基于ESTARFM模型的农作物类型识别方法应用
2021-08-26包珺玮于利峰乌兰吐雅许洪滔于伟卓敦惠霞
包珺玮,于利峰,乌兰吐雅,许洪滔,于伟卓,敦惠霞
(1.内蒙古自治区农牧业科学院农牧业经济与信息研究所,内蒙古呼和浩特 010031;2.内蒙古自治区农业遥感工程技术研究中心,内蒙古呼和浩特 010031)
当前的农作物类型识别方法主要是基于单景高分辨率影像和多时相影像,单景高分辨率影像具有农作物纹理、形状、色调特征表现清晰的优势,能有效提高农作物类型识别精度,但是单景高分辨率影像成本较高,往往重访周期较长,很难体现农作物完整物候信息[1];多时相影像提取方法大多是选择Landsat 和GF 影像与MODIS 影像的时间序列数据集结合进行农作物提取,该方法易获取影像,能够在一定程度上杜绝“同物异谱,异物同谱”现象,提高了农作物类型识别精度[2]。
随后有学者提出了遥感影像时空融合的方法,遥感影像时空融合是将高空间低时间分辨率与高时间低空间分辨率影像融合,生成一种高时空分辨率影像特征的技术[3]。目前的融合技术主要集中在融合MODIS 和Landsat 两种影像上。其优点首先表现为两种影像的成像时间相近且两者轨道参数一致,可以减弱不同传感器的系统差异,提高融合精度。其次,两种影像融合可以解除Landsat 影像易受云层和阴雨天气影响的局限性,有利于农作物长期有效的监测[4]。
目前,遥感影像时空融合主要是采用线性混合模型。2006年GAO 等[5]提出的时空自适应反射率融合模型(STARFM),该方法是提取丰度矩阵和低分辨率影像的平均反射率实现影像融合的方法;平博等[6]利用STARFM 将GF 数据和MODIS 数据进行时空融合,在红、近红、绿波段表现出了很好的相关性。但是有学者提出该方法对异质性区域融合效果不好。随后ZHU 等[7]对STARFM 模型进行改进,提出增强型时空自适应反射率融合模型(ESTARFM),ESTARFM 模型能够有效提高对异质性区域的融合精度。邬明权等[8]在利用融合MODIS 与Landsat 数据生成高时间分辨率数据研究中,对比了5 种影像融合方法,结果表明,ESTARFM模型的融合影像与真实影像表现出高度相关性;刘咏梅等[9]在基于MODIS-Landsat 时空融合的陕北黄土高原植被覆盖动态变化研究中,采用ESTARFM 模型获取陕北黄土高原的Landsat NDVI 时序数据,得到融合后的Landsat NDVI 数据与真实Landsat NDVI 数据在植被信息的表达方面具有较高的相关性,表明ESTARFM 模型对复杂地形植被监测有很好的空间细节表达能力。牛忠恩等[10]利用ESTARFM 模型融合MODIS 和Landsat_8OLI 数据,获得空间分辨率30 m、时间步长8 d 的时间序列数据,能够有效提高MODIS 数据中混合像元的精度。比较而言,ESTARFM 模型充分考虑了像元异质性,可以有效提高数据融合精度。
对于农作物类型识别研究,关键在于获取农作物关键生育期的高时间、空间分辨率影像,本研究基于ZHU 等[7]提出的ESTARFM 模型,利用MODIS 时间序列数据和Landsat 数据融合影像,并建立NDVI时间序列数据集,通过与真实影像对比分析农作物类型识别结果,研究ESTARFM模型的适用性。
1 材料和方法
1.1 研究区概况
研究区地处河套灌区,位于40°10′N~41°25′N,106°23′E~108°47′E,该区域地势平坦,西南高、东北低,属于温带季风气候,灌区热量充足,全年积温2 700~3 200 ℃,农作物种类很多,包括春小麦、玉米、向日葵、糜子及瓜果蔬菜,是内蒙古中西部主要产粮基地。
1.2 数据及预处理
通过对研究区2019年4—9月影像数据查询,选择了云量在0~5%的Landsat 影像(下载地址http://ids.ceode.ac.cn),轨道号为12932,时间选择研究区农作物物候期内的2019年4月21日、2019年6月8日、2019年8月27日的3 景影像。MODIS 数据来源于NASA 网站(https://glovis.usgs.gov),选择MOD09GA 产品250 m 分辨率数据,成像时间选择与Landsat 数据成像相同的时间,由于MODIS 影像2019年6月8日(159 DOY)影像云层较多,所以选择6月9日即MODIS 第160 DOY 数据。4月21日、8月27日两景影像为基准影像,6月8日影像为验证影像,用来测试融合影像精度。
利用MRT(MODIS reprojection tool)工具,将MOD09GA 影像重投影UTM-WGS84,进行裁剪并重采样至30 m 分辨率,使得处理后的影像和Landsat 影像的投影方式、分辨率、像元大小保持一致并选择对植被反射率反应较好的绿、红、近红外3 个波段[11]。
1.3 研究方法
本研究选用ESTARFM 模型,融合Landsat 影像与MODIS 影像,获得时间序列Landsat NDVI 影像数据集,将其与Landsat 真实影像分别输入随机分类模型,进行农作物类型识别,具体流程见图1。
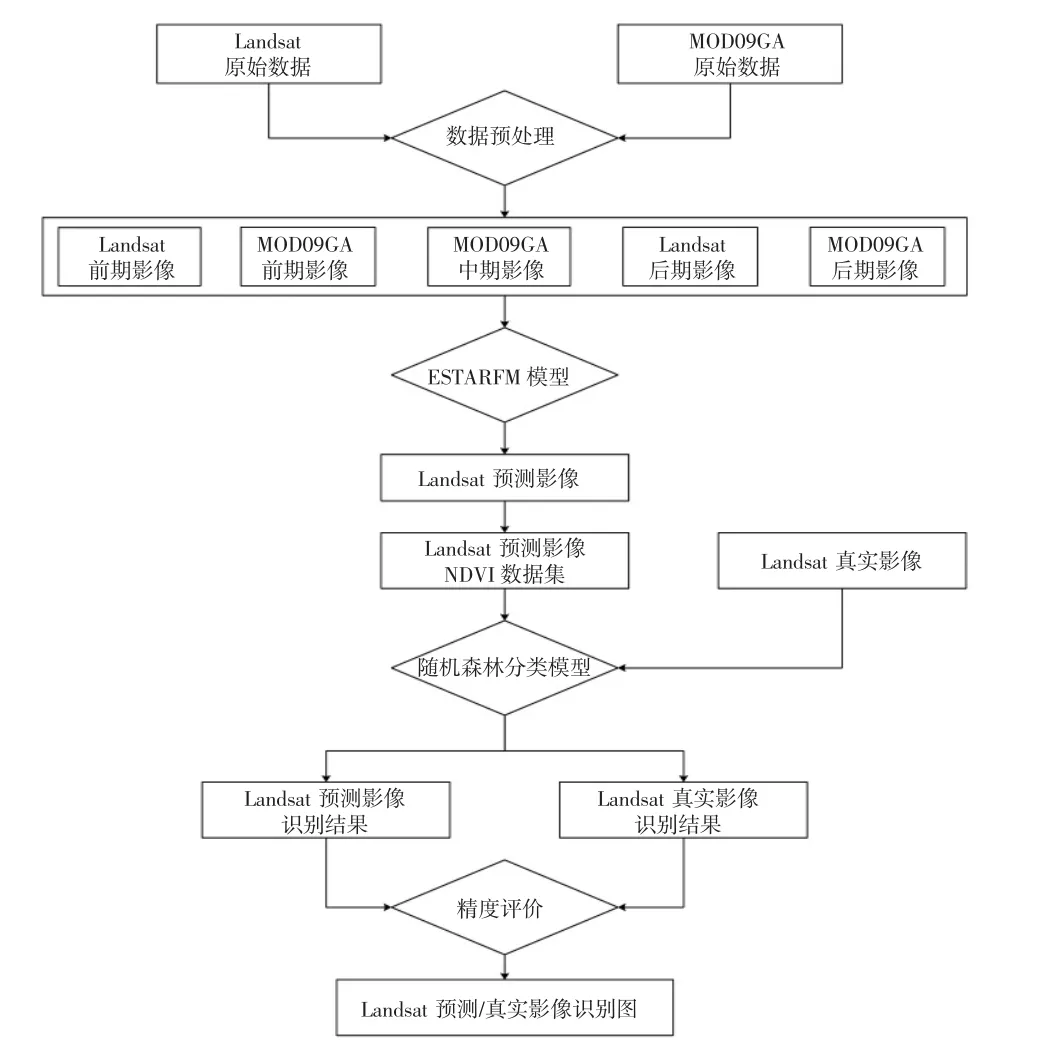
图1 技术流程
1.3.1 ESTARFM 模型 ESTARFM 模型首先假设两种影像上一对像元的反射率差异仅仅是由不同影像地表反射率的系统偏差引起,且两个时期影像上反射率没有较大偏差[12-13],公式为

式中,L、M分别表示Landsat 影像与MODIS 影像;(x,y)表示像元位置,B表示影像波段;t0、tP分别表示影像获取的2 个时间;a为转换系数。但是往往地表地物类型复杂,必须考虑地物大范围内混合像元的反射率,所以假设前后两种类型影像混合像元的反射率变化代表像元中不同地表覆盖成分反射率变化的加权总和,公式为

式中,v(x,y)表示考虑了混合像元分解的第i个相似像元。公式充分考虑了邻域像元的地面反射率变化,通过相邻像元移动窗口计算预测影像的中心像元值,进而得到预测影像,公式为

式中,n是包括中心预测像元的相似像元的数目;(xi,yi)是第i个相似像元的位置;W是第i个相似像元的权重;Vi是第i个相似像元的转换系数。
依据第1 个时期m时刻Landsat 与tp时刻的MODIS 预测tp时刻Landsat 影像的反射率,表示为L(xw/2,yw/2,tp,B)或者利用第2 个时期n时刻的观测数据预测tp时刻的Landsat 影像的反射率,表示为Ln(xw/2,yw/2,tP,B)。依据这2 个预测结果的加权组合可以获得精确的tp时刻的Landsat 影像反射率[14-15]。根据Tm和Tn与预测时刻tp之间MODIS 反射率检测到的变化幅度计算权重,公式为

预测中心像元反射率,公式为

将处理好的Landsat 和MOD09GA 数据及用于预测的中间时刻MOD09GA 数据,导入ESTARFM模型,生成预测时刻为2019年LANSAT 数据[16-17]。
1.3.2 NDVI 时间序列 归一化植被指数(NDVI)是指利用植被叶片近红外波段和红波段的光谱差异,能够反映真实地表植被生长情况、植被覆盖度的指数。在一定区域范围内,相同农作物具有相同的物候特征曲线,而NDVI 时间序列能够客观地反映农作物随时间变化的光谱特征,被广泛用于农作物类型识别研究[18]。NDVI计算公式

式中,Nir表示近红外波段;Red表示红波段。
1.4 分类方法
随机森林(random forest,RF)是机器学习的重要方法且具有很广泛的用途。其原理是利用多个分类器投票决定分类结果,对于一个输入样本,N棵树会有N个分类结果。而随机森林法可以集成所有的分类投票结果,将投票次数最多的类别指定为最终的输出。在遥感领域其优点是几乎不需要设置参数就可以得到比较好的提取结果,而且能够有效地运行在大数据集上,能够满足未来大尺度范围提取要求[19-20]。
2 结果与分析
2.1 ESTARFM 模型融合结果
本研究采用定性和定量相结合的方法进行影像融合效果评价,即采用目视解译和相关性分析方法。由图2 可知,2019年6月7日影像预测选取具有代表性的耕地、居民区、林地等地物类型,可以直观地看出预测影像能够较好地表现各地物类型的边界和轮廓信息,预测影像和真实影像相似程度较高,但是预测影像受到红波段影响较大,尤其是耕地在假彩色波段组合显示为深红色,色调和亮度高于原始影像。
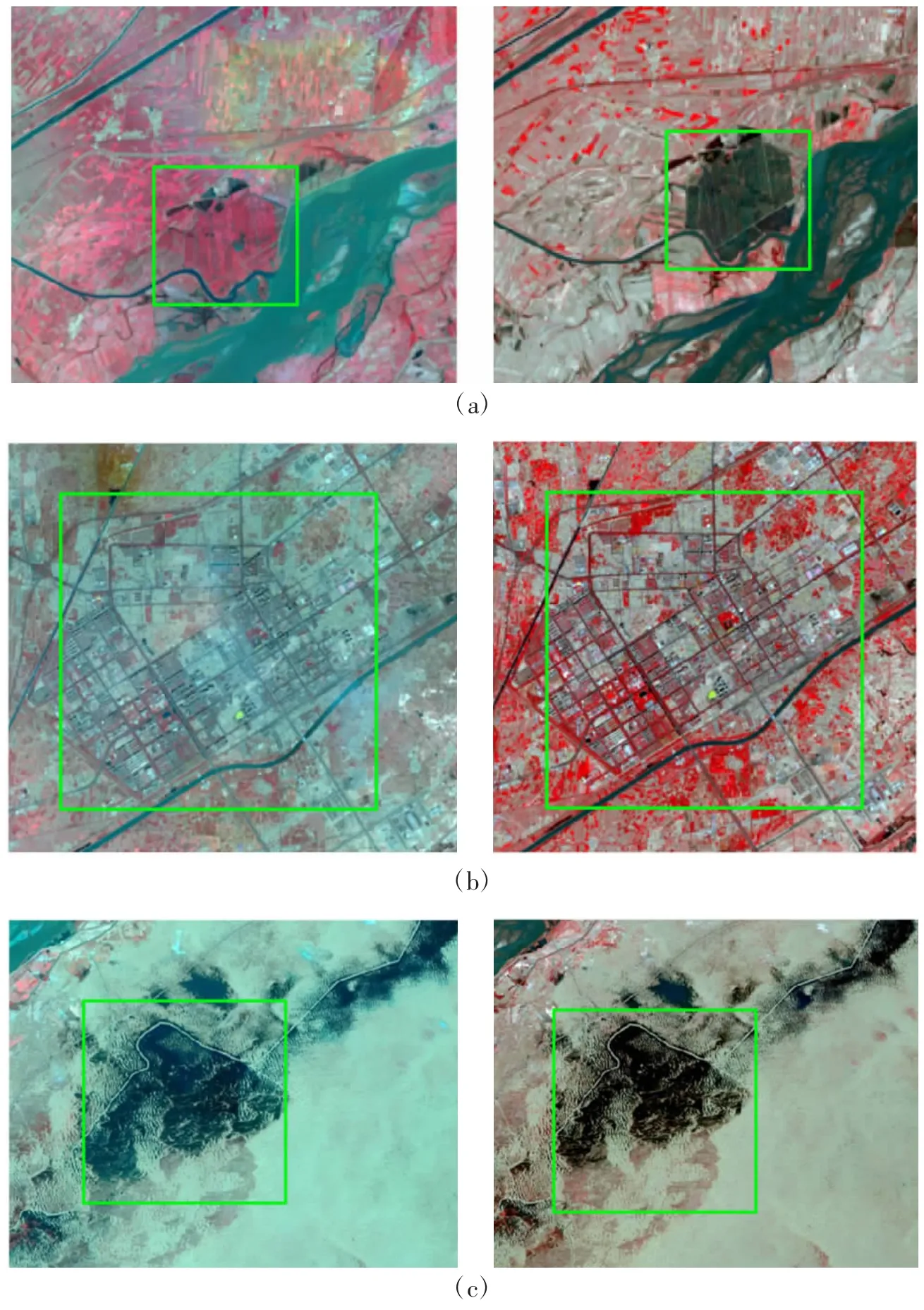
图2 ESTARFM 模型融合影像与真实影像对比
在定量分析时,对真实影像和预测影像绿、红、近红3 个波段进行R值相关性比较,绿波段相关性为0.667、红波段相关性为0.709、近红波段相关性为0.842,影像3 个波段的相关性均高于0.600(图3)。这表明ESTARFM 模型获得的预测影像与真实影像相关性较好。
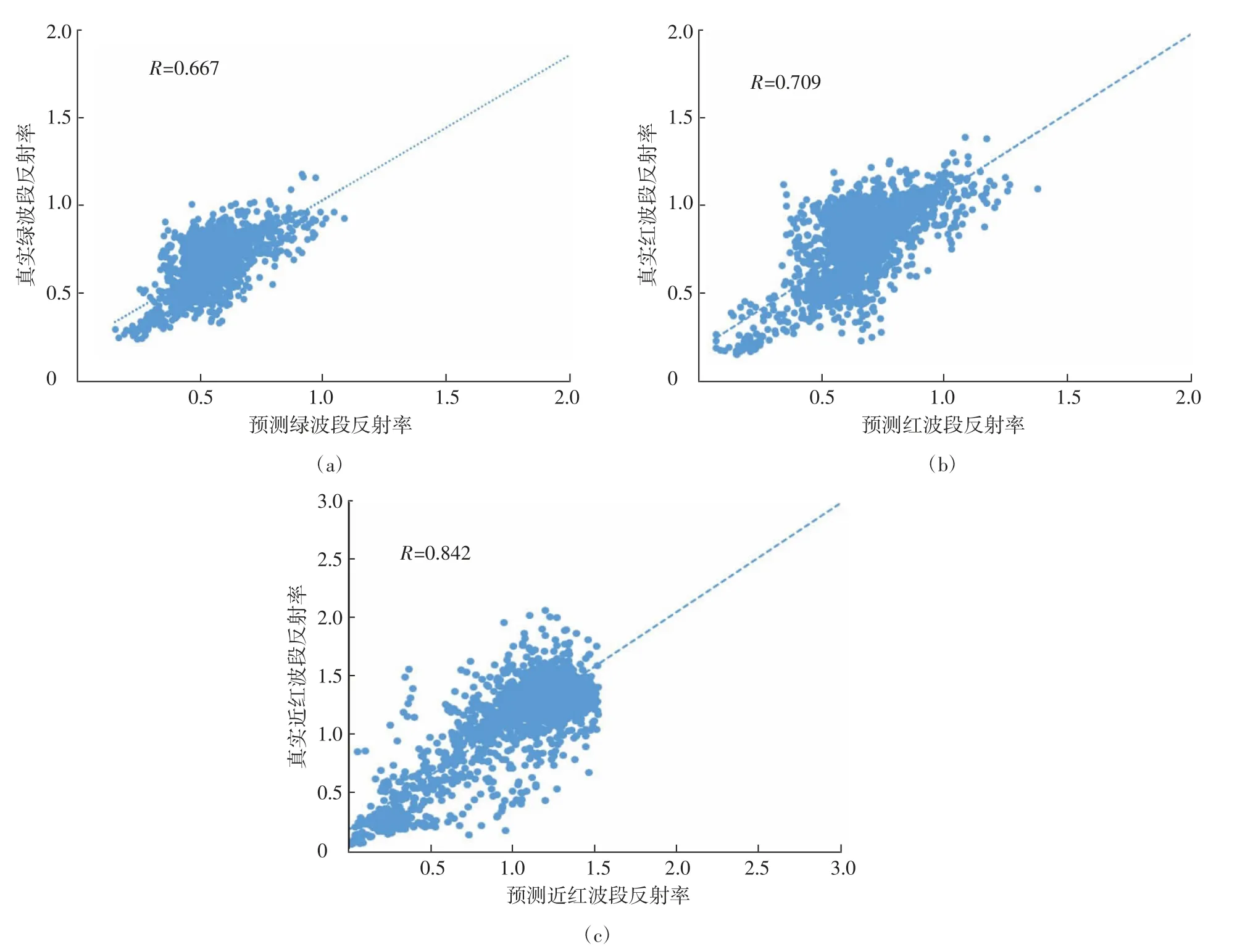
图3 Landsat 与ESTARFM 模型融合影像R 值对比
2.2 NDVI 时间序列特征分析
NDVI 时间序列数据集能够较好解决影像“椒盐”现象,有效增强植被与非植被的差异,通过NDVI 时间序列还可以准确反映农作物的生长状况及其变化情况。研究区内大部分农作物生长期在4—9月,受到重访周期、云雨天气影像影响,Landsat数据影像缺失严重,只获取3 景云量小于5%的Landsat 影像及18 景MODIS 影像。将两期Landsat数据与对应时间的两期MODIS 数据及预测期的MODIS 数据输入ESTARFM 模型分别预测18 景高时空分辨率影像,并利用影像数据中近红外波段数据和红波段数据计算NDVI 值,最后通过数据融合构建NDVI 时间序列预测影像数据集。
为验证预测NDVI 时间序列的可靠性,选取研究区内农作物样本点,构建NDVI 时间序列曲线,由图4 可知,2019年4月21日—8月27日共18 个时间序列号,经过S-G 滤波ESTARFM 农作物NDVI曲线与原始MODIS 数据NDVI 曲线的构成趋势基本一致,表明ESTARFM 模型可以用于生成高时空分辨率影像,并建立NDVI 影像数据集。
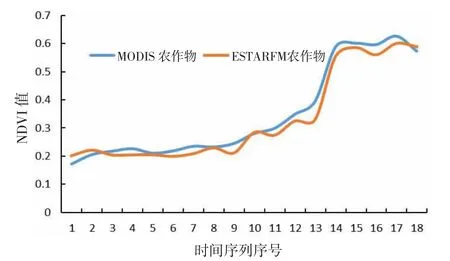
图4 农作物NDVI 随时间变化情况
2.3 农作物提取结果
随机森林法利用采集农作物解译点建立的ROI感兴区对农作物进行遥感分类,结果见图5。

图5 Landsat 真实影像与预测影像分类结果对比
利用研究区内实际采集农作物解译验证点和Google Earth 采集的样本点,结合ENVI 5.3 软件建立研究区感应区域(ROI)。利用混淆矩阵对分类结果进行精度验证。本研究共采集验证点200 个,地物类型包括春小麦、玉米、沙地、林地、水体和其他类,验证点能够均匀分布在研究区(表1)。精度评价结果显示Landsat 真实影像数据总体识别精度为80.96%,Kappa 系数0.72。Landsat 预测影像总体识别精度为93.03%,Kappa 系数0.89。预测影像识别精度高于单景真实Landsat 影像。

表1 研究区验证点ROI 个数及像元个数
3 结论与讨论
基于ESTARFM 模型,融合MODIS 与Landsat影像建立NDVI 时间序列数据集,经过数据重构,利用随机森林法进行农作物分类后,得到以下结论;(1)利用ESTARFM 模型数据融合技术,可以有效解决农作物提取关键期内影像缺失问题,对比真实影像和融合影像绿、红、近红3 个波段的相关性,其中,绿波段相关性为0.667、红波段相关性为0.709、近红波段相关性为0.842,波段间表现出较好的相关性。(2)利用ESTARFM 模型生成NDVI 时间序列曲线时,预测产生的NDVI 曲线与MODIS 影像生成的NDVI曲线变化趋势基本一致,说明ESTARFM 模型可以用于NDVI 曲线预测,并能体现NDVI 时间变化特征。(3)利用ESTARFM 模型融合的高时空分辨率影像的农作物类型识别结果可以信赖,Landsat 真实影像数据总体识别精度为80.96%,Kappa 系数0.72。Landsat 预测影像总体识别精度为93.03%,Kappa 系数0.89,基于ESTARFM模型的Landsat 预测影像数据集识别精度高于单景真实Landsat 影像。
本研究也存在很多不足,首先由于能够获得的高质量的Landsat 基础影像数量少且时间跨度较大,会影响ESTARFM 模型预测影像的质量,实例表明陈梦露等[21]在ESTARFM 模型中利用11 景Lansat8影像预测了27 景NDVI 时间序列影像,得到预测影像相关性总体在0.80 以上,提高了影像预测质量;郭娇等[22]利用ESTARFM 模型在西安地区植被覆盖度研究中采用10 景Lansat8 数据,预测45 景MODIS 数据,结果得到预测影像与真实影像相关性达到0.85以上,由此可见在数据融合研究中采用多期影像作为基础影像可以有效提升ESTARFM模型的影像预测质量。其次,研究区地物类型多样且地块破碎,利用ESTARFM 模型进行农作物类型识别时,只利用NDVI 指数可能会影响识别精度,郑丽娟[23]在农作物分类研究中,加入15 个植被指数特征和8 个纹理特征后有效提升农作物分类精度,达到96.02%。王楠[24]利用NDVI 时间序列影像在农作物种植结构提取研究中引入物候特征并进行物候分区得到农作物分类精度为均在80%以上。基于本研究中存在的不足,未来将在农作物分类研究中引入植被指数、农作物物候信息等参数以提高农作物识别精度。
