基于高精度电子地图的卡车预见性巡航策略
2021-08-28朱青松李军伟曹学自王玉海李兴坤
朱青松,李军伟,曹学自,王玉海,李兴坤
(1.255049 山东省 淄博市 山东理工大学 交通与车辆工程学院;2.266041 山东省 青岛市 吉林大学青岛汽车研究院;3.266043 山东省 青岛市 中寰卫星导航通信有限公司青岛分公司)
0 引言
卡车的预见性巡航是以提高燃油经济性以及驾驶员驾驶的舒适性为目标开发的一种新型辅助驾驶技术,其主要作用是当卡车行驶在高速公路上时,预见性巡航策略根据车辆前方道路状况,通过相应的预测算法规划好卡车在前方道路行驶时的目标节油扭矩,以该目标扭矩驱动卡车在前方道路上行驶,达到省油的目的,同时实现卡车的自动驾驶。
目前,国内学者对车辆预见性巡航技术进行了较多的研究。文献[1]推出了一款主动预见性巡航控制系统。该系统使用GPS 定位确定高速公路上的车辆位置,根据车载电子地图数据预测前方道路的路况。当卡车行驶到上坡或者下坡时,通过调节卡车的巡航车速来控制卡车行驶,在整个行驶过程中可节省高达3%的燃油;文献[2]设计了基于自适应巡航的预见性巡航策略。策略不仅能够判断前方道路中行驶车辆的车速,控制卡车的车速来保持车辆间的安全距离,而且还能基于预测的前方道路路况预设车辆在前方道路行驶的经济巡航车速。设计的预见性巡航策略将测试车辆的节油率提高到3%;文献[3]根据车载地图数据中的前方道路路况信息,通过分层控制策略规划了卡车以最佳燃油经济性行驶时的车速曲线,通过控制车辆的行驶车速达到节约燃油的目的。从这些文献提供的数据来看,虽然都有节油效果,但效果不明显,有待进一步提高。本文采用具有自主知识产权的中寰卫星导航通信有限公司的高精电子地图,以一汽解放青岛生产的JH6重型卡车作为开发平台,开发了基于高精地图的卡车预见性巡航系统,该系统使卡车的节油率超过7%。
1 预见性巡航节油方法分析
1.1 卡车的行驶动力学模型
在卡车行驶的过程中,燃油消耗最小是预见性巡航的巡航目标,因此,完整、准确的车辆纵向动力学模型在策略的优化过程中起到至关重要的作用[4-5]。对卡车进行动力学受力分析时将卡车看作一个整体,当卡车在坡道上行驶时,在行驶方向上对其进行受力分析,如图1 所示[6-7]。根据受力分析得到卡车的动力学公式为
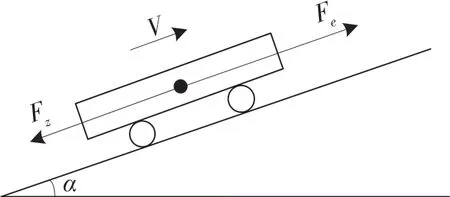
图1 重型卡车坡道方向上的受力分析Fig.1 Force analysis of heavy trucks on ramp direction

式中:Fe——卡车的驱动力,N;Fz——卡车在坡道上行驶的阻力,N;m——卡车的质量,kg;a——卡车的加速度,m/s2。
卡车在道路上行驶的阻力主要有风阻、坡道阻力、滚动阻力等,其中,坡道阻力在下坡时为驱动力。将式(1)进行阻力拆分,可得卡车在高速公路上行驶的动力学方程为

式中:Ff——卡车受到的滚动阻力,N;Fi——卡车受到的坡道阻力,N;Fw——卡车风阻,N。
其中,
当道路的坡度值非常小时,坡度余弦值近似为1,因此式(2)可写为

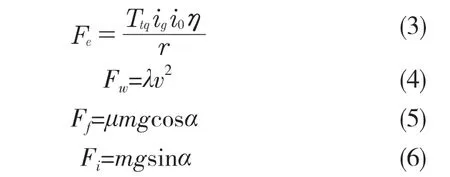
式中:Ttq——卡车的需求扭矩,N·m;α——道路坡度,v——卡车的当前车速,km/h;r——卡车的车轮半径,m;g——卡车的重力加速度,m/s2;ig,i0,η,λ,μ——常数,分别为变速器的传动比、主减速器的传动比、传动系统的机械效率、总的风阻系数以及轮胎与地面的摩擦系数。
卡车在进行预见性巡航行驶时,巡航策略对每段道路给予的扭矩值基本稳定,并且卡车在道路上行驶时受到的风阻相比于其它阻力值数量级较小,因此,卡车可以近似看作为匀加速、匀减速或者匀速运动[8]。由此可以得出卡车在某段道路上行驶的车速与加速度之间的关系式:

式中:v——卡车行驶完某段距离后的末速度,m/s;v0——卡车进入某段道路时的初速度,m/s;s——行驶的道路长度,m。
选择卡车的初始车速作为风阻计算的车速值,并根据式(7)和式(8),得到卡车在当前路段需要的发动机输出扭矩值为

根据式(9)求得的驱动扭矩值Ttq即为预见性巡航策略计算的目标行驶扭矩。其中,v0——卡车入坡时的初始车速;v——预见性巡航策略在当前道路选取的目标经济车速。
1.2 卡车节油行驶方式
卡车在高速公路上行驶时,“高挡低速”相比于“低挡高速”能够节约更多燃油,并且卡车的行驶车速越低,发动机用于维持车速的输出扭矩就越低,因此“高挡低速”并且使发动机的运行工况尽可能地保持在最优工作区间内是卡车预见性巡航的节油基础。本文的预见性巡航策略是针对通过手动换挡的卡车设计的,由于卡车不能实现自主换挡,所以,卡车的巡航挡位为最高挡,当卡车不在最高挡时,不能进行预见性巡航。高速公路上的路况根据坡度的大小分为平缓坡、大上坡和大下坡3 种类型,其中,平缓坡分为缓上坡和缓下坡2 种类型。巡航策略结合全局路段的路况,合理控制发动机扭矩来实现对车速的控制。以平路稳、上坡冲、下坡滑等行驶方式为基础,合理利用车辆惯性从而降低油耗[9]。卡车在进行预见性巡航时节油行驶方式如图2 所示。
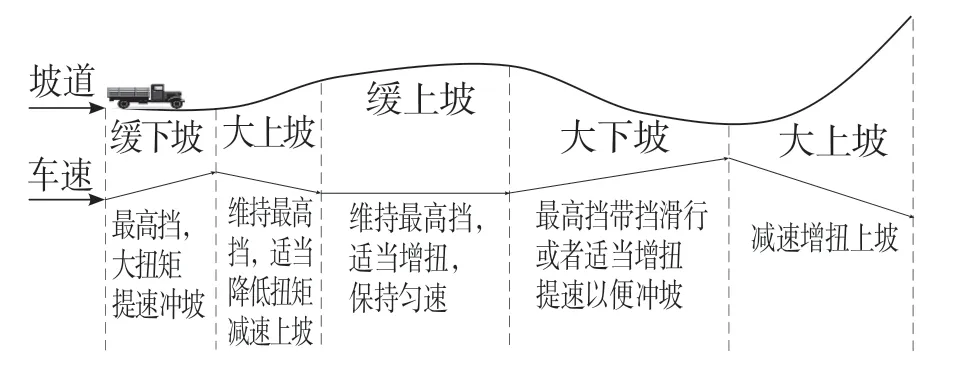
图2 卡车预见性巡航节油行驶方式Fig.2 Foreseeable cruise fuel-efficient driving mode of truck
在平缓坡道路上,预见性巡航策略会根据卡车在最高挡位下发动机的最优工作区间来确定车辆的行驶车速,根据式(9)求得车辆保持匀速行驶时的行驶扭矩,以达到节油的效果。
对于大上坡,巡航策略会在上坡前根据上坡路段的平均坡度和坡道长度进行预测,然后在满足卡车动力性的前提下尽可能地使卡车以较低车速爬坡。卡车在爬坡时以保证动力性为前提尽可能减少发动机的扭矩输出,提高燃油经济性。
对于大下坡,巡航策略的目标为控制卡车在挡滑行,以滑行的方式行驶到坡底。通过精确的预测判断,保证卡车滑行下坡的安全性,同时,也避免了卡车在下坡时因不必要的发动机动力输出而造成燃油消耗。
2 预见性巡航策略研究
卡车在高速公路上行驶时,在没有遇到特殊情况时,驾驶员一般会在卡车的最高挡位上驾驶卡车向前行驶。对于手动挡卡车,当卡车需要升降挡时,驾驶员脚踩离合器踏板,此时,会导致卡车退出预见性巡航。卡车预见性巡航行驶的目的是在提高卡车运输经济性的同时,减少驾驶员对卡车的驾驶操作来缓解驾驶压力,所以,本文以卡车的最高挡位为目标挡位来执行相应的巡航策略,这也符合巡航策略“高挡低速”的省油方式。
卡车在进行预见性巡航时,首先会对预见性巡航策略相关的参数进行计算处理,例如,巡航策略中最优车速的设置以及卡车变速箱的相关参数和发动机的相关参数的读取处理等,然后巡航策略根据卡车当前的定位坐标,获取前方2 km的道路数据,再后按照道路路况的不同会执行不同的扭矩预测方法,利用策略求出卡车在前方每一段道路的经济行驶扭矩,当卡车行驶到该段道路上时会按照预测的扭矩结果进行驱动[10]。
2.1 初始化巡航参数
2.1.1 默认最优车速
巡航策略的最优车速用于平缓道路或者某些陡坡的目标行驶车速,同时也是卡车巡航时默认的节油车速,驾驶员可以在启动预见性巡航时操作多功能杆来设置默认的最优车速。多功能杆实物图如图3 所示。

图3 多功能杆实物图Fig.3 Physical picture of multi-function lever
本文针对不同客户的需求设计了两种最优车速选择模式。最优车速的第1 种设置方式是将多功能杆开关从“OFF”拨到“ON”,然后按下“SET-”开关可以将策略事先保存的车速值设置为卡车巡航时的默认最优节油车速。卡车在高速公路上行驶时,一般在最高挡行驶,根据发动机外特性曲线在发动机最优转速区间内取一个发动机最优工作转速,然后根据选取的转速值和卡车的最高挡位传动比求得卡车巡航时的默认最优车速。选取的发动机最优工作转速值可以通过标定的方式进行调整。第2 种设置方式是将多功能杆开关从“OFF”拨到“ON”,然后按下“SET+”开关将卡车巡航的最优车速设置为自定义车速。驾驶员通过脚踩油门加速到自己想要的车速,然后操纵多功能杆进入预见性巡航,巡航策略就会记录当前的车速值作为目标最优车速。
2.1.2 车辆配置参数
策略中所需的车辆参数包括发动机的相关参数、变速箱的相关参数,以及车轮半径、主减速器传动比等车辆的其他参数信息等,巡航在启动时可以实时提取相关的车辆参数值。其中,发动机参数包括发动机允许工作以及正常工作时的最高转速和最低转速值,此外,还有不同发动机转速下对应的外特性扭矩值和制动特性扭矩值。巡航策略会对发动机转速对应的外特性扭矩值及制动特性扭矩值进行处理,模拟出该发动机对应的外特性曲线和制动特性曲线以便于在策略中使用。变速箱相关参数包括变速箱的相关挡位及每个挡位对应的传动比。
2.2 巡航扭矩值预测
本文通过高精度电子地图的道路数据获取前方2 km 道路的路况,根据道路坡度数据对前方道路的路型进行划分。以图2 为例,若图中所示的道路总长为2 km,根据地图中的道路坡度数据将道路划分成5 段,分别为缓下、大上、缓上、大下以及大上,那么图中存在的道路组合路型为缓下大上、大上缓上、缓上大下、大上大下,策略针对不同的道路路型有着不同的扭矩预测策略。对巡航扭矩值进行预测时,策略会根据后一段的道路预测前一段道路的扭矩,巡航策略将2 km 的道路按照顺序依次预测。从定位位置开始,将卡车在当前定位位置的实时车速作为卡车巡航预测时的初始车速,根据策略预测出第1 段道路的行驶扭矩和行驶至段尾的车速,然后,将第1 段道路预测的末尾车速作为第2 段道路的预测初始车速来预测第2 段道路的行驶扭矩,根据顺序以此类推,直至2 km 道路预测完全。图2 中所示路型的扭矩预测策略如下:
(1)缓下大上。为了满足卡车在后一段大上坡路的动力性,在缓下坡时给车辆提供大的扭矩,让卡车在入坡前提前加速冲坡。首先计算车辆在大上坡道路行驶时满足上坡条件的最低车速,将上坡的最低车速与默认最优车速作比较。如果最低车速值小于最优车速,那么默认最优车速值作为缓下坡的行驶目标车速;如果最低车速值大于最优车速,为了让卡车一直保持预见性巡航,策略在计算行驶扭矩时会以损失一定的油耗为代价将最低车速值作为缓上坡或者缓下坡的行驶目标车速,保证后一段大上坡路的动力性。
(2)大上缓上。为了保证卡车在后一段缓上坡道路上行驶的动力性,本文将大上坡坡顶的目标车速设置为巡航默认最优车速,然后计算卡车行驶到默认最优车速的扭矩值。如果扭矩值超过发动机外特性,那么将设置的坡顶车速依次递减直至发动机允许工作的最低转速值限制的最低车速,寻找合适的扭矩。
(3)缓上大下。当路型为缓上大下时,在满足大下坡滑行到坡底的车速小于安全车速的前提下,让卡车在缓上坡行驶时尽量采用小的驱动扭矩,将加速重心转移到大下坡上。首先计算卡车在下段大下坡安全滑行到坡底的初始车速,并与默认最优车速值比较。如果最优车速值小于或者等于安全滑行的初始车速,策略会计算出一个扭矩值,使卡车在当前缓上坡以默认最优车速保持匀速行驶,如果扭矩值超外特性就以外特性扭矩行驶;如果最优车速值大于安全滑行的初始车速,此时,在缓上坡加速到最优车速已经不合适,因此,本文计算一个需求扭矩使卡车在本段行驶至段尾的车速为卡车能够在大下坡安全滑行的初始车速,如果该扭矩为负值,那么在本段巡航策略会让卡车滑行以减少动力损失。
(4)大下大上。当出现一个大下坡路段连接着一个大上坡路段时,巡航策略首先预测车辆在下一段大上坡道路上以最高挡行驶时能够爬坡的最低限制车速,然后卡车以滑行为前提保证卡车滑行到坡底的车速大于爬坡最低限制车速,但小于安全车速限速值。
3 巡航策略实车测试及结果分析
对预见性巡航策略进行实车测试时,本文选取青岛一汽解放的JH6 重型卡车作为实验车型。图4 为实验测试车辆。表1 为测试车辆的部分实车参数。

图4 测试车辆Fig.4 Test vehicle

表1 车辆实车参数Tab.1 Vehicle parameters
实车测试时,让多位驾驶经验丰富的卡车司机按照测试路线驾驶车辆,从T-BOX 终端数据中获取卡车行驶车速、里程以及油耗等数据,然后对比卡车预见性巡航与司机手动驾驶时的行驶油耗。车辆的测试路线为从青岛城阳南高速入口出发,经龙青高速-荣潍高速-青新高速行驶一圈,行驶路线如图5 所示。

图5 卡车测试路线Fig.5 Truck test route
从测试路线内选取大约10 km 的路段,比较司机驾驶与卡车预见性巡航的行驶数据结果。图6 为司机驾驶和卡车预见性巡航的发动机扭矩对比图。根据仿真结果可以看出,预见性巡航的道路分段策略能够将前方道路划分成段,每段都能对应一个平均坡度值和行驶扭矩值。相比于司机驾驶扭矩的波动性,预见性巡航策略能够在每一段给予一个稳定的扭矩值,保持发动机工作时的稳定性。
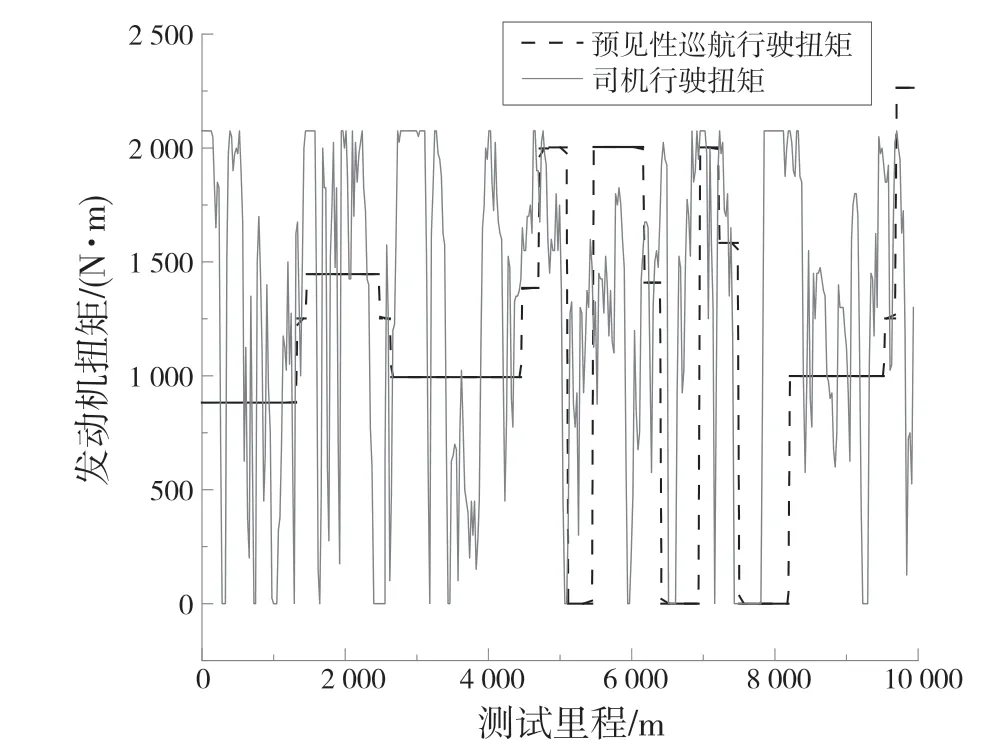
图6 扭矩对比Fig.6 Torque comparison
图7 为司机驾驶和预见性巡航驾驶的行驶车速对比图。从图7 中的对比结果看,卡车预见性巡航行驶时在大部分的测试里程内要小于司机驾驶的车速,但是巡航车速也能维持在一个较高车速,既能保证卡车的动力性,也符合预见性巡航“高挡低速”的省油方式。
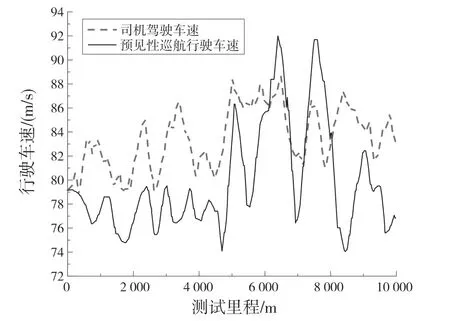
图7 车速对比Fig.7 Speed comparison
图8 为选取路段的平均坡度和扭矩划分对比结果。根据图8 的测试结果看,预见性巡航策略在每一段道路都能够根据道路分段后的平均坡度值给卡车提供一个合适的驱动扭矩。当平缓坡前方为大上坡时,在平缓坡路段给卡车提供一个大扭矩来提前冲坡;当平缓坡前方为大下坡或者前方依然为平缓坡时,在平缓坡路段给卡车一个小扭矩以维持车速。当卡车行驶到大上坡时,给卡车一个大扭矩来满足卡车爬坡时的动力性;当卡车行驶到大下坡时,给卡车一个0 扭矩来实现卡车的滑行。

图8 平均坡度与扭矩对比Fig.8 Comparison of average slope and torque
在测试路线内进行多次实车测试,验证巡航策略的节油效果。节油效果的验证方式为让多位驾驶经验丰富的卡车司机按照测试路线驾驶车辆,从T-BOX 终端数据中获取卡车行驶车速、里程以及油耗等数据,然后对比卡车预见性巡航与司机手动驾驶时的行驶油耗。按照相同的测试路线,对司机驾驶的3 次油耗数据和卡车预见性巡航的3 次油耗数据进行对比分析,结果如表2所示。
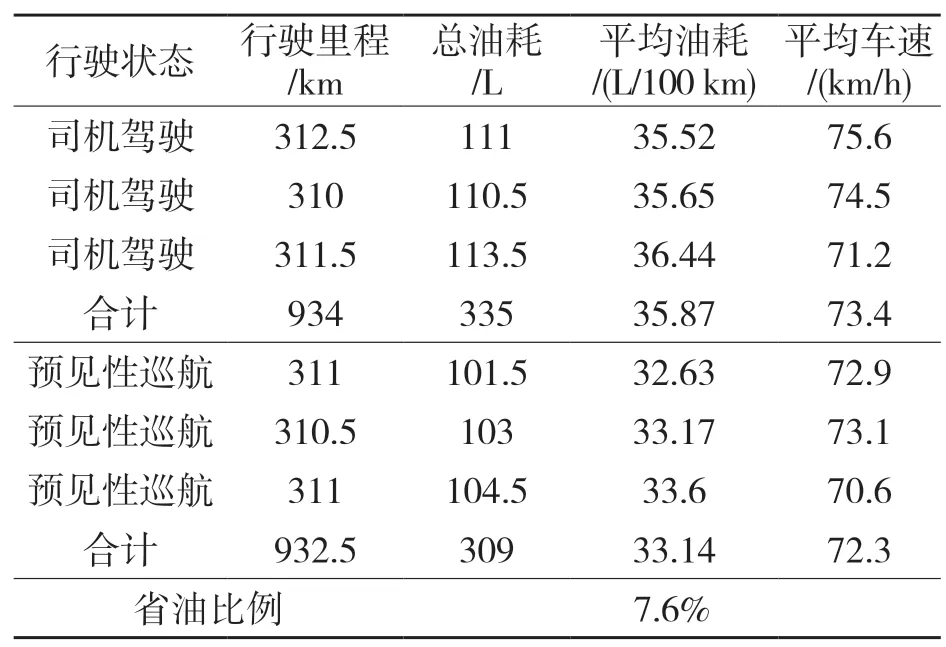
表2 卡车实车油耗对比数据Tab.2 Comparison of fuel consumption of trucks
在测试结果中,由于定位精度的影响以及T-BOX 对卡车行驶里程计数的误差,再加上实车测试时偶尔会去服务区停留休息,因此,会导致每次实车测试完的行驶里程会有所误差。由于本文在计算卡车的行驶油耗时计算的是卡车行驶的百公里平均油耗,因此行驶里程的计数误差可以忽略不计。结果表明,卡车预见性巡航时的平均油耗均小于司机驾驶的油耗,并且行驶的平均车速差别很小,节油率达到7.6%。卡车进行预见性巡航时,相比于人为驾驶卡车来说,能够节约更多的燃油,预见性巡航策略的燃油经济性符合设计要求。
4 结论
(1)基于高精度电子地图的卡车预见性巡航策略,通过独特的预测算法,实现了卡车的预见性巡航功能。根据前方道路的路况,对前方道路进行分割规划,卡车行驶到每段道路时都能够结合卡车的节油行驶方式执行相应的巡航策略,以预测的巡航扭矩值驱动卡车向前行驶。
(2)通过对预见性巡航策略的实车控制效果以及节油效果进行实车测试,表明了本文所设计的预见性巡航策略能够根据前方道路的路况合理规划卡车的行驶方式,实现卡车的自动节油行驶,节油率超过7%。预见性巡航策略在提高卡车燃油经济性的同时,减轻了驾驶员的劳动强度,卡车的预见性巡航策略符合设计要求。
