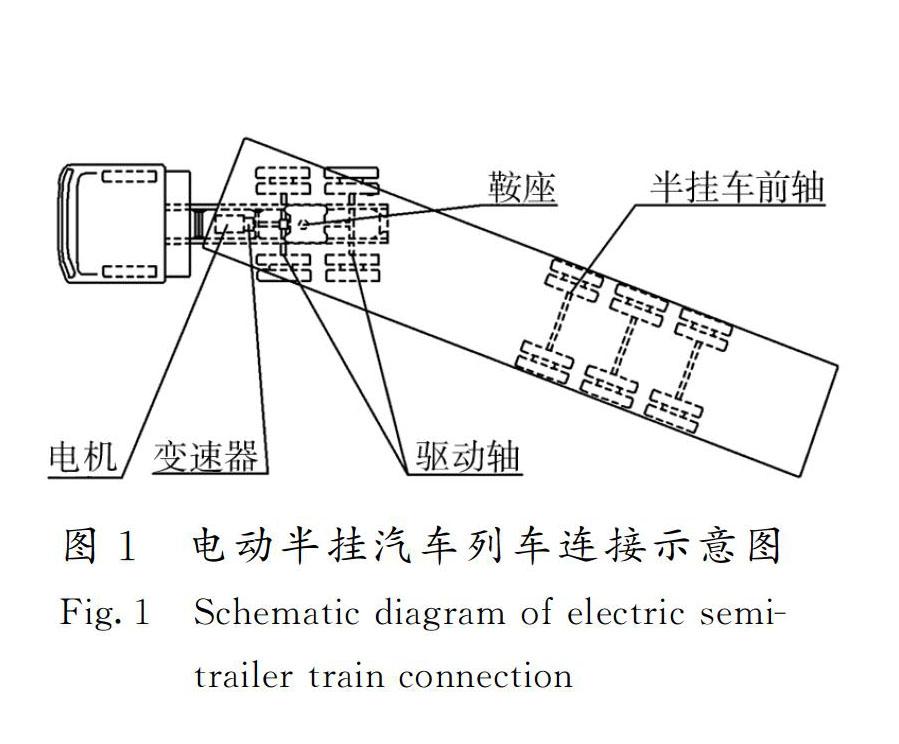
如图1所示,电动半挂汽车列车工作时牵引车通过鞍座与半挂车相连,缓速器安装于牵引车传动系统时,缓速器制动力矩通过传动系统作用于牵引车驱动轴,对牵引车制动。质量较大的半挂车无制动力,巨大的惯性使半挂车通过鞍座对牵引车产生“冲撞”,该冲撞力无法保证完全作用于半挂汽车列车的纵向平面内[1],冲撞力过大时将导致半挂汽车列车发生折叠,存在制动安全性问题。针对该问题,本文设计一种安装于半挂车前轴两侧轮毂内的能量回收型缓速器,在缓速制动时对半挂车制动,与半挂车相比,牵引车惯性较小,此时牵引车和半挂车之间相互作用力较小,能够提高缓速制动时的安全性。同时,能量回收型缓速器能够在缓速制动时将动能转化为电能进行回收,提高电动半挂汽车列车的经济性,当储能系统SOC不满足回收条件时,能够将制动能量转化为热能,保证缓速效果。
能量回收型缓速器原理如图2所示,由行星减速机构、鼓式制动机构、耗能盘和发电机构等组成。行星减速机构由行星架、行星齿轮、太阳轮和齿圈等组成,齿圈位于缓速器壳体上;鼓式制动机构由直线电机、制动蹄和电机底座等组成,电机底座与车轴固定连接;耗能盘与车轴固定连接;发电机构利用永磁发电机原理,由定子、转子和转子支撑架等组成,定子固定于壳体上,转子内嵌有永磁体,并安装于转子支撑架上,转子支撑架截面呈“工”字形,两侧空间安装其他机构,其中,行星减速机构的太阳轮与转子支撑架固定连接。
缓速制动时,定子绕组闭合,车轮带动行星架转动,并通过行星减速机构带动转子支撑架转动,固定于转子支撑架上的转子产生旋转磁场,定子绕组切割磁力线,将动能转化为电能,同时产生阻碍转子转动的阻力矩,通过行星减速机构传递至车轮,使车速降低,当储能系统SOC不满足回收条件时,耗能盘将无法回收的电能转化为热能;机械制动时,直线电机推动制动蹄与转子支撑架内侧制动鼓贴合,产生制动力矩,并通过行星减速机构传递至车轮,降低车速。
2 能量回收型缓速器参数匹配
本文以某6×4电动牵引车与半挂车组合而成的电动半挂汽车列车为目标车型对能量回收型缓速器参数进行参数匹配,目标车型整车参数和动力总成参数如表1所示。
基于缓速器制动性能试验规定[11],缓速器发电机构功率、最大制动力矩和基速应满足式(1)。
Pa≥Mg4 000ηp,
Tbmax≥1.27Mg-CDAu2tr42.3ipηp,
n≥30uti3.6πr,(1)
式中:Pa为缓速器发电机构功率;M为半挂汽车列车总质量;ηp为行星减速机构机械效率;Tbmax为缓速器发电机构最大制动力矩;CD为空气阻力系数;A为迎风面积;ut为缓速器制动性能试验中的规定车速;r为车轮滚动半径;ip为行星减速机构传动比,基于机械手册对行星减速机构公称传动比的规定[12],ip=6.3;n为缓速器发电机构基速。
基于式(1),并参考发电机技术条件的相关规定[13],确定缓速器发电机构参数如表2所示。
3 能量回收型缓速器控制研究
电动半挂汽车列车下长坡时,需要长时间对车辆进行制动,保持车速稳定,能量回收型缓速器不仅能够控制车速保持稳定,而且当电动半挂汽车列车进行制动、电机制动力矩无法满足制动需求时,能量回收型缓速器能提供制动力矩,并对制动动能进行回收,提高制动能量回收率和整车经济性。
3.1 能量回收型缓速器控制流程研究
能量回收型缓速器控制流程如图3所示,由于电动半挂汽车列车工作时载货量不同,质量变化较大,为对制动力矩进行精确控制,需要对半挂汽车列车质量进行估计。当缓速器开关开启时,判断制动踏板是否被踩下,当制动踏板压力>0时,对制动强度zdem进行计算。当zdem>0.6时属于紧急制动,应采用机械制动以提高制动安全性;另外,当u≤10 km/h時,由于此时制动能量回收效率过低,因此采用机械制动。当zdem≤0.6,u>10 km/h时,利用缓速器、电机和机械制动系统联合制动,并对制动能量进行回收,基于GB 12676-2014中对各轴制动力矩分配的规定[14],根据zdem是否大于0.15,将联合制动分为小强度制动和中强度制动;当制动踏板压力=0时,利用缓速器维持车辆保持匀速。图3中,zdem为需求制动强度;u为行驶车速;SOC为储能系统荷电状态。
3.2 半挂汽车列车质量估计研究
以半挂汽车列车质量作为未知参数,对模型中未知参数进行辨识的方法主要有递推最小二乘法、概率密度逼近参数估计法等,其中,递推最小二乘法具有原理简单、收敛速度快的优点[15]。本文基于电动半挂汽车列车纵向动力学模型,采用递推最小二乘法对电动半挂汽车列车质量进行估计。
电动半挂汽车列车纵向动力学模型如式(2)所示。
sTtigi0ηtr+1-sTbr-CDAu221.15=Mactgfcosα+Mactgsinα+δMactdudt,(2)
式中:s为行驶状态,s=1代表驱动状态,s=0代表制动状态;Tt为电机驱动转矩;ig为变速器传动比;i0为主减速器传动比;ηt为传动系统机械效率;Tb为制动力矩;Mact为电动半挂汽车列车质量;f为滚动阻力系数;α为道路坡度角;δ为电动半挂汽车列车旋转质量换算系数;其他符号同上。
由式(2)可知,道路坡度与电动半挂汽车列车质量之间存在参数耦合,为对半挂汽车列车质量进行估计,需要对两者进行解耦。将式(2)整理为式(3)可知,通过利用微电子机械系统加速度传感器采集纵向加速度axsen[16],并求得垂向加速度az的方式,可实现两参数解耦。
sTtigi0ηtr+1-sTbr-CDAu221.15=Mactgsinα+dudt-dudt+gfcosα+δdudt=Mactaxsen+azf+δ-1dudt,
(3)
式中:axsen=gsinα+dudt;az=gcosα。
基于递推最小二乘法原理和式(3),令So和Sc如式(4)所示。
So=sTtigi0ηtr+1-sTbr-CDAu221.15,
Sc=azf+ax+δ-1dudt,
So=[s0],
Sc=[sc],(4)
式中:So为实际系统输出矩阵;Sc为观测矩阵;其他符号同上。
每更新一次观测数据,电动半挂汽车列车质量估计模型根据实际系统输出量与观测数据计算得到的输出量之间的偏差,对质量估计值不断修正,从而改善估计精度,获得较好的估计值。基于对道路坡度和半挂汽车列车质量的解耦,电动半挂汽车列车质量估计模型如式5所示。
M^actk=[m^actk],
M^actk=M^actk-1+Gk[Sok-SckM^actk-1],
Gk=Pk-1SckTλ+SckPk-1SckT,
Pk=[I-GkSck]Pk-1λ,(5)
式中:m^actk为半挂汽车列车估计质量;M^act(k)为质量估计矩阵;G(k)为系统增益矩阵;P(k)为系统协方差矩阵;k为迭代次数,k=1,2,…;I为单位矩阵;SymbollA@为遗忘因子,SymbollA@=0.95,其他符号同上。
3.3 匀速行驶与小强度制动控制研究
根据GB 12676-2014规定,当zdem>0.15,2轴以上车辆制动时,至少1根前轴利用附着系数大于至少1根后轴利用附着系数[14],此时,电动半挂汽车列车各轴制动力矩按理想制动力分配曲线进行分配,可回收的制动能量最多[17],由再生制动力矩优先提供各轴需求制动力矩时,可提高制动能量回收率;而当zdem≤0.15时,法规对电动半挂汽车列车轴间制动力矩分配没有限制,同时,根据中国各级公路最大纵坡的规定[18],电动半挂汽车列车行驶道路坡度不大于7%,即下坡时制动强度不大于0.07,为提高制动能量回收率,并保证制动安全性,本文对匀速行驶控制策略和小强度制动控制策略进行研究。
3.3.1 匀速行驶控制策略
匀速行驶控制策略流程如图4所示,根据缓速制动性能试验工况[11],将目标车速定为30 km/h,当u>30 km/h时,通过联合制动将车速降低至30 km/h,并利用加速度传感器采集axzen信号,计算出垂向加速度az和需求制动力矩Tdem,对需求制动力矩进行分配。当SOC<90%时,回收产生的电能,对储能系统充电,否则,利用耗能盘将电能转化为热能,保证缓速效果。图4中:Tdem为电动半挂汽车列车需求制动力矩;Tbr为缓速器制动力矩,其他符号同上。
3.3.2 小强度制动控制策略
小强度制动控制策略如图5所示,根据质量估计结果和需求制动强度对需求制动力矩进行计算,并基于粒子群优化算法和离线优化结果对制动力矩进行分配,当SOC<90%时,回收产生的电能,对储能系统充电,否则,利用耗能盘将电能转化为热能。
粒子群优化算法以再生制动功率最大为优化目标,以Fhsc为约束,对缓速器制动力矩、电机制动力矩和机械制动力矩进行分配。其中,Fhsc=min[Fhsr,Fhsm],Fhsr为缓速器优先提供制动力矩时牵引车与半挂车之间的冲撞力,Fhsm为电机优先提供制动力矩时的冲撞力,冲撞力计算如式(6)所示。
Fhs=mtms+mtFfs+Tbsr-msms+mtFft+Tbtr,(6)
式中:mt为牵引车质量;ms为半挂车质量;Ffs为半挂车滚动阻力;Tbs为半挂车制动力矩;Fft为牵引车滚动阻力;Tbt为牵引车制动力矩;其他符号同上。
首先,对粒子群进行初始化,如图6所示,根据车速u计算缓速器和电机转速nr和nm,得到该转速下缓速器和电机可提供的最大制动力矩Tbrmax和Tbmmax;设置粒子群迭代次数和规模,并对粒子速度v和位置k1,k2进行初始化,其中,k1和k2分别为缓速器和电机制动力矩系数,k1,k2∈[0,1]。
根据式(7)计算w粒子的适应度Pwbr,即再生制动功率,Pwbr计算流程如图7所示。当Pwbr大于最大允许充电功率Pcmax或冲撞力Fhs大于Fhsc时,令Pwbr=0;当粒子数目达到规模W时,初始化完成。
Pbr=Tbruipηr1 800.18r+Tbmuigi0ηm3 600.35r,(7)
式中:Tm为电机制动力矩;其他符号同上。
粒子群初始化后,对粒子群进行迭代更新,如图8所示。基于初始粒子群,寻找个体最优Pibr与全局最优Pgbr,即各粒子最大制动功率与粒子群全局最大制动功率,并更新各粒子速度和位置,更新规则如式(8)所示。同时,计算适应度Pwbr,并对Pibr与Pgbr进行更新,当粒子群迭代次数达到M,完成迭代,输出全局最优Pgbr及对应的缓速器和电机制动力矩Tbr和Tbm。
vw(m+1)=cvw(m)+c1r1[pw(m)-xw(m)]+c2r2[pg,w(m)-xw(m)],xw(m+1)=xw(m)+vw(m+1),w=1,2,…,W,m=0,1,…M。(8)
式中:c为权重因子;c1为个体学习因子;c2为全局学习因子;xw为粒子位置,xw=[k1w,k2w];r1,r2为随机数,r1,r2∈[0,1];Pw为粒子个体最优位置;Pg,w为全局最优位置;vw为粒子速度。
满载工况下,u=50 km/h,Tdem=15 000 N·m时,全局最优Pgbr迭代曲线如图9所示,在迭代14次后,Pgbr达到最优值。基于粒子群优化算法,令迭代次数为50,对不同负载、不同车速下制动力矩分配进行离线优化,并基于优化结果,对制动力矩进行分配,其中,满载工况下,u=50 km/h时,制动力矩分配如图10所示,当缓速器和电机再生制动力矩满足需求制动力矩时,再生制动功率Pgbr整体呈线性增長。由此可知,粒子群优化算法可用于制动力矩分配。
4 电动半挂汽车列车仿真验证
通过对能量回收型缓速器的匹配与控制研究,基于表1参数,利用Matlab/Simulink与TruckSim搭建联合仿真平台,对质量估计算法、电动半挂汽车列车经济性和制动安全性进行仿真验证。联合仿真平台原理如图11所示,在Simulink中搭建电机模块、能量回收型缓速器模块、机械制动模块和质量估计模块等,通过TruckSim的输入端口和输出端口实现联合仿真平台信号传递。
4.1 质量估计算法验证
基于缓速器制动性能试验工况[11],对质量估计算法的准确性进行验证,结果如表3和图12所示。在空载和满载时,质量估计算法误差分别为0.129%和0.151%,误差较小,即质量估计算法能够准确估计电动半挂汽车列车质量。
4.2 经济性验证
基于缓速制动性能试验工况[11]与中国重型商用车瞬态循环工况[19](China-world transient vehicle cycle,C-WTVC)对电动半挂汽车列车经济性进行验证,并在C-WTVC工况中,对有无安装能量回收型缓速器的电动半挂汽车列车的经济性进行仿真对比分析,其中,电动半挂汽车列车储能系统能量为290.61 kW·h,初始SOC为80%。
如图13所示,缓速制动性能试验工况[11]下,电动半挂牵引车在坡度为7%的道路上,行驶6 km,SOC增加4.27%,即回收能量12.41 kW·h。
基于GB/T 27840-2011规定[19],C-WTVC工况下,半挂汽车列车100 km消耗能量如表4所示。当半挂汽车列车载荷较大时,能量回收型缓速器能够有效提高电动半挂汽车列车制动能量回收率,考虑到半挂汽车列车通常载荷较大[1],以满载工况为例,车速曲线、SOC变化曲线和机械制动力矩如图14所示。由图14可知,实际车速能够精确跟踪目标速度,说明控制策略能够满足驾驶员需求。在高速制动时,无能量回收型缓速器时,再生制动力矩无法满足制动需求,需要机械制动力矩提供需求制动力矩,造成部分制动能量未能回收;有能量回收型缓速器时,再生制动力矩满足制动需求,不需要提供机械制动力矩,增加了制动能量回收率。电动半挂汽车列车作为商用车,年行驶里程约为105 600 km[2],满载工况下,安装能量回收型缓速器的电动半挂汽车列车每年能够节省能量1 024.32 kW·h。
4.3 制动安全性验证
缓速器经常在下长坡时工作,由于中国长坡路况常伴随弯道[20],基于缓速器制动性能试验规定,建立了缓速器制动安全性测试工况:在TruckSim中建立坡度为7%、路面附着系数为0.85、横向位置与纵向位置如图15所示的坡道,初始车速和目标车速为30 km/h。仅采用缓速器进行制动,车速变化如图16所示,实际车速在30 km/h左右,缓速器能够满足缓速制动需求。
冲撞力绝对值越大,“冲撞”越严重。如图17 a)所示,空载时,缓速器安装于牵引车与半挂车,“冲撞”程度相似;如图17 b)和图17 c)所示,半载和满载时,缓速器安装于半挂车,冲撞力绝对值分别降低69.7%和88.2%。因此,缓速器安装于半挂车能够有效降低负载时牵引车与半挂车之间的“冲撞”,提高制动安全性。
5 结 语
缓速器安装于半挂汽车列车传动系统时存在“冲撞”严重的问题,为提高缓速制动的安全性及缓速制动时的能量回收率,本文对能量回收型缓速器进行了研究。
1)考虑储能单元SOC的限制,提出了一种安装于半挂车前轴两侧轮毂内的能量回收型缓速器方案,根据GB/T 32692-2016中对缓速制动性能的规定,对缓速器参数进行了匹配,提出了相应的缓速器控制策略,根据控制策略中对电动半挂汽车列车质量的需求,对质量估计算法进行了研究,并基于粒子群算法对小制动强度时制动力矩分配进行了研究。
2)基于Matlab/Simulink与TruckSim搭建了联合仿真平台,对质量估计算法、电动半挂汽车列车的经济性和制动安全性进行了仿真验证。仿真结果表明:质量估计算法能够准确估计电动半挂汽车列车质量;能量回收型缓速器能够满足缓速需求,在缓速性能测试工况中回收能量12.41 kW·h,且能够提高C-WTVC工况下电动半挂汽车列车的制动能量回收率,从而提高了整车经济性;同时,与安装于牵引车的情况相比,缓速器安装于半挂车时,可有效降低负载时牵引车与半挂车之间的“冲撞”。能量回收型缓速器能够提高电动半挂汽车列车制动能量回收率,降低制动时“冲撞”,提高制动安全性。
车速信号波动较大时会影响质量估计算法的结果。本文未对车速信号进行处理,在未来研究中应针对问题特性设计滤波算法,消除车速信号的剧烈波动,减小车速信号波动的影响。此外,还需进一步对缓速器的结构和尺寸参数进行设计,为能量回收型缓速器得到更广泛应用提供参考。
参考文献/References:
[1] 何仁,申小敏.半挂汽车列车联合制动系统性能仿真分析[J].重庆交通大学学报(自然科学版),2016,35(5):165-173.
HE Ren,SHEN Xiaomin.Performance simulation and analysis of the united braking system of tractor semi-trailer[J].Journal of Chongqing Jiaotong University(Natural Sciences),2016,35(5):165-173.
[2] 李珂,王燕军,王涛,等.乌鲁木齐市机动车排放清单研究[J].环境科学研究,2010,23(4):407-412.
LI Ke,WANG Yanjun,WANG Tao,et al.Vehicle pollution emission inventory research in Urumqi city[J].Research of Environmental Sciences,2010,23(4):407-412.
[3] BARAL N R,ASHER Z,TRINKO D,et al.Biomass feedstock transport using fuel cell and battery electric trucks improves lifecycle metrics of biofuel sustainability and economy[J].Journal of Cleaner Production,2021,279:123593.
[4] 谷亞蒙.半挂汽车列车折叠失稳状态仿真系统开发研究[D].西安:长安大学,2019.
GU Yameng.Development Study on Jackknifing Simulation System of Tractor-semitrailer[D].Xi′an:Chang′an University,2019.
[5] GB 7258—2017,机动车运行安全技术条件[S].
[6] 叶乐志.汽车永磁缓速器设计理论与试验研究[D].北京:北京工业大学,2012.
YE Lezhi.Design Theoreticaland Experimental Study on Permanent Magnet Retarder for Vehicle[D].Beijing:Beijing University of Technology,2012.
[7] SICILIA M,SIMONE M C.Development of an energy recovery device based on the dynamics of a semi-trailer[C]//Advances in Design,Simulation and Manufacturing III.DSMIE 2020.Lecture Notes in Mechanical Engineering.Cham:Springer,2020:74-84.
[8] 杨志远.能量回收式电涡流缓速器设计研究[D].南京:南京理工大学,2006.
YANG Zhiyuan.Design and Research of Energy Recovery Eddy Current Retarder[D].Nanjing:Nanjing University of Science and Technology,2006.
[9] 周泉.汽车制动能量回收式缓速装置研究[D].武汉:武汉理工大学,2015.
ZHOU Quan.Research on Energy Recuperative Eddy Current Retarderfor Automobiles[D].Wuhan:Wuhan University of Technology,2015.
[10]GUO W G,LI D S,YE L Z.Performance analysis of an electromagnetic liquid-cooled energy recovery retarder for heavy vehicles[C]//2019 IEEE Vehicle Power and Propulsion Conference (VPPC).Hanoi:[s.n.],2019:1-4.
[11]GB/T 32692—2016,商用车辆缓速制动系统性能试验方法[S].
[12]闻邦椿.机械设计手册-第2卷-机械零部件设计(连接、紧固与传动)[M].北京:机械工业出版社,2018.
[13]黄国治.中小旋转电机设计手册[M].北京:中国电力出版社,2014.
[14]GB 12676—2014,商用车辆和挂车制动系统技术要求及试验方法[S].
[15]LIN N,ZONG C F,SHI S M.The method of mass estimation considering system error in vehicle longitudinal dynamics[J].Energies,2019,12(1):52.
[16]杜龔.载货汽车质量及路面坡度估计方法研究[D].西安:长安大学,2017.
DU Gong.Research on the Estimation of Mass for Truck and Road Slope[D].Xi′an:Chang′an University,2017.
[17]杨坤,高松,王杰,等.基于EMB的解耦式制动能量回收系统研究[J].汽车工程,2016,38(9):1072-1079.
YANG Kun,GAO Song,WANG Jie,et al.A study of decoupled brake energy recovery system based on electro-mechanical brake[J].Automotive Engineering,2016,38(9):1072-1079.
[18]高博麟.重型车与液力缓速器匹配特性的仿真研究[D].长春:吉林大学,2009.
GAO Bolin.Simulation Study on the Matching Performance of Heavy Vehicles and Hydraulic Retarders[D].Changchun:Jilin University,2009.
[19]GB/T 27840—2011,重型商用车燃料消耗量测量方法[S].
[20]高志伟,李德胜,叶乐志,等.带电涡流缓速车桥的铰接车辆制动稳定性研究[J].汽车工程,2020,42(7):917-924.
GAO Zhiwei,LI Desheng,YE Lezhi,et al.Study on braking stability of articulated vehicle with eddy current retarder axle[J].Automotive Engineering,2020,42(7):917-924.
