基于8AT的自动泊车系统扭矩控制策略分析
2021-08-24陈海鸥徐达学
陈海鸥,姜 灏,徐达学,樊 瑞
(奇瑞汽车股份有限公司汽车工程技术研发总院,安徽 芜湖241000)
1 引言
在智能驾驶领域,低速智能化自动泊车系统成为汽车行业发展的主流智驾功能,它融合了全景影像功能和超声波雷达功能,帮助用户找到合适的标线停车位或者边界停车位,规划合适路径自动控制车辆泊车入库或泊车出库。
逐步完善的i-VISTA中国智能汽车指数评价体系针对低速智能泊车功能也发布了智能泊车辅助试验规程和评价规程2020版,对于智能泊车的可靠性、安全性和舒适性做了详细的计分要求。
智能化自动泊车系统的应用场景属于低速行车工况,泊车车速低于用户正常驾驶的蠕行车速,基于8AT的智能化自动泊车系统,其关联件模块(如发动机模块、制动模块、转向模块等)的扭矩控制需要相互协调、匹配,才能将泊车功能鲁棒性做到最佳。扭矩控制是智能泊车系统的重点技术,而纵向控制扭矩和横向控制扭矩是扭矩控制中关键核心技术,也是智驾开发难点技术之一。
2 扭矩分析
2.1 系统架构
如图1所示为自动泊车系统的系统架构,主要包含6大组件,分别是自动泊车控制器APA、电动助力转向系统EPS、电动制动系统ESP、发动机管理系统EMS、变速器控制系统TCU、电动驻车制动系统EPB。
APA是自动泊车的核心控制器,它通过车身环境感知系统去检测车位和车身周围环境状态,给ESP发送纵向控制命令(包括油门、减速行驶以及避障制动控制),给EPS发送横向控制命令(主要是转弯曲率控制),给TCU发送挡位变换指令,给EPB发送驻车制动指令,EMS统筹分析增扭执行策略。
各关联组件的性能指标如表1所示。
2.2 纵向控制
自动泊车系统纵向控制的核心控制模块是ESP,ESP会根据APA控制器指令将其转换为驾驶员意图扭矩信息,代替驾驶员踩油门踏板的扭矩需求。
EMS发动机系统正常工作时,会产生最小燃烧扭矩,包括克服内摩擦功扭矩,以及整车电气水路或火路综合形成的扭矩大小,根据实时工况实时更新。ESP产生的虚拟意图扭矩须大于EMS的最小燃烧扭矩,才能驱动泊车。EMS会比较ESP扭矩和TCU怠速控制扭矩的大小,执行策略是取较大值。
如图2所示为自动泊车扭矩控制策略图,其中A代表ESP输出扭矩,B代表TCU输出怠速控制扭矩,如果A>B则执行ESP虚拟意图扭矩;如果A<B则执行怠速控制扭矩+EMS最小燃烧扭矩。

图1 自动泊车系统架构
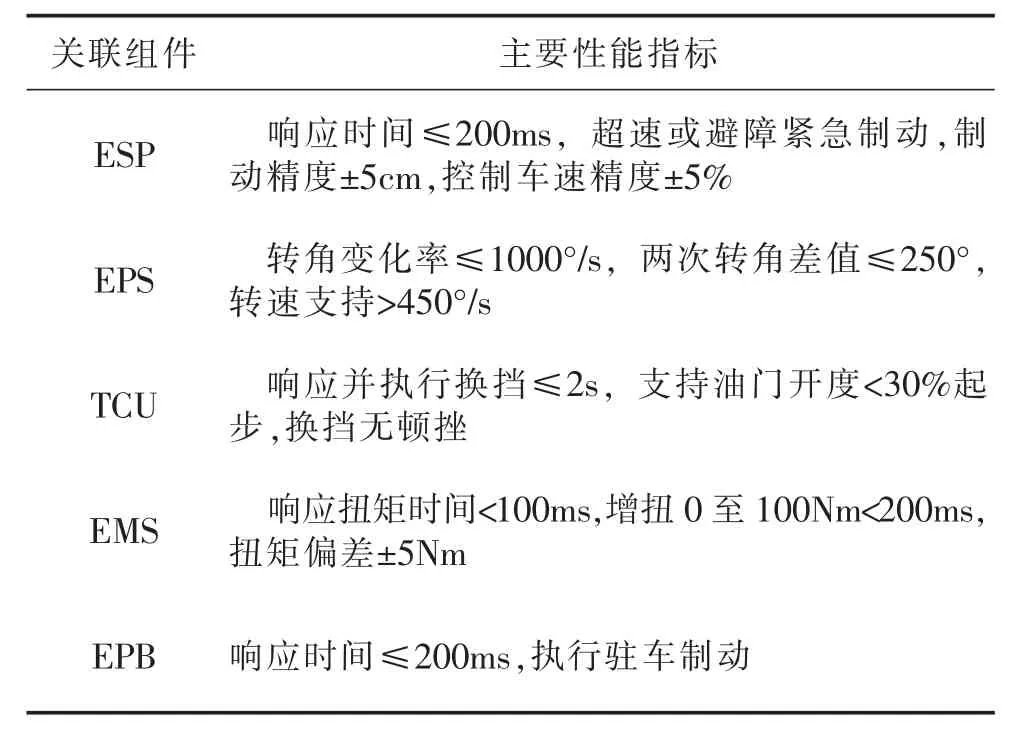
表1 自动泊车系统关联组件主要性能指标
取值确定后会加上怠速工作补偿扭矩,扭矩算法包括PID比例-积分-微分补偿差值等,以防止出现误差较大的超调量。EMS也会有一个最大燃烧扭矩,泊车系统的扭矩和最大扭矩进行比较,取较小值最为最终EMS控制扭矩输出至飞轮端。
2.3 匹配8AT扭矩分析
如图3所示为车辆轮端扭矩控制策略,图2分析了整车EMS最终燃烧控制扭矩策略,但是飞轮端还是通过8AT变速器离合器将动力传递给车轮端来确保一定扭矩供泊车工况。如图3所示是一种反推法来深入剖析纵向控制扭矩策略。
从四轮轮端扭矩考虑,驱动轮速达到某个值进行估算分析,整体四轮合成的扭矩求和作为初级目标,其传递到变速器端传动比按照Differential Ratio进行计算,不存在100%的传输比,所以会产生一定的传输损耗。

图2 自动泊车纵向控制策略

图3 匹配双离合变速器的纵向控制系统
TCU变速器的扭矩需求来源于离合器CLUTH,他们之前需要考虑车身相应附件扭矩,行车终极目标扭矩,对飞轮端提出扭矩需求。在不考虑ESP虚拟扭矩的情况下,EMS将TCU对飞轮端提出的扭矩,加上最小燃烧扭矩就可以作为EMS燃烧控制扭矩。由于泊车工况车速较低,对于离合器的有效控制也是纵向控制重点分析技术。离合器在泊车工况的状态有3种,分别为:锁止,离合器和飞轮完全贴合,传输效率接近100%;滑膜,离合器和飞轮处于半贴合状态,传输效率不足50%;脱开,离合器和飞轮完全脱离,传输效率0%。综合来说TCU的实际扭矩输入=飞轮端扭矩×扭矩传输效率,泊车车速低于正常蠕行驾驶的车速,所以离合器始终工作在滑膜状态,实时关注主缸和轮缸压力,做好贴合以及脱开、滑膜的执行工作。
2.4 横向扭矩控制
EPS是横向扭矩控制的关键核心模块,APA控制器给EPS发出转角指令,EPS内部将转角指令转换为转角扭矩,EPS内部三相异步电动机执行扭矩输出工作,帮助APA系统将轮端旋转至规划的角度,并反馈当前转角给到APA。横向扭矩控制要求见图4、表2。

图4 横向扭矩控制要求

表2 横向扭矩控制要求表
对EPS的主要技术指标有:允许连续请求的转角≤250°,请求转角的变化率≤1000°/s,出现超速、超率、超差角或者EPS内部故障时需要关闭EPS转向功能。
2.5 人为干预策略
实际在自动泊车过程中,用户因为种种原因会干预车身执行器件,如操作方向盘干预EPS横向控制功能、踩下油门踏板干预ESP纵向控制功能、操作换挡机构干预TCU挡位变更功能等。下面分别概述干预导致扭矩策略的影响。
1)用户操作方向盘
当用户操作方向盘时间持续200ms,用力超过3Nm,EPS会向APA控制器反馈用户干预泊车功能,EPS的横向扭矩控制功能退出,APA收到EPS的干预反馈和退出信号,APA自动泊车功能立刻刹停车辆、功能退出。
2)用户踩下油门踏板
APA控制器对纵向增扭控制是通过ESP向EMS发送驾驶员虚拟意图扭矩,EMS会输出一个油门踏板被踩踏的虚拟位置。当用户实际踩下油门踏板,当油门踏板转换要求EMS的输出扭矩<APA功能要求的扭矩,则不响应用户踩油门踏板的功能。但是由于APA泊车的车速很低,对踏板位置相当敏感,用户踩下一定位置会超出APA虚拟扭矩意图需求值。所以正常情况下,用户踩下后APA会获悉油门踏板被踩下,及时刹停车辆、功能退出。
3)用户操作挡位
APA会通过ESP给TCU发送挡位变换请求,TCU根据指令换挡。但是如果用户主动操作挡位变更,并且和APA指令挡位不是用一个,那么TCU会反馈用户干预了挡位,TCU即刻退出APA泊车自动换挡功能。APA获悉后及时刹停车辆、功能退出。
综上几个干预问题说明,APA泊车是全自动化的规控方式,无须用户操作任何执行器。而当用户主动干预相关执行器时,关联组件及时反馈干预说明,并及时退出APA功能,保证泊车功能的安全性和鲁棒性。
3 结束语
扭矩控制是自动泊车功能开发中的关键核心问题,策略的应用还需要实际调测和标定过程确认,实时微调技术方案确保泊车功能的安全性和可靠性。
本文结合实际整车开发项目经验,分析了基于8AT变速器的纵向横向控制策略及系统架构,可作为开发此类系统的参考。
