虾塘投饲船载自适应速度投饲系统设计与实现
2021-08-26叶杰民张丽珍刘单寒鲁兴益
叶杰民,张丽珍,吴 迪,刘单寒,鲁兴益,王 萍
(1上海海洋大学工程学院,上海 201306;2上海海洋可再生能源工程技术研究中心,上海 201306)
中国自20世纪80年代开始池塘养殖南美白对虾,人们已对其生活习性进行了持续深入探索和研究。南美白对虾生活与觅食主要分布在池塘靠近堤岸附近区域[1-5]。根据这一特性,传统的人工投喂方式是把饲料投喂在虾塘四周的“食道”区域上,以获得较好的养殖效果[6-8],但人工投饲难以将饲料均匀抛撒到虾塘“食道”上。
为了提高虾类养殖的自动化水平,实现饲料沿着“食道”的均匀投放,学者们结合虾塘的实际情况,开展了投饲船的研究。唐荣等[9]设计了一种采用蓄电池的电动投饲船及测控系统,能够控制投饲船在虾塘投饲;马迪红[10]设计了使用双体船为移动载体的投饲系统,可以调控虾塘投饲量大小;程文平[11]也采用双体船为载体,设计了一套基于北斗自主导航的投饲装置;王琢等[12]设计了载人式投饲船的推进系统,其投喂方式还是以人工投喂为主;Ruan等[13]研制了一款多功能可用于虾塘的自动投饲船,设计了一种新的导航方法;洪扬等[14]设计制作了一种用于大中型蟹、虾塘养殖池塘的移动投饲装置,可以较为精准地调节投饲速度;胡庆松等[15]设计了基于明轮驱动的虾塘投饲船,速度限定在3个档位;胡庆松等[16]还设计了一种投饲船载专用振动式平衡下料系统。但是目前这些投饲船的投饲速率都没有与船速相关联,在船速受到风等环境因素的影响时,会造成饲料在“食道”上投喂不均匀。
为此,设计了一种能实现虾塘投饲船均匀投饲的系统,该系统能根据当前的实际船速,实时调整投饲船上投饲机的投饲速率,使饲料能均匀分布在虾塘的整个“食道”上,达到均匀投饲的目的。
1 投饲船载自适应速度投饲系统的组成
1.1 系统设计要求
投饲船载自适应速度投饲系统是上海海洋大学自主研发的精准投饲船的组成部分。如图1所示,精准投饲船由2个船体、料箱和投饲机构组成。该系统主要针对的是长三角地区面积为0.47 hm2左右,边长在30~100 m的养殖虾塘[17-18],“食道”宽2~3 m,距离虾塘岸边3~4 m,如图2所示。投饲时,投饲船沿着“食道”行驶一周,投饲机构将一次投饲量的饲料均匀投放在“食道”上,投饲船的行驶时间与投饲机构投饲时间相等。由于“食道”周长固定,行驶时间取决于投饲船的行驶速度。理论上某一区域的投饲量与投饲速率、行驶速度相关,控制投饲速率与行驶速度实时匹配,使得每个区域投饲量相同。因此,以一定时间间隔检测船速,根据此船速调整投饲速率是系统设计的关键。

图1 精准投饲船Fig.1 Precise feeding boat

图2 虾塘“食道”及UWB定位系统布局Fig.2 Layout of the feeding path and UWB positioningsystem in shrimp pond
1.2 投饲系统结构
投饲船载自适应速度投饲系统由投饲机构、船速的获取和自适应速度投饲控制系统3部分组成。投饲机构根据与船速对应的投饲速率,通过由舵机驱动的摇杆滑块机构来控制投料口的开度,实现对投饲速率的控制。船速的获取部分先通过UWB定位系统,根据设定的时间间隔,将检测到的船体位置信息输入到STM32单片机控制系统中,再根据速度解算程序解算出实时的船速。自适应速度投饲控制系统分为两部分,一是用于计算参数和控制舵机的单片机,二是输入和显示有关参数的上位机。
在上位机中输入一次投饲量Q、食道周长L和间隔时间T,由单片机计算出舵机需要转动的角度,控制系统控制舵机转动该角度,带动投料口打开到对应的开度。同时单片机将投饲船的位置坐标、实时速度与投料口开度传输到上位机中显示出来。
2 投饲机构
2.1 投饲机构结构
投饲机构安装在料箱的出料口处(图1),其结构见图3,图3中S代表投料口的开度。投饲机采用振动下料,通过振动电机的振动保证饲料从投料口均匀出料。摇杆与舵机盘相连,滑块与出料门固定连接。投饲机构通过摇杆滑块机构将舵机的旋转运动转化为滑块的直线运动,从而控制出料门的左右移动,控制投料口开度大小。
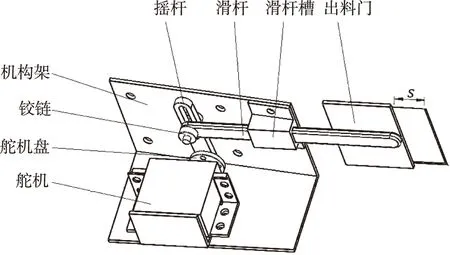
图3 投饲机构结构图Fig.3 Structure drawing of the feeding mechanism
2.2 舵机转角的控制
选用的是型号为MG996R的金属铜齿轮舵机[19],工作电压3.0~7.2 V,工作扭矩13 kg·cm,转速在无负载且电压为4.8 V时速度为0.98 rad/s,舵机的控制需要一个20 ms左右的时基脉冲,其角度控制的脉冲宽度范围为0.5~2.5 ms,总间隔为2 ms,量程为180°。对应的控制关系为:0.5~2.5 ms脉冲对应舵机转角0°~180°,由此可以得到脉冲宽度和转动角度之间的关系为:
(1)
式中:y为脉冲宽度,ms ;β为转动角度,(°)。根据式(1)可以通过控制输出的脉冲宽度来控制舵机的转角。
2.3 舵机转角与开度的关系
由于投料口的开度是舵机控制的,所以需要确定舵机转角与投料口开度之间的关系。投饲机构的机构简图如图4所示。

图4 投饲机构结构简图Fig.4 Structure sketch of the feeding mechanism

(2)
再根据二角和差公式sin(β+γ)=sinβcosγ+cosβsinγ,可以得到:
(3)
式中:γ=60°,a=S,b的长度为C点到A点的距离,等于0.03 m,代入式(3),经整理得到转动角度β和开度S的关系为:
(4)
式中:S为投料口开度,m;β为摇杆的转动角度,(°)。
3 投饲船的速度获取
3.1 投饲船坐标位置的获取
采用UWB定位技术[20-22]来获取投饲船的位置信息。选用型号为D-DWM-PG2.5评估板,采用TOA/TDOA (Time/Time Difference of Arrival,到达时间)估计方法[23-25]中的DS-TWR(Double-sided Two-way Ranging,双边双向测距)法[26-28]来检测船体的位置。使用UWB定位功能对投饲船进行二维定位,需要3个安装在虾塘岸边的基站(1个主基站A,2个副基站B、C)和1个放置在投饲船上的定位标签,如图2所示。将A基站作为坐标原点(0,0),B、C基站分别为X,Y轴上的一点,根据定位标签与3个基站之间距离解算出当前标签(即船)的x、y坐标。
定位标签的输入输出端与STM32单片机相连,在UWB定位系统工作时,定位标签将位置信息以ASCII码的格式,通过TTL自由协议端口传输到STM32单片机。单片机根据ASCII码表[29]中的对应关系,对位置信息进行提取,具体过程是通过识别一段输出信息的前后特殊符号来获取位置信息的ASCII码,“0x58”对应的是“:” “0x0d”对应的是CR,也就是回车键,将这两段ASCII码作为读取本段时间的位置信息的起始和终止标志。获取到位置信息的ASCII码后,将其转换成十进制信息:先从符号开始,首先判断位置信号中是否带有负号,其次再从最高位依次开始处理,逐个十进制位进行累加得到真实的位置数据。
3.2 实时船速的计算
假定船一直沿着食道行走,在转弯处船体会停在转弯点调整方向,直到船体转到下一段食道方向再继续前进。根据获取到的某一时间间隔首末时间点投饲船的位置信息,计算该段时间内的平均船速,即实时船速V1:
(5)
式中:T为设定的间隔时间,s;(x1,y1)为起始点的船体坐标,m;(x2,y2) 为结束时的船体坐标,m。
在船体到达转弯处时,船体处于静止状态,系统停止对速度获取。等到船体转弯结束开始直线运动时,系统重新开始对船速获取。
4 自适应速度投饲控制系统
4.1 投料口开度与船速之间的关系
要获得实时船速与舵机转角之间的关系,需要先通过投饲速率和投料口开度之间的关系,得到投料口开度和船速之间的关系。
投饲速率与投料口开度之间的关系是通过试验获取的,试验记录固定质量的饲料通过不同投料口开度所需时间,根据试验数据,通过双移速方差分析得投料口开度与投饲速率之间的关系:
V2=ηs
(6)
式中:s为投料口开度,m;V2为投饲速率,kg/s;η为试验得到的关系系数,kg/(s·m)。通过试验统计,得到η=10 kg/(s·m)。

(7)
式中:L为食道周长,m;Q为一次投饲量,kg。Q为投饲前的已知值,将式(6)代入式(7),得到投料口开度与船速的关系:
(8)
4.2 船速与舵机转角之间的关系
由于投料口的开度是通过舵机旋转实现的,所以需要建立船速与舵机转角之间的关系,将式(4)代入式(8),可以得到船速V1与舵机转角β之间的关系:
(9)
此式可以根据实时船速V1计算出舵机转角β,控制系统通过式(1)关系控制摇杆旋转角度,及时调整投料口开度,改变投饲速率。
4.3 自适应速度投饲控制系统的实现
自适应速度投饲控制系统的硬件主要包括STM32单片机、PC上位机和2个通讯模块。
通讯方式选择的是LoRa通讯协议模块[30],选用的型号为上海卓岚ZLAN9743,工作电压为DC9~24 V。将LoRa模块通过专属的软件,将其参数设置完成后,通过RS232串口,一个LoRa模块与投饲船上的STM32单片机连接,另一个与上位机建立通讯。单片机选用型号为STM32F103ZET6,具有较强的运算能力以及足够快的运算速度,能满足控制系统响应速度快的要求。
自适应速度投饲控制系统的软件主要由单片机软件和上位机软件组成。
其中单片机软件在Keil uvision5 集成开发环境中,用 C 语言编写,主要有船速计算程序和舵机控制程序。船速计算程序接收UWB定位系统传输过来的位置信息,通过LoRa模块获取的间隔时间T,根据式(5)计算出间隔时间内的平均船速V1。舵机控制程序获取上位机输入的Q和L后,根据式(9)和式(1)计算得出对应船速V1的舵机转动角度β和需要的脉冲宽度。将脉冲宽度传给舵机,实现舵机的控制。
上位机的功能是方便参数输入和修改,以及显示输出参数。系统的输入量为一次投料量Q、食道周长(投饲船路程)L和间隔时间T。输出量为投饲船的位置坐标和、速度和投料口开度大小。
5 自适应速度投饲系统的测试
为了检验自适应速度投饲系统的正确性,需要进行船速获取精度试验和投饲机构投料口开度试验。
由于水面试验会受到风浪流的影响,船速无法精准控制,也无法保持直线行驶。为了便于控制速度、观察投饵情况和记录数据,用小车代替投饲船体,将控制板卡和投饲机构放在小车上在陆地进行模拟试验。因为只需要记录不同船速下投料口的开度,所以试验时投饲机部分只保留投饲机构,在投料口的侧面标记标尺,在标尺上端固定摄像机(手机),记录试验中投料口开度情况。搭载精准投喂控制系统的可变速小车如图5所示。

图5 搭载精准投喂控制系统的可变速小车Fig.5 Variable speed car equipped with precise feeding control system
试验在50 m × 50 m的空旷场地进行,在场地的3个角落分别放置UWB定位系统的3个基站,如图6所示。

图6 试验场景图Fig.6 Experimentscene diagram
行程L设定为200 m,投饲量Q设置为20 kg,船速计算的时间间隔设定为10 s。控制小车以0.5 m/s、1 m/s、1.5 m/s和2 m/s 4种速度分别匀速行驶100 s,小车试验示意图如图7所示。

图7 试验示意图Fig.7 Test diagram
在行驶过程中,控制系统把计算获得的小车行驶速度值保存到文件,并传输到上位机上显示,手机拍摄带有刻度标尺的投料口的变化情况,以视频文件保存。文件中记录的小车行驶速度结果如表1。

表1 不同给定小车速度下获取的小车速度值Tab.1 Speed values of the small vehicle obtained atdifferent given speeds
由表1可知,通过UWB定位系统获取的速度与实际速度的误差在2%以内。
在上位机中显示的投料口开度是根据式(8)解算的计算值,可能与实际值有误差,因此通过手机拍摄的视频来观测在不同给定小车速度时投料门在标尺上的位置。标尺的最小单位为mm,若观测结果在标尺刻度上,记为整数值;在刻度之间,记0.5 mm。通过拍摄的视频得到的投料口开度如表2所示。

表2 不同给定小车速度下得到的投料口开度Tab.2 The feeding port opening obtained at different givenboat speeds
表2中的第1行值是根据式(9)计算出的对应不同给定速度的投料口理论开度。
由表2可知,投料口开度的误差在2.5%以内,即投饲速度的最大误差为2.5%。在测试中,记录到投料口变化响应时间在0.7 s以内。
以上表明该自适应速度投饲系统能满足均匀投饲的实际需求。
6 结论
设计了一种虾塘投饲船载自适应速度投饲系统,该投饲系统通过UWB定位技术计算出精确的实时行驶速度,通过设计的摇杆滑块机构实现对投饲速率的控制,通过控制系统实现投饲速率自动与船速相适应,使饲料均匀投放在虾塘“食道”上。试验表明,在船速0.5~2 m/s的工作情况下,该自适应速度投饲系统投饲速率误差在2.5%以内,可以满足使用要求。与人工投喂和现有的移动投饲船相比,该投饲系统能根据实时船速调整相应的投饲速率,实现均匀投喂,从而减少饲料的浪费。为了方便观测和获取试验数据,本研究只进行了陆地试验。在实际水上行驶过程中,船体的振动、水面风浪等因素会对开度实际大小产生影响,影响投饲的均匀性。为了更加适应实际情况,使饲料的投喂精准均匀,后期应设计投料口开度的反馈系统,根据反馈信息自动修正开度大小,这是下一步应研究的内容。
□
