基于高斯过程回归与硬件优化的可见光室内定位设计
2021-08-31宋艳英
宋艳英
(忻州师范学院 五寨分院,山西 忻州 140928)
室内定位是很多室内应用的关键技术,如军事侦察、仓库内车辆导航、火灾室内疏散以及零售业的基于位置服务等.据相关报道[1],到2022年,全球室内定位总市场将增长至409.9亿美元,我国科技巨头华为科技有限公司也逐步将高精度室内定位推向消费级市场[2].因此,室内定位技术的研究具有较大的商业价值和意义.
通常,室内定位技术必须具备准确度高、灵敏、可扩展、低成本和高可靠性等特点.迄今为止,已有一些相关研究成果,如基于射频识别(RF)的定位方法[3],基于蓝牙、Wifi技术[4]、激光SLAM技术[5]、红外线技术[6]等.受限于多径衰落效应,基于Wifi或蓝牙技术的定位精度普遍较低.基于RF技术的缺点也是精度较差,且响应时间较长.激光SLAM技术的精度非常高,但激光传感器的成本太高.
理想的室内定位解决方案应该在系统性能和成本之间达到合理的平衡.基于可见光通信(VLC)的室内定位技术[7]具有精度高、能效好、成本低等特点,是一个不错的选择.基于VLC的室内定位,按照接收器分,可分为基于相机和光电二极管两种.基于相机的方法[8]可以利用手机前置摄像头,通过到达角(AOA)定位算法,自然启动信标广播.手机摄像头作为天然的AOA传感器,提供了空间辨别能力.但这种方法也存在一些固有缺陷,如严格依赖视线(LOS)视图,并要求所有光信标的位置登记.文献[9]也是一种实用相机接收器的VLC室内定位,该方法结合室内照明LED布局实际情况,从可见光传输距离短、定位精度高的特点出发,将传输距离信息作为加权因子引入定位算法中,提高了定位精度及扩大了定位区域.
与之相比,使用光电二极管作为接收器的VLC室内定位具有信号处理更加简单、不依赖于LOS视图和位置登记等特点.文献[10]将光电二极管作为接收器,并与手机、相机信息进行了融合.文献[11]只将光电二极管作为唯一的接收器,运用光分解技术和贝叶斯理论进行室内定位,但所研究的平台区域非常小.
由于光电二极管作为接收器方面的优势,本文重点研究了该类型的VLC室内定位系统.重新设计了接收器和LED灯,使用多个LED灯作为共享光学介质,向单个光电二极管接收器提供可靠的信标广播,使用高斯过程回归推导出定位结果.实验结果表明所设计的室内定位系统具有很好的易用性、较高的精度和鲁棒性.
1 提出的室内定位系统
系统架构如图1所示,包括一组作为定位信标的VLC兼容LED灯,以及通过音频插孔连接到用户设备(如智能手机)的光电二极管接收器.系统架构采用分布式结构,每个LED灯在共享光信道上通过单向通信将其唯一信标标识向接收器进行广播.配备接收器的用户设备对多个光信标进行连续观测,获取每个信标标识及其相应的接收信号强度(RSS).由此,通过这些观测实现室内定位.
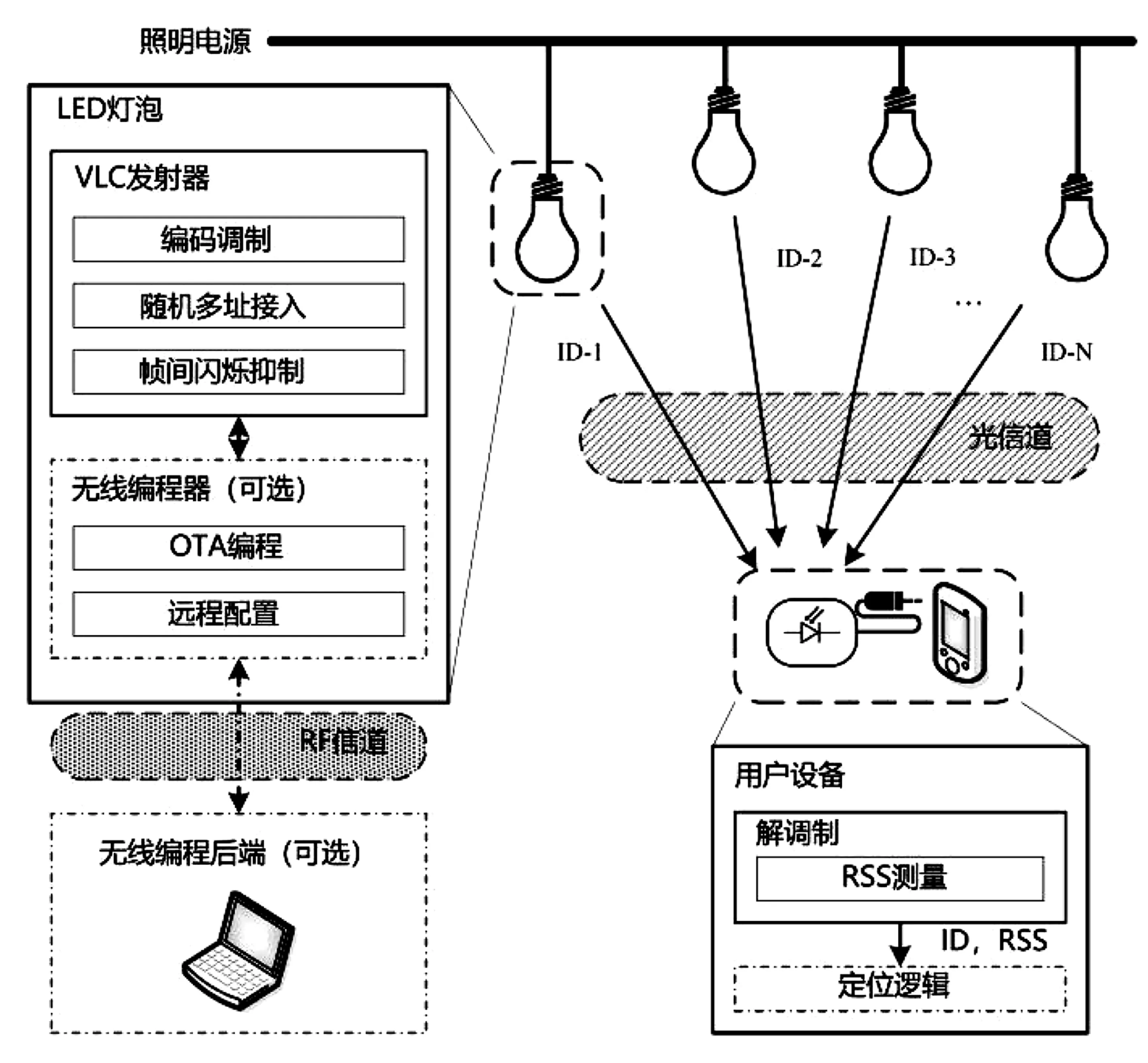
图1 系统架构示意图
1.1 室内定位系统的逻辑通信
在单向通信下,LED灯永远不知道其发送的信标消息是否被接收器正确解译.因此,提出的系统中采用了基于BFSA的随机多址方案,以避免在不知情和未协调的光信标之间的持续冲突.在实现随机多址接入过程中,LED灯在所需时隙到来时才执行数据传输,由于曼切斯特码数据是直流均衡的,因此在数据传输期间不会出现帧内闪烁.但进入空闲状态,会出现帧间闪烁问题[12].
为了抑制帧间闪烁问题(帧内闪烁可以通过曼切斯特编码解决),根据IEEE 802.15.7标准,让LED灯在空闲状态下发送伪数据消息来防止闪烁.伪消息的调制频率选择带内或带外频率皆可,系统中的伪消息为重复的“01”符号,提供与信标消息相等的平均强度.特定情况下,灯光可通过适当的DC电流驱动而无需调制,只要空间时隙中的DC强度等于活动时隙中的平均强度,即可实现LED灯的总体亮度保持一致.本文倾向于选择带外高频(如100 kHz)进行调制,其可通过接收器上的低通滤波器轻易移除.
1.2 基于高斯过程回归的定位算法
为了对提出的系统进行定位验证,采用了基于指纹技术,使用高斯过程回归(GPR)[13-14]算法进行定位.即根据稀疏的指纹采样,利用GPR构建一个强度分布模型.然后,使用贝叶斯滤波器建立强度图进行定位.
1.2.1 基于GPR的环境建模

利用高斯过程从训练集中预测函数f上的后验分布.两个函数值f(xp)和f(xq)之间的协方差由输入数值xp和xq决定,其可通过核函数k(xp,xq)来描述.通常选择高斯核函数如下:
(1)

(2)

(3)
式中:K=[k(xp,xq)]∈Rn×n为输入数值的协方差矩阵.给定任一输出x*,则函数值f(x*)上的后验分布为高斯为:
(4)

(5)
预测分布提供了基于位置的VLC接收信号的概率回归模型.由此,可以创建一组强度分布图,包括用于定位的每个光信标的平均图和方差图.
1.2.2 基于GPR的定位计算
本文使用贝叶斯滤波进行定位表示:
(6)
式中:u0:t-1为控制输入;p(yt|xt)为观测模型;p(xt|xt-1,ut-1)为运动模型;p(xt-1|y0:t-1,u0:t-1)为先前的估计.
假定不同灯光的观测相互独立,则观测模型可表示为:
(7)
(8)
2 系统的硬件优化
2.1 VLC兼容的LED灯
目前商用LED灯具尚不支持VLC功能,本文设计出易于使用的紧凑型LED灯,灯泡使用标准E27螺丝灯头,易于安装到灯泡插座上.LED驱动器的原理图如图2所示,包括AC-DC电源、DC-DC降压变换器、电压控制电流源(VCCS)、低成本微控制器(MCU)、调试连接器和LED板.AC-DC电源模块的输出为12 V,最大功率4.5 W.考虑到功率容限,选择了一块3 W的LED板.DC-DC变换器从12 V降至5 V,以供电其他电路.在微控制器的控制下,通过VCCS调节LED电流.信号调制、编码和随机多址控制[15]都作为固件在微控制器内实施.借助无线编程器,可根据需要对固件进行更新.利用当前商用的LED灯泡组件构建提出的灯泡,主要由标准E27螺丝灯头、商用AC-DC供电、LED板、调试连接器、集成DC-DC转换器和微控制器的VLC控制板构成.

图2 LED灯泡驱动器电路原理图
2.2 组装后的接收器
接收器是VLC室内定位的关键之一,与相机接收器相比,光电二极管的接收器则具有能量高效、电池负担小、信号处理更加简单的优点.且不依赖于LOS视图,使用无模型定位方法(例如指纹)时不需要位置登记.本文接收器电路的设计图如图3所示,包括PIN型光电二极管(PD)、带DC偏置校正的跨阻抗放大器(TIA)、低通滤波器(LPF)和小型锂电池.通过音频插孔将接收器连接到USB声卡上;在计算机上利用python库实现信号采集和解调制;可通过微型USB接口为锂电池进行充电;组装后的接收器通过音频插孔连接到声卡的接收器电路.
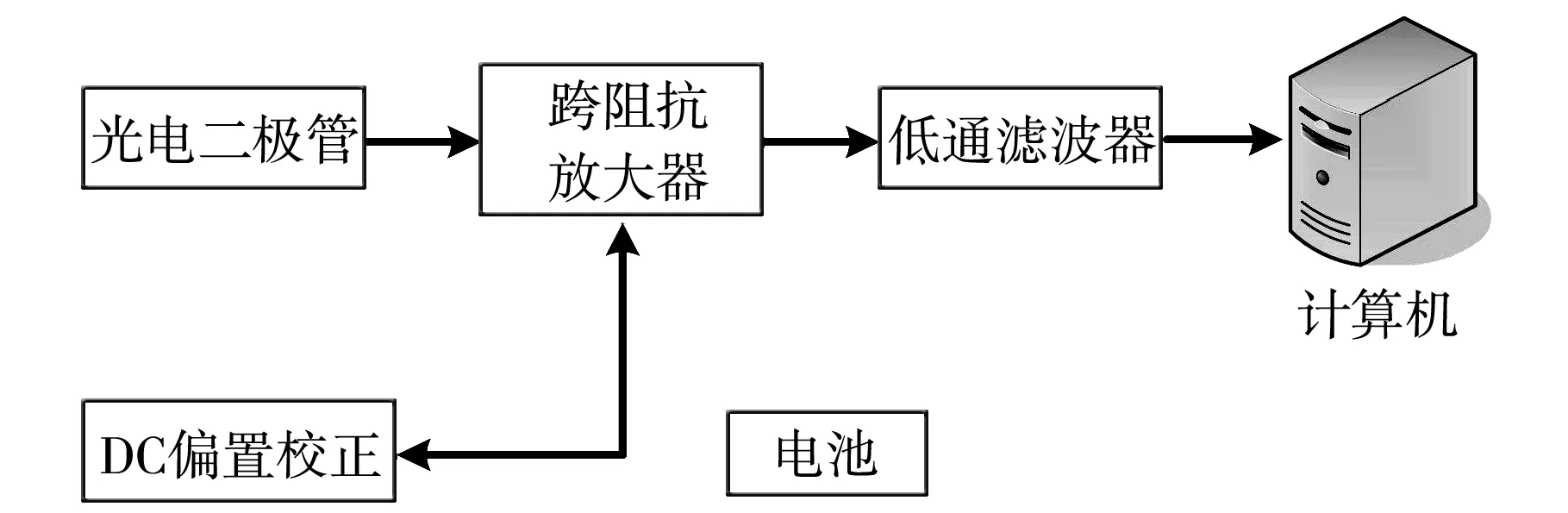
图3 光电二极管接收器电路原理图
之所以这样组装接收器,是因为实验中,阳光、荧光灯和白炽灯可能会造成环境干扰,其中包括较大的DC偏置,以及一些较强的低频分量(100或120 Hz)和高频谐波.此外,所提系统中的伪消息广播也会带来高频分量.较大的DC偏置可能会造成接收器电路的饱和.为避免这种情况,在TIA中加入一个误差积分器以纠正DC偏置.将输出信号偏置到一个固定值.这里采用四阶巴特沃斯低通滤波器来移除伪消息广播产生的高频干扰.
3 系统评价与分析
3.1 实验设置
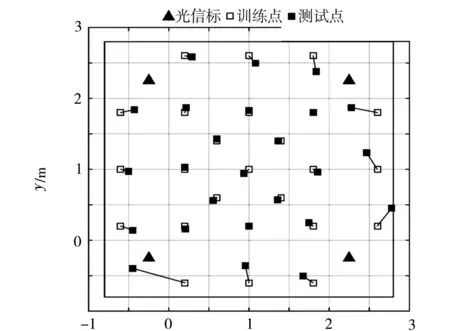
室内定位的平台在一间包括4个本文定制LED的房间中.LED等安装在3 m×3 m的正方形实验台的4个角,离地高度2.4 m,实验为每个LED灯生成虚拟VLC信号序列,其中嵌入了唯一标识码(使用OOK调制方案和曼切斯特编码)和基于BFSA的多址控制.采用所提GPR算法在稀疏指纹采样上构建细粒度光强图.在中心区域以0.4 m间距创建6×6点的2D网格作为GPR的训练样本,如图4所示.

x/m图4 训练点和测试点的图示
然后在中心和边缘区域均匀选择25个额外的位置作为测试点.使用商用激光测距仪,以约2 cm的准确度确定这些点的位置.实验主要评价所提系统在真实应用中的定位性能.
3.2 室内定位结果
实验过程中,打开4个LED灯,其他室内灯具保持关闭.因为LED灯泡最大功率为3W,远低于其他荧光灯的正常额定功率,而高能低频组件会造成接收器电路的饱和,一般可以使用大功率LED灯,通过选择较小的放大增益来解决这一问题.
采集36个位置处的指纹样本,构建所有光信标的强度分布图.首先以25个静态位置(图5)进行实验.估计位置和地面真实位置如图6所示.最大定位误差出现在测试台边缘附近.这是因为仅在测试台中央区域采集指纹样本,生成的光强图不能很好地匹配边缘区域的强度分布.
x/m图5 静态位置处的定位结果
实验中的位置误差经验累积分布函数(CDF)如图6所示.
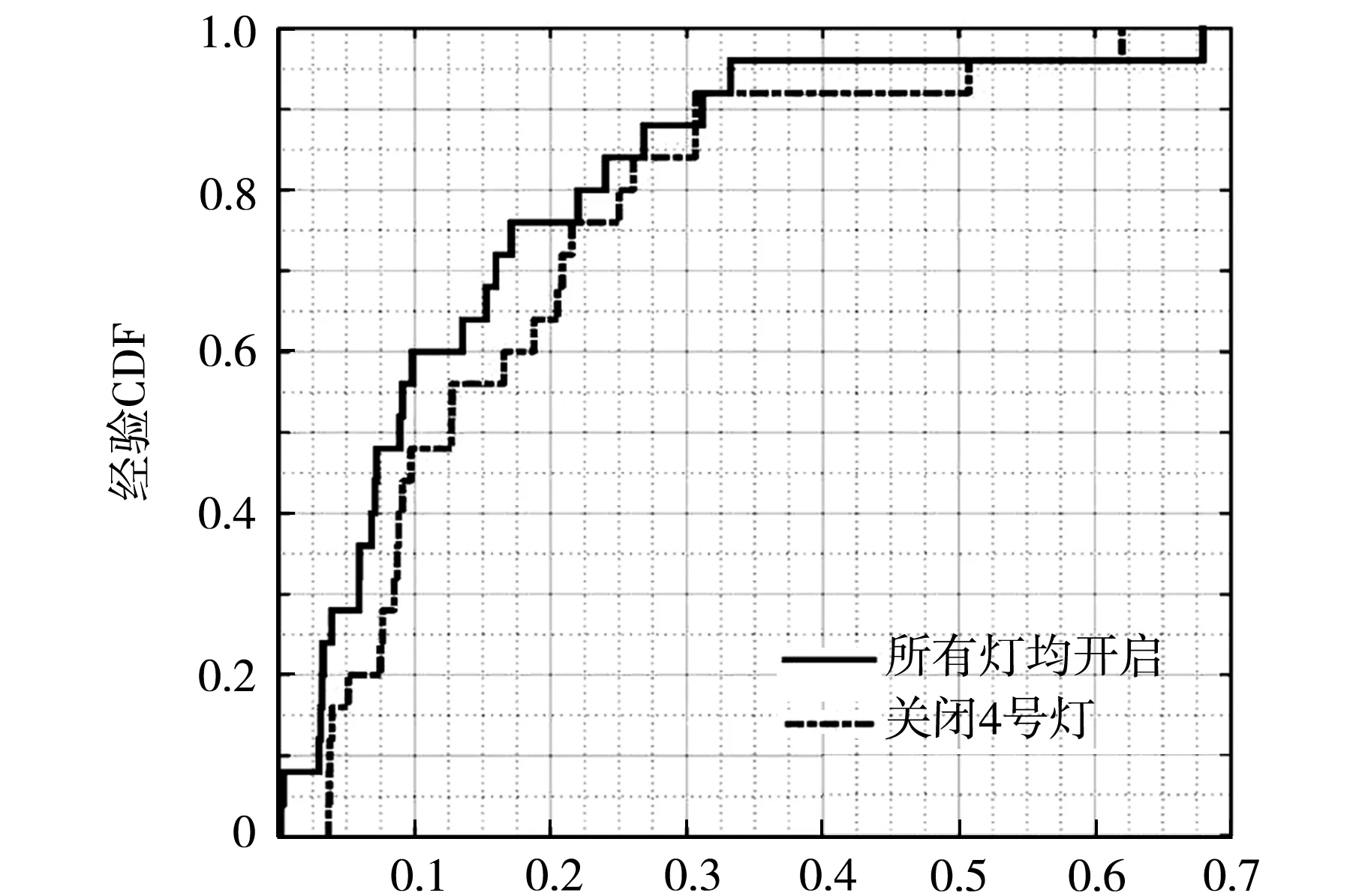
位置误差/m图6 两种不同情况下的CDF
平均误差为0.04 m,90百分位点的误差为0.34 m.为评估对灯光故障的鲁棒性,本文故意关闭了4号灯并重新进行实验.图6中的虚线是关闭4号灯的位置误差CDF.可以看出,定位准确度稍有下降,但依然获得了0.11 m的平均误差,90百分位点的误差为0.5 m.这证明所提定位系统对一定程度的灯光故障具有较好的鲁棒性.
本文还评价了室内定位结果的一致性.即VLC接收器位置固定在测试台中央,并连续记录600 s的估计位置,得出:平均误差为0.037 m,标准偏差为0.01 m.且误差呈离散状,这是因为强度分布图的解析度为0.04 m,平均误差与光强度解析度是相符的,这也说明了系统具有较好的一致性.为演示实际用例,在地面上沿两个闭环矩形组成的固定轨迹对接收器进行移动,如图7所示.可以看出,估计轨迹与地面真实轨迹十分相似.整体来看,对于运动目标的室内定位也接近于静止目标的定位效果.
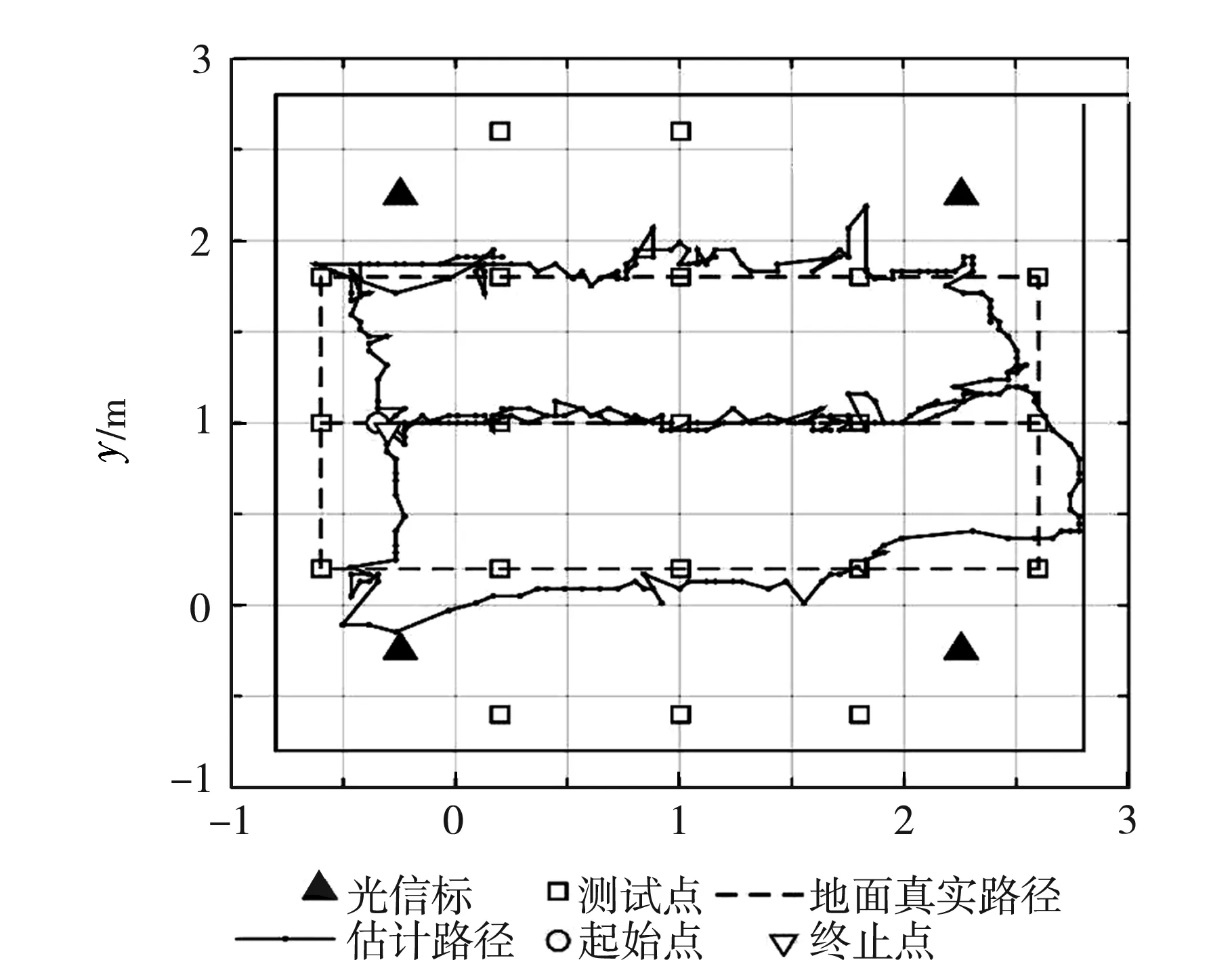
x/m图7 沿轨迹运动的定位结果
3.3 与类似VLC室内定位的比较
使用一台PC电脑(英特尔酷睿i5-4590四核CPU @2.80GHz),从不同运行时长,对如图9的运动目标进行定位,比定位的平均误差和最大误差,从而也可以反映出鲁棒性.按照4.1节实验设置进行布置,运行时间分为短时间100 s,长时间400 s.
表1~2给出了在使用不同数量的LED灯(4~7个)时,3种不同方法的综合性比较.

表1 100 s运行准确度和鲁棒性比较

表2 600 s运行准确度和鲁棒性比较
由表1~2可知,本文定位系统在定位的平均误差方面更小、最大误差更小.从100 s和600 s的比较看,其结果相差不大,即长时间定位的鲁棒性更佳.而文献[11]的方法表现较差,该方法仅使用贝叶斯理论进行定位,倾向于处理1 m2左右的小平台,其错误的初始值会导致较大的误差.
4 结 论
本文设计了一种基于GPR的VLC室内定位系统,使用光电二极管为接收器,针对实际问题,实施了基于BFSA的随机多址方案.LED灯也采用紧凑设计,支持即插即用功能.与类似采用光电二极管为接收器的室内定位方法相比,所提系统具有更好的定位精度,定位失败的次数更少.从连续记录结果看,可以满足长时间定位,且长时间定位和短时间定位相差不大,具有较好的鲁棒性.
