空间目标光度测量的消光修正拟合
2021-09-01杨轻云
满 意,杨轻云,陈 涛
(1. 中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2. 中国科学院大学,北京 100049)
1 引 言
随着航空航天技术的飞速发展,大量的航天设备被送上太空,用于通信、遥感、导航等方面[1-5]。与此同时,空间碎片等太空垃圾的数量也随之急剧增加,它们可能会对在轨航天器造成不可估量的影响,因此空间目标的监测及管理对于太空安全非常重要,成为了目前的研究热点[6]。在监管监测过程中,空间目标探测系统可以确定目标的尺寸和形状等目标特性,并对空间目标进行分类[7]。然而,对于中高轨目标,难以直接通过高分辨率成像获取目标信息,这时可以通过地基光学系统追踪中高轨道目标,从而获取其光度信息[8]。通过光度测量得到基于时间序列和基于相位角序列的光度曲线,用于反演目标的形状和姿态[9-10]。
目前,CCD 是获取空间目标光度信息的主要手段。基于CCD 测量星等的方法主要有对比法和标定法[11-12]。对比法是将在同一高角、背景以及仰角下获取的待测目标的图像和已知星等目标的图像进行灰度级对比,从而获取待测目标的星等。此方法每次测量都需要一个对比目标,计算复杂且无法同时测量多个目标。标定法是利用多颗不同方位和仰角的已知星等的恒星标定出标准零等星的灰度值,再将待测目标的灰度值与标准零等星的灰度值进行对比,从而获取待测目标的星等。此方法无需对比目标,可以同时测量多个目标,是目前常用的方法。
起初的光度测量方法没有考虑大气消光所产生的影响,最终计算结果的测量误差相对较大。后来考虑大气消光的影响,利用经典的大气透过率公式计算大气消光的星等,采用修正后的星等数据进行计算,得到的测量精度较之前有了一定的提高[13]。但经典的大气透过率公式是在一个理想环境下得到的公式,并不能很好地体现实际的大气环境状况,大气透过率会受海拔等各方面因素的影响[14]。同时,上述方法在计算标准零等星灰度值时都是采用算术平均值的方法,无法有效地降低大气不稳定所带来的异常数据对最终计算结果的影响。
本文基于以往的CCD 光度测量方法,利用实际测量数据对计算过程中的消光修正进行拟合,同时改进计算标准零等星灰度值的方法,采用迭代求均值的方法替换算术平均值的方法[15]。改进后的算法提高了测量精度,计算结果更适用于反演目标的形状和姿态。
2 测量原理
2.1 空间目标星等测量
空间目标反射太阳光产生亮度值,在天文学上用星等衡量空间目标的光度,规定1 等星的亮度是6 等星的100 倍[16]。当参考星为零等星时,未知星等的星A 的星等值ma可以表示为:

式中:G0为零等星的灰度值,Ga为未知星等星A的灰度值。
由式(1)可知,在已知星A 灰度值的情况下,只需知道零等星的灰度值就可以计算得到星A的星等值。计算零等星灰度值的公式为:

选取已知星等和灰度值的星即可通过式(2)计算出其相应的零等星的灰度值,选取多颗不同方位和不同仰角的恒星即可标定出标准零等星的灰度值。
2.2 经典大气消光模型
大气消光是指大气对辐射能量产生了折射、吸收和散射,导致光辐射强度衰减,因此在空间目标的光度测量过程中会产生误差。天顶角越大,辐射穿过的大气层越厚,大气消光所带来的影响就越大,经典的大气透过率公式为[13]:

其中:τ0=0.735 5,为在可见光范围内的垂直大气透过率,z为取弧度值的天顶角。消光星等xg的计算公式为:

因此在考虑经典大气消光后,计算星A 的星等值ma的公式可以改进为:

计算零等星灰度值G0的公式改进为:

将τz/τ0记为消光修正系数τ,其计算公式为:

3 迭代法标定标准零等星灰度值
在测量空间目标星等的过程中,标准零等星灰度值是否准确很大程度上决定最终结果是否准确。标定标准零等星灰度值通常采取的方法为多次选取不同仰角不同方位的已知星等和灰度值的星,计算出它们各自所对应的零等星的灰度值,然后取算术平均值作为标准零等星的灰度值。然而,取算术平均值的方法受不稳定大气的影响较大,当测量的恒星的灰度值出现异常时,标准零等星的灰度值会出现比较大的偏差。因此为了获取更加准确的标准零等星的灰度值,本文对此过程进行改进,利用迭代法获取均值[15]。迭代均值法计算标准零等星灰度值的流程如图1所示。具体步骤如下:
(1)计算零等星的灰度算术平均值X1,同时找到数据中的最大值Xmax,将Xmax替换为X1;
(2)计算更新后的零等星的灰度算术平均值X2,同时找到数据中的最小值Xmin,将Xmin替换为X2;
(3)再次计算更新后的零等星的灰度值平均值X3,并转到(1)进行迭代计算,直到数据的方差收敛为0。
4 消光修正拟合
在采用经典的大气消光公式进行计算时,由于没有充分考虑实际环境中消光的影响,最终的测量误差较大。本文利用实测数据拟合光度测量过程中的消光修正系数τ,从而得到更符合实际情况的测量数据,具体步骤如下:
(1)建立自变量为仰角E、因变量为消光修正系数τ、多项式次数为N的拟合公式:

多项式拟合次数通常不高于5,根据以往的经验及数据验证,N=3 时拟合效果最佳,因此:

(2)选取多颗不同高角和方位、仰角为E、星等为ma、灰度值为Ga的星,利用式(2)计算出对应的零等星的灰度值。
(3)计算步骤(2)得到的零等星的灰度平均值,将它作为消光后的标准零等星的灰度值G0,然后将G0以及步骤(2)选取的星的星等ma和灰度值Ga带入式(7),计算τ的值。
(4)将选取的星的仰角E和对应计算得到的τ值进行最小二乘拟合,从而得到多项式(9)的系数a0,a1,a2,a3,以及最终的拟合公式。
(5)将待测星的仰角带入拟合公式(9)计算对应的τ值,再通过公式(5)计算出其星等值。
5 测量结果
测量条件如表1 所示。首先选取30 颗不同方位和仰角的恒星,分别采取不加消光、经典大气消光和消光修正拟合3 种消光处理方法计算出相应零等星的灰度值,具体数据及计算结果如表2 所示。

表1 星等测量条件Tab.1 Magnitude measuring condition

表2 不同消光方法的零等星灰度值计算结果Tab.2 Calculation result of zero magnitude’s gray value with different extinction methods
在不同消光方法下分别采用求算术平均值和迭代均值两种方法计算最终的标准零等星的灰度值,计算结果如表3 所示。
再选取10 颗不同方位和仰角的待测恒星进行光度测量,通过式(5)计算测量星等,计算时采用表3 中的标准零等星灰度值。然后与10 颗恒星的理论星等进行比较得出测量误差。利用算术平均值计算的测量星等及误差如表4 所示,利用迭代均值计算的测量星等及误差如表5 所示。

表3 标准零等星灰度值计算结果Tab.3 Calculation result of standard“0”magnitude’s gray value
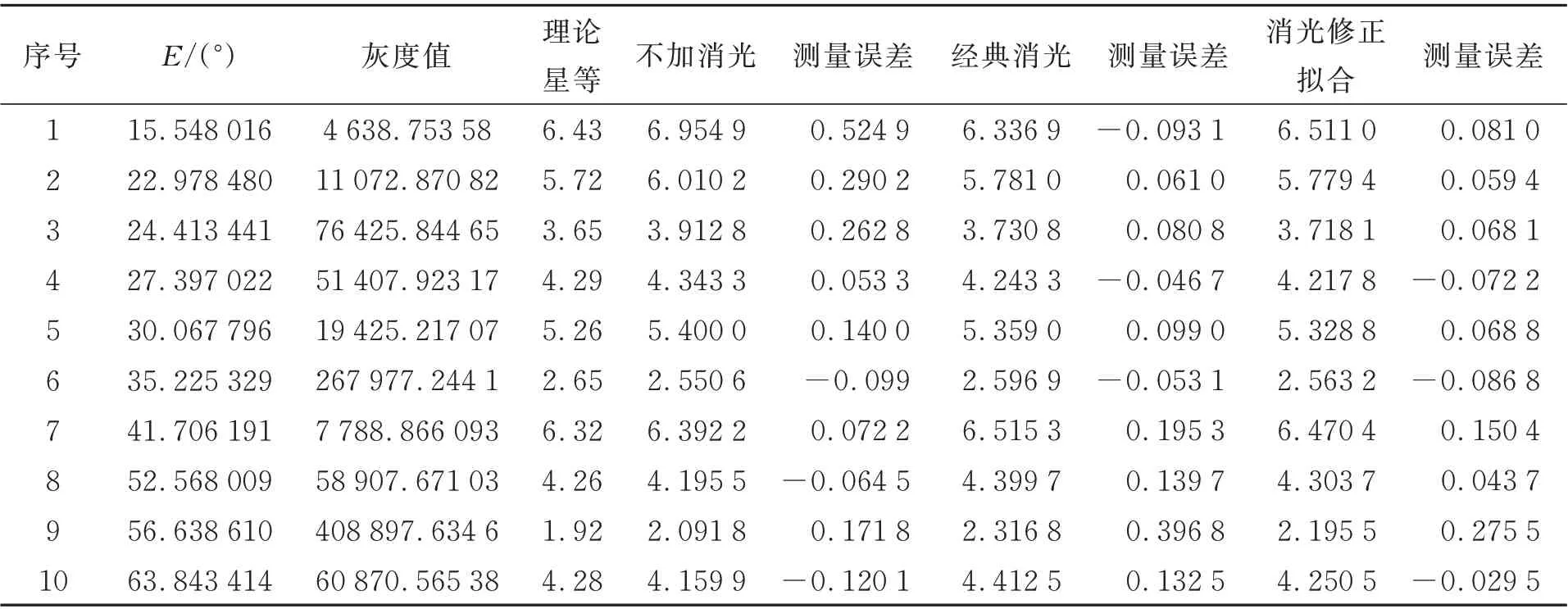
表4 取算术平均值时不同消光方法的光度测量结果Tab.4 Photometric measurement result of different extinction methods using arithmetic mean

表5 取迭代均值时不同方法下的光度测量结果Tab.5 Photometric measurement result of different extinction methods using iteration mean
测量精度σ为:

其中:Δmi为不同恒星对应的测量误差,n为恒星数量,计算结果如表6 所示。

表6 测量精度计算结果Tab.6 Calculation result of measurement accuracy
由表6 可以看出,在相同的计算均值方法下,消光修正拟合方法的测量误差最小,精度最高;在相同的消光处理方法下,迭代均值方法的测量误差更小,精度更高;改进后的方法的测量精度可以达到0.11 个星等。
6 结 论
本文研究了基于CCD 的空间目标光度测量的方法,针对空间目标监测中的光度测量算法进行改进和优化。首先介绍了光度测量的基本原理以及经典大气消光模型,然后分析了传统方法存在的问题并提出了消光修正拟合方法。同时,采用迭代法替代算术平均法计算标准零等星的灰度值。最后,选取30 颗不同方位和仰角的恒星计算标准零等星的灰度值,再选取10 颗不同方位和仰角的恒星计算测量精度。实验结果表明:优化后的光度测量算法的精度可以达到0.11 个星等,与之前算法相比测量精度更高,可为后续的姿态形状反演提供更准确的数据。
