一种滚转角稳定控制系统设计方法
2021-08-23王刚杜亚雯董全林
王刚 杜亚雯 董全林


摘 要: 为解决滚转角稳定控制系统设计参数难以选取的问题,提出一种新的设计方法。在动力学建模与误差分析的基础上,根据滚转通道的特点对闭环特征方程进行了简化。利用传递函数标准型将控制系统设计问题转化为参数优化问题, 给出了利用遗传算法综合设计指标、优化计算参数的方法。算例表明,利用遗传算法设计的滚转角稳定控制系统具有良好的性能。
关键词:滚转角稳定控制系统;控制器设计;参数优化;传递函数标准型;遗传算法
中图分类号:TJ765.2 文献标识码: A 文章编号:1673-5048(2021)03-0109-06
0 引 言
一般来说,轴对称导弹的横向静稳定度很小,产生的恢复力矩也很小。弹体外形的不对称会产生滚转力矩,在飞行的初始阶段,滚转角速度有增大的趋势,阻尼力矩也随之增大,直到与滚转力矩平衡为止,导弹保持一定的滚转角速度,滚转角的趋势是发散的[1]。
对于采用侧滑转弯(STT)三通道控制的导弹来说,保持飞行过程中滚转角在0°附近能够减少俯仰、偏航通道的交叉耦合,实现三通道分离设计[2]。
舵机的指标也与滚转通道密切相关。为使三通道控制正常工作,滚转驾驶仪应设计得比侧向驾驶仪快,舵机的带宽、最大角速度等指标主要取决于滚转通道。
对于垂直发射的导弹,为了实现全向快速转弯,通常控制系统首先需要进行滚转角稳定控制,使弹体纵对称面与发射平面重合[3]。
在进行滚转角稳定控制系统设计时,难点是确定设计参数的取值。通常在设计时将内外回路分离[4],利用根轨迹法分别设计阻尼回路与位置回路的参数。这一过程较复杂,且难以获得最优设计参数。传统的参数设计方法通常不考虑舵机动力学或将舵机视为简单的1阶环节[5],这样得到的设计参数受舵机性能的影响较大。当舵机延迟较大时,控制回路可能会产生大幅振荡甚至失稳。本文在设计时将舵机视为二阶系统,这更接近于舵机的动力学模型情况。针对设计参数难以选取的问题,本文利用传递函数标准型引入计算参数,将控制器设计问题转化为计算参数优化问题。计算参数有清晰的物理意义及确定的取值范围,与系统闭环特征根位置及动态性能密切相关,更加便于进行控制器的设计。本文详细介绍了利用遗传算法对计算参数进行全局寻优的方法,包括参数编码方式、适应度函数、约束函数的选取以及遗传操作过程等,这是在工程上非常实用的方法。
1 滚转角稳定控制系统模型
1.1 滚转通道动力学模型
不考虑干扰力矩时,滚转通道动力学方程表示为[6]
γ¨=-cωγ·-cδδx(1)
式中:γ·为滚转角速度; γ¨为滚转角加速度;cω 为由滚转角速度产生的滚转阻尼力矩,其表达式为cω=-MωxxJx, Mωxx<0,cω>0;cδ 为由副翼舵偏角产生的滚转操纵力矩,cδ=MδxxJx,若规定正的副翼舵偏角产生负的滚转控制力矩,则,Mδxx<0, cδ>0;δx为副翼舵偏角。
根据式(1)得到由副翼舵偏角到滚转角速度的传递函数为
γ·(s)δx(s)=krTrs+1(2)
式中:kr是传递函数的稳态增益,kr=-cδcω,kr<0;Tr是
动力学时间常数,Tr=1cω。
根据舵机模型及其动力学模型可得到被控对象传递函数框图如图1所示。
其中:δxc为副翼舵指令;ks为舵机增益,根据前文的规定,ks=-1;ωs为舵机频率;ξs为舵机阻尼比;δxa为舵机输出的副翼舵偏角;δB为干扰力矩等效的舵偏角,δB=LMδxx,L为干扰力矩,Mδxx为舵机效率。
根据图1,可得滚转角输出和副翼舵指令之间的传递函数为
γδxc=kss2ω2s+2ξsωss+1 krTrs+1 1s(3)
该传递函数是控制系统开环传递函数的一部分。由式(3)可知,控制系统固有环节的相角滞后已接近180°,系统的相角裕度不大,设计稳定控制系统需要设法增加相角超前环节[7]。
1.2 控制系统框图
常见的三通道控制导弹上均装有三轴速率陀螺,可以通过速率陀螺测量的滚转角速度作为反馈信号,构成闭环控制系统来提高系统的相角裕度。根据被控对象传递函数可以得出转速反馈闭环控制系统,如图2所示[8]。
图中:Kγ·为阻尼回路增益;Gk(s)为位置环控制器。
尽管目前智能控制算法已经得到廣泛的应用,但是
在导弹的工程实践中,还是以经典控制为主。本文以工程实践为背景,选择PID控制。常用的位置环控制器有P控制器与PI控制器两种。
P控制器:Gk(s)=Kγ,Kγ为比例环节增益。
PI控制器:Gk(s)=Kγ1+KIs,KI为积分环节增益。
要设计的参数就是Kγ,Kγ·,KI。
2 设计指标及误差分析
2.1 控制器设计指标
滚转角稳定控制系统的任务主要是消除因干扰产生的滚转角误差,保持执行坐标系与测量坐标系间的相位关系。
滚转角稳定控制系统的主要设计指标包括:
(1)允许的最大滚转角偏差为1°,
指在各种干扰作用下,系统允许的最大滚转角误差;
(2)误差角消除时间为te≤0.4 s,
指消除70%的最大滚转角误差所需的时间;
(3)稳定性:相位裕度不小于45°,幅值裕度不小于6 dB。
2.2 误差分析
滚转角稳定控制系统指令跟踪性能一般不是考虑的重点,设计时应着重考虑干扰力矩对滚转角误差的影响[9],因此,控制系统输入选取干扰舵偏角δB,输出选取Δγ或γ。实际上,由于指令为0,Δγ与γ是反向的,无论选哪个变量做输出,不影响分析结论。为更具一般性,采用PI控制器进行分析。由图2可得,从干扰到误差的传递函数:
en=Δγ(s)δB(s)=
-krs(Trs+1)
1+kss2ω2s+2ξsωss+1krTrs+1
Kγ·+Kγ1+KIs1s
(4)
根据终值定理,干扰为单位阶跃时的稳态误差为
essn=lims0sen1s=lims01ksKγ+ksKγKIs
(5)
采用PI控制器时,由于控制器积分项的存在,essn=0,系统没有原理性稳态误差,最终的稳态误差为0。但是,这并不意味着系统最大滚转角误差满足指标要求。当干扰舵偏角加入系统后,系统会产生滚转角误差,最大误差近似为
essn=-1ksKγ=1Kγ(6)
随着积分环节开始作用,误差逐步消除,最终为0。
如果采用P控制器,稳态误差表达式与式(6)相同。然而采用P控制器,控制系统是一个有差系统。
假设导弹飞行过程中,可能出现的最大干扰力矩为L,等效的干扰舵偏角输入为δB=LMδxx,对应的稳态误差应满足指标要求,LMδxx1Kγ≤157.3, 则有
Kγ≥57.3LMδxx(7)
可见,只要选择足够大的位置环增益,采用比例控制能够满足稳态误差要求。实际设计过程中,可根据式(7),确定设计参数Kγ的取值下限。
2.3 设计参数与性能指标的关系
控制系统的设计参数包括:KI、Kγ与Kγ·,设计参数与系统指标的关系如下:
(1) 由式(6)可知,Kγ决定了系统在干扰输入情况下可能出现的最大滚转角误差和误差角消除时间;
(2) 由式(5)可知,KIKγ之积决定了控制器积分项消除滚转角偏差的速度,与误差角消除时间指标密切相关;
(3) 由图2可知,Kγ·为系统带来了超前反馈,决定了系统的稳定性,与稳定性指标密切相关。
3 控制器设计及参数优化
3.1 控制器设计问题的转化
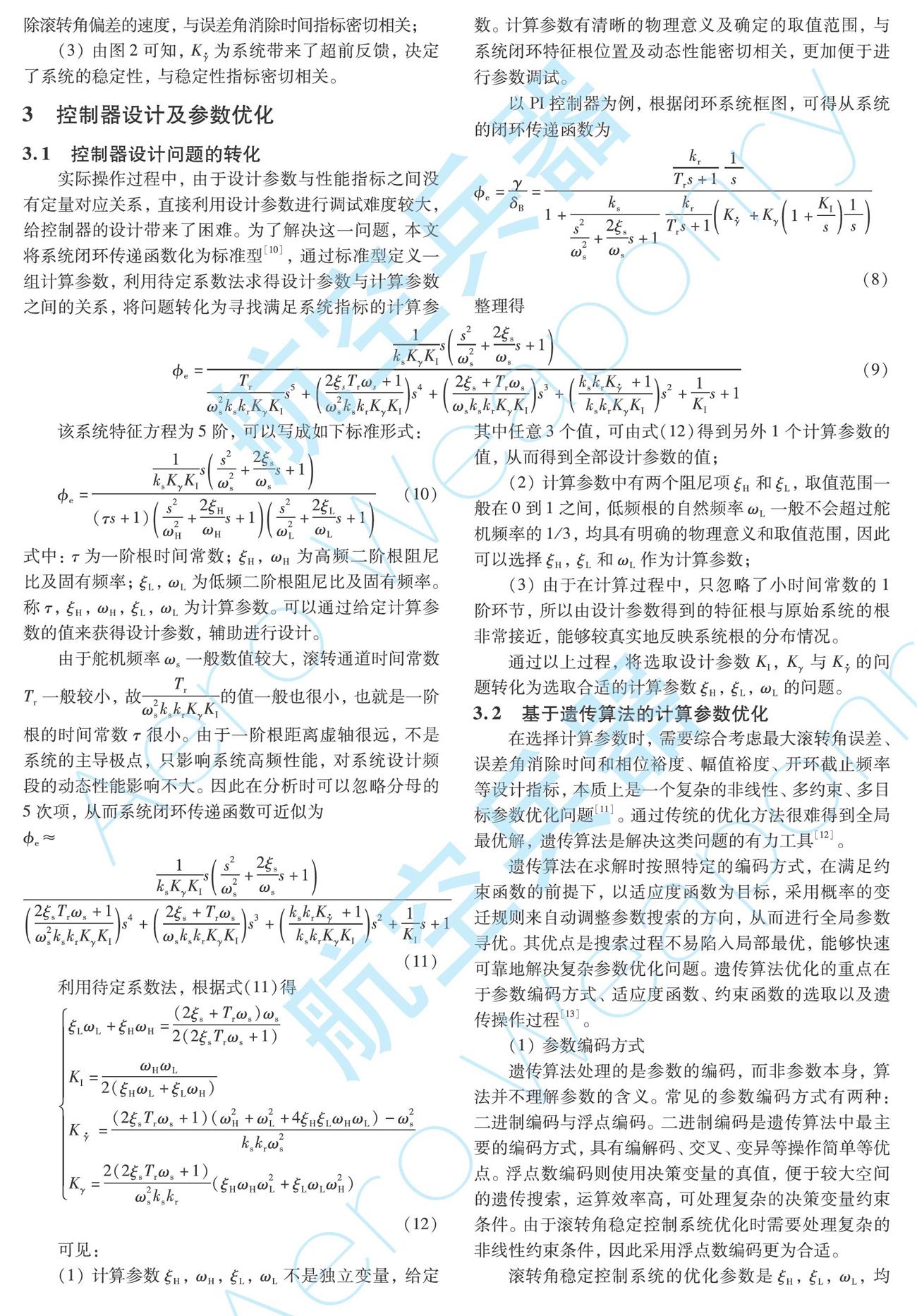
实际操作过程中,由于设计参数与性能指标之间没有定量对应关系,直接利用设计参数进行调试难度较大,给控制器的设计带来了困难。为了解决这一问题,本文将系统闭环传递函数化为标准型[10],通过标准型定义一组计算参数,利用待定系数法求得设计参数与计算参数之间的关系,将问题转化为寻找满足系统指标的计算参数。计算参数有清晰的物理意义及确定的取值范围,与系统闭环特征根位置及动态性能密切相关,更加便于进行参数调试。
以PI控制器为例,根据闭环系统框图,可得从系统的闭环传递函数为
(10)
式中:τ为一阶根时间常数;ξH,ωH为高频二阶根阻尼比及固有频率;ξL,ωL为低频二阶根阻尼比及固有频率。称τ,ξH,ωH,ξL,ωL为计算参数。可以通过给定计算参数的值来获得设计参数,辅助进行设计。
由于舵机频率ωs一般数值较大,滚转通道时间常数Tr一般较小,故Trω2skskrKγKI的值一般也很小,也就是一阶根的时间常数τ很小。由于一阶根距离虚轴很远,不是系统的主导极点,只影响系统高频性能,对系统设计频段的动态性能影响不大。因此在分析时可以忽略分母的5次项,从而系统闭环传递函数可近似为
可见:
(1) 计算参数ξH,ωH,ξL,ωL不是独立变量,给定其中任意3个值,可由式(12)得到另外1个计算参数的值,从而得到全部设计参数的值;
(2) 计算参数中有两个阻尼项ξH和ξL,取值范围一般在0到1之间,低频根的自然频率ωL一般不会超过舵机频率的1/3,均具有明确的物理意义和取值范围,因此可以选择ξH,ξL和ωL作为计算参数;
(3) 由于在计算过程中,只忽略了小时间常数的1阶环节,所以由设计参数得到的特征根与原始系统的根非常接近,能够较真实地反映系统根的分布情况。
通过以上过程,将选取设计参数KI,Kγ与Kγ·的问题转化为选取合适的计算参数ξH,ξL,ωL的问题。
3.2 基于遗传算法的计算参数优化
在选择计算参数时,需要综合考虑最大滚转角误差、误差角消除时间和相位裕度、幅值裕度、开环截止频率等设计指标,本质上是一个复杂的非线性、多约束、多目标参数优化问题[11]。通过传统的优化方法很难得到全局最优解,遗传算法是解决这类问题的有力工具[12]。
遗传算法在求解时按照特定的编码方式,在满足约束函数的前提下,以适应度函数为目标,采用概率的变迁规则来自动调整参数搜索的方向,从而进行全局参数寻优。其优点是搜索过程不易陷入局部最优,能够快速可靠地解决复杂参数优化问题。遗传算法优化的重点在于参数编码方式、适应度函数、约束函数的选取以及遗传操作过程[13]。
(1) 参数编码方式
遗传算法处理的是参数的编码,而非参数本身,算法并不理解参数的含义。常见的参数编码方式有两种:二进制编码与浮点编码。二进制编码是遗传算法中最主要的编码方式,具有编解码、交叉、变异等操作简单等优点。浮点数编码则使用决策变量的真值,便于較大空间的遗传搜索,运算效率高,可处理复杂的决策变量约束条件。由于滚转角稳定控制系统优化时需要处理复杂的非线性约束条件,因此采用浮点数编码更为合适。
滚转角稳定控制系统的优化参数是ξH,ξL,ωL,均有确定的取值范围,一般来说,ξL>0, ξH<1,0<ωL<ωs/3。进行参数优化时,为提高搜索效率,需要对参数进行归一化处理,由于ξH,ξL取值范围已在(0,1)区间,因此,只需对ωL进行归一化处理即可,将3ωL/ωs作为优化参数计算。
(2) 适应度函数选取
适应度函数是遗传算法优化的目标函数,遗传算法按照使适应度函数最小的方向进行参数寻优,因此,适应度函数在选择时需要综合考虑多个设计指标,本质上是一个多目标优化问题[14]。
最大滚转角偏差指标与设计参数Kγ密切相关,近似呈反比;误差角消除时间指标与设计参数KγKI乘积密切相关,KγKI越大,积分环节的增益越大,会产生更大的控制信号,更快地消除误差。
适应度函数在选取时可综合考虑这两个指标,在满足稳定裕度与截止频率的前提下,选取尽量大的Kγ和KI值,通过构造合适的权重系数,可将多目标优化问题转化为单目标优化问题[15]。适应度函数可以选择为
u=k1Kγ+k2KγKI
k1<0
k2<0 (13)
(3) 约束函数选取
约束函数是遗传算法参数寻优过程中必须满足的等式或不等式关系,在本例中,可将幅值裕度、相角裕度和截止频率等要求用约束函数来处理,滚转角稳定控制系统的非线性约束条件可以表示为
6-Gm≤0
45-Pm≤0
ωCR-ωs/3≤0
1-ωCR≤0 (14)
式中:Gm为幅值裕度;Pm为相角裕度;ωCR为截止频率;ωs为舵机频率。
(4) 遗传操作
a. 创建初始种群。
创建由50个成员组成的初始种群,生成初始种群时,设置合适的范围可提高遗传算法的搜索效率。根据滚转角稳定控制系统的特点,将初始种群ξH, ξL参数限制在0.5附近,3ωL/ωs限制在0.3附近。
b. 计算种群个体的适应度值,根据适应度值为每个成员打分。
为避免初始种群界限的影响,保持种群的多样性,为成员打分时依据适应度值排序,取排序后成员在队列中的序号作为其得分,种群中最适应的个体得分为1,第2名得分为2,以此类推。
c. 选择父辈进行遗传操作产生子辈。
根据每个成员的得分值,采用随机均匀函数法选择父辈,进行遗传操作产生子辈,遗传操作包括:
复制:将父辈的基因直接遗传到子辈,这些成员称为精英子辈。为防止算法早衰,进行优化时,仅将排名前3的父辈基因直接遗传给精英子辈。
交叉:将两个父辈的某些基因进行交换形成子辈,使得子辈从不同的父辈中遗传优良基因,这是遗传算法的主要操作。进行优化时,约80%的子辈由交叉生成,交叉的方法采用两点法。
变异:由一个父辈在某些基因位随机变异产生子辈,变异可以使遗传算法具备一定的随机性,能够保持种群的多样性,在更大的搜索空间寻优。优化时采用的方法是将一个高斯分布的随机数加到父辈向量的每一项上,为使算法收敛,每一代的变异子辈的数量将逐渐减少。
d. 用子辈形成新种群,继续进行遗传操作。
e. 算法收敛后退出操作,得到最优解。
4 仿真验证
某正常式布局导弹动力学系数为:cω=226.48 s-1,cd=4 496.62 s-2;舵机动力学参数為:ωs=62.8 rad/s,ks=-1,ξs=0.7。
采用遗传算法进行参数优化,为提高搜索效率,根据滚转角稳定控制回路特点对初始参数取值范围进行限制,令ξL>0.49, ξH<0.51, 0.29<3ωL/ωs<0.31。优化时,参数的取值范围设为:ξL>0, ξH<1,0<3ωL/ωs<1;
适应度函数选为:u=-170Kγ-KγKI; 约束函数选为
6-Gm≤0
45-Pm≤0
ωCR-20≤0
1-ωCR≤0
(15)
计算参数优化的结果:ξH=0.542,ξL=0. 603,ωL=12.57。适应度函数与计算参数的变化如图3~6所示。
与计算参数对应的设计参数值为:KI=8.674 1,Kγ·=0.024 4,Kγ=1.013。利用Simulink建立系统模型并完成仿真,可得系统单位阶跃响应如图7所示,舵信号如图8所示,开环波特图如图9所示,系统闭环零、极点如图10所示。
仿真结果表明:滚转角稳定控制系统的设计的最大误差角不超过0.8°,误差角消除时间约0.25 s,相角裕度61.4°,幅值裕度17.9 dB,具有良好的性能。
5 结 论
对于采用STT控制、三通道分离设计的导弹来说,滚转角稳定控制系统的作用主要是消除干扰力矩引起的误差角,控制系统设计的难点在于确定设计参数取值。利用传递函数标准型引入计算参数,可以将控制系统设计问题转化为计算参数优化问题。计算参数物理概念清晰,有确定的取值范围,利用遗传算法可快速获得近似最优解。算例表明,利用这种方法设计的滚转角稳定控制系统具有良好的性能。
参考文献:
[1] 钱杏芳,林瑞雄,赵亚男. 导弹飞行力学[M]. 北京:北京理工大学出版社,2011.
Qian Xingfang,Lin Ruixiong,Zhao Yanan. Missile Flight Mecha-nics[M]. Beijing:Beijing Institute of Technology Press,2011.(in Chinese)
[2] 张跃,段镇. 轴对称飞行器滚转稳定控制与舵机技术指标[J].光学精密工程,2010,18(1):100-107.
Zhang Yue,Duan Zhen. Roll Stable Control and Rudders Technologic Parameters of Axisymmetric Aircrafts[J]. Optics and Precision Engineering,2010,18(1):100-107. (in Chinese)
[3] 史绍琨,赵久奋,王海峰. 垂直发射导弹弹体全方位最速滚转控制率设计[J].战术导弹技术,2018(1):92-97.
Shi Shaokun, Zhao Jiufen, Wang Haifeng. Design of Omnidirectional Steepest Roll Control Law for Vertical Launching Missile[J]. Tactical Missile Technology,2018(1):92-97.(in Chinese).
[4] 刘兴堂.精确制导、控制与仿真技术[M]. 北京:国防工业出版社,2006.
Liu Xingtang. Precision Guidance,Control and Simulation Techno-logy[M]. Beijing:National Defense Industry Press,2006. (in Chinese)
[5] 林德福,王辉,王江,等. 战术导弹自动驾驶仪设计与制导律分析[M]. 北京:北京理工大学出版社,2012.
Lin Defu,Wang Hui,Wang Jiang,et al. Autopilot Design and Guidance Law Analysis for Tactical Missiles[M]. Beijing:Beijing Institute of Technology Press,2012.(in Chinese)
[6] Qi Z K, Xia Q L. Guided Weapon Control System[M]. Beijing:Beijing Institute of Technology Press,2004.
[7] DAzzo J J,Houpis C H,Sheldon S N. Linear Control System Analysis and Design with MATLAB[M]. 5th ed. New York:Marcel Dekker,2003.
[8] 杨明,汤祁忠,韩磊. 野战火箭制导与控制技术[M]. 北京:国防工业出版社,2015.
Yang Ming,Tang Qizhong,Han Lei. Guidance and Control Technology of Field Rocket [M]. Beijing:National Defense Industry Press,2015. (in Chinese)
[9] 王良明,韩珺礼,陈志华,等. 野战火箭飞行力学[M]. 北京:国防工业出版社,2015.
Wang Liangming, Han Junli, Chen Zhihua, et al. Flight Dynamics of Field Rocket [M]. Beijing:National Defense Industry Press,2015. (in Chinese)
[10] 尾行克彥. 现代控制工程 [M].4版. 卢伯英,于海勋,译. 北京:电子工业出版社,2003.
Katsuhiko Ogata. Modern Control Engineering [M]. 4th ed. Translated by Lu Boying,Yu Haixun. Beijing:Publishing House of Electronics Industry,2003.(in Chinese)
[11] 于秀萍,刘涛. 制导与控制系统[M]. 哈尔滨:哈尔滨工程大学出版社,2014.
Yu Xiuping,Liu Tao. Guidance and Control System [M]. Harbin:Harbin Engineering University Press,2014. (in Chinese)
[12] 雷英杰,张善文,李续武,等. MATLAB遗传算法工具箱及应用[M]. 2版. 西安:西安电子科技大学出版社,2014.
Lei Yingjie,Zhang Shanwen,Li Xuwu,et al. MATLAB Genetic Algorithm Toolbox and Application [M]. 2nd ed. Xian:Xidian University Press,2014. (in Chinese)
[13] 符文星,朱苏朋. 导弹计算机智能控制系统[M]. 北京:科学出版社,2018.
Fu Wenxing,Zhu Supeng. Missile Computer Intelligent Control System[M]. Beijing:Science Press,2018. (in Chinese)
[14] 包子阳,余继周,杨杉. 智能优化算法及其MATLAB实例 [M]. 2版. 北京:电子工业出版社,2018.
Bao Ziyang,Yu Jizhou,Yang Shan. Intelligent Optimization Algorithm and MATLAB Example [M]. 2nd ed. Beijing:Publishing House of Electronics Industry. (in Chinese)
[15] 冯宪彬,丁蕊. 改进型遗传算法及其应用[M]. 北京:冶金工业出版社,2016.
Feng Xianbin,Ding Rui. Improved Genetic Algorithm and Its Application[M]. Beijing:Metallurgical Industry Press,2016. (in Chinese)
A Design Method of Roll Angle Stability Control System
Wang Gang1, Du Yawen2, Dong Quanlin2*
(1. Jiangnan Industries Group Co. Ltd., Changsha 410205, China;
2. School of Instrumentation Science and Opto-Electronics Engineering,Beihang University,Beijing 100191, China)
Abstract: To solve the problem of difficult selection of design parameters for roll angle stability control system, a new design method is proposed. On the basis of dynamic modeling and error analysis, the closed-loop characteristic equation is simplified according to the characteristics of roll channel. The standard form of transfer function is used to convert the control system design problem to parameter optimization problem. The method of synthesizing design indexes and optimizing design parameters by using genetic algorithm is given. Example shows that the roll angle stability control system designed by genetic algorithm has good performance.
Key words: roll angle stability control system;controller design;parameter optimization;standard form of transfer function;genetic algorithm
收稿日期:2019-06-01
作者簡介:王刚(1981-),男,河北高阳人,高级工程师,研究方向为导弹制导控制系统设计。
通讯作者:董全林(1964-),男,黑龙江齐齐哈尔人,教授,博士生导师,研究方向为超显微仪器技术、惯性导航与制导。
