基于JSBSim的通用空中目标机动仿真模型设计及实现
2021-08-23郭亚军丁华杨登泰周兴栋
郭亚军 丁华 杨登泰 周兴栋


摘 要: 为解决空空导弹试验鉴定数字仿真中目标模型机动样式少、 可扩展性差的问题,本文开展了六自由度空中目标机动仿真模型的设计和实现。设计了不同目标机动方式下的法向过载、 切向过载、 滚转角过载控制律模型;设计了从三个通道过载解算飞机升降舵、 副翼及油门杆操纵指令之间关系的控制模型;基于开源、 开放的飞行动力学模型框架JSBSim开展目标机动仿真模型的实现。研究的仿真模型应用于某型空空导弹鉴定的全数字仿真试验中,比对结果表明,目标模型的仿真机动轨迹与预期机动样式及机动参数较为吻合。
关键词:空中目标;机动仿真模型;控制律;JSBSim;试验鉴定
中图分类号:TJ765.4 文献标识码: A 文章编号:1673-5048(2021)03-0077-06
0 引 言
机载制导武器试验鉴定越来越倾向于采用“实装与仿真相结合”的方式进行,尤其随着建模理论和计算机技术的不断提高,仿真试验在武器战术技术指标考核评定中的权重越来越大[1-4]。构建高置信度的空中目标模型,是确保导弹制导精度、 单发杀伤概率、 抗干扰成功概率等指标客观公正评价的基础。受认识水平和仿真系统软硬件条件限制,原空空导弹试验鉴定全数字仿真系统采用简化的三自由度目标运动模型,目标类型少、 机动样式少、 可扩展性差,无法模拟敌先进作战飞机的机动特性。为提高试验鉴定的置信度,满足新型空空导弹仿真试验与结果评定要求,需研究开发六自由度空中目标机动模型。
传统的飞机机动仿真通常采用六自由度刚体动力学模型,通过输入驾驶杆或舵面操纵量实现飞机的机动飞行。试验鉴定仿真是基于目标机动动作样式和动作参数确定条件下的仿真,对于目标飞机的仿真实现而言,若使用飞机六自由度刚体动力学模型,就需要根据给定的机动要求解算出目标飞机的发动机油门和驾驶杆的操纵量,是解方程的逆问题。国内相关研究院所对飞机六自由度刚体动力学模型的研究探索有很多,文献[5-6]介绍了以飞机法向过载、 切向过载、 滚转角为输入参数的飞机动力学模型,实现了基于预期机动的飞机仿真模型,可满足空战战术和战法研究,但该方法存在飞机动力学模型过于简化、 置信度较低、 通用性较差等问题。文献[7-10]设计了飞行机动指令生成器和机动指令跟踪器,可较好实现一些典型机动飞行。文献[11]建立了目标飞机飞行运动模型和基本飞行机动控制方法,并设计了目标飞机进攻、 防御战术机动动作,但上述机动实现都是基于飞机三自由度模型。本文在上述文献模型设计方法的基础上,基于飞机六自由度模型,按照满足灵活快捷改变目标类型、 机动样式等试验仿真需要,设计不同机动样式的过载控制律模型,建立法向过载、 切向过载、 滚转角与飞机升降舵、 副翼及油门杆操纵指令之间的自动控制关系,并基于开源、 开放的飞行动力学JSBSim模型框架进行仿真实现。
1 总体思路及设计实现
1.1 总体思路
空空导弹试验鉴定仿真需要模拟空战过程敌机的一系列逃逸动作,例如某导弹仿真试验条件要求目标机“弹目距离5 km后做跃升半滚+下滑倒转”。由此可见,试验仿真所需的目标机动仿真模型输入条件是目标机动动作想定(机动策略),输出值是目标的六自由度运动参数。而六自由度的机动仿真模型以飞机运动学方程和推
力模型作为支撑,需要把机动要求转化为六自由度刚体动力学模型所需的发动机推力和舵面操纵量。
JSBSim是一种开源的、 支持多平台的、 由数据驱动的通用飞行动力学模型框架[12-13],其本质上是一个物理/数学模型,模型框架的“类”之间类似于一个树形结构,如图1所示。
飞行动力学模型框架JSBSim采用面向对象的C++语言编写,定义了飞机在受到控制装置的力和力矩以及自然力作用下产生的运动,其使用经典的系数构造法建模气动力和力矩,数据由脚本文件和各种飞机的配置文件输入,通过XML建模技术实现对不同机型的仿真。JSBSim模块可独立运行,也可以集成在相关系统的飞行器中运行[14-16],为实现目标机动仿真提供了便利。
1.2 设计实现
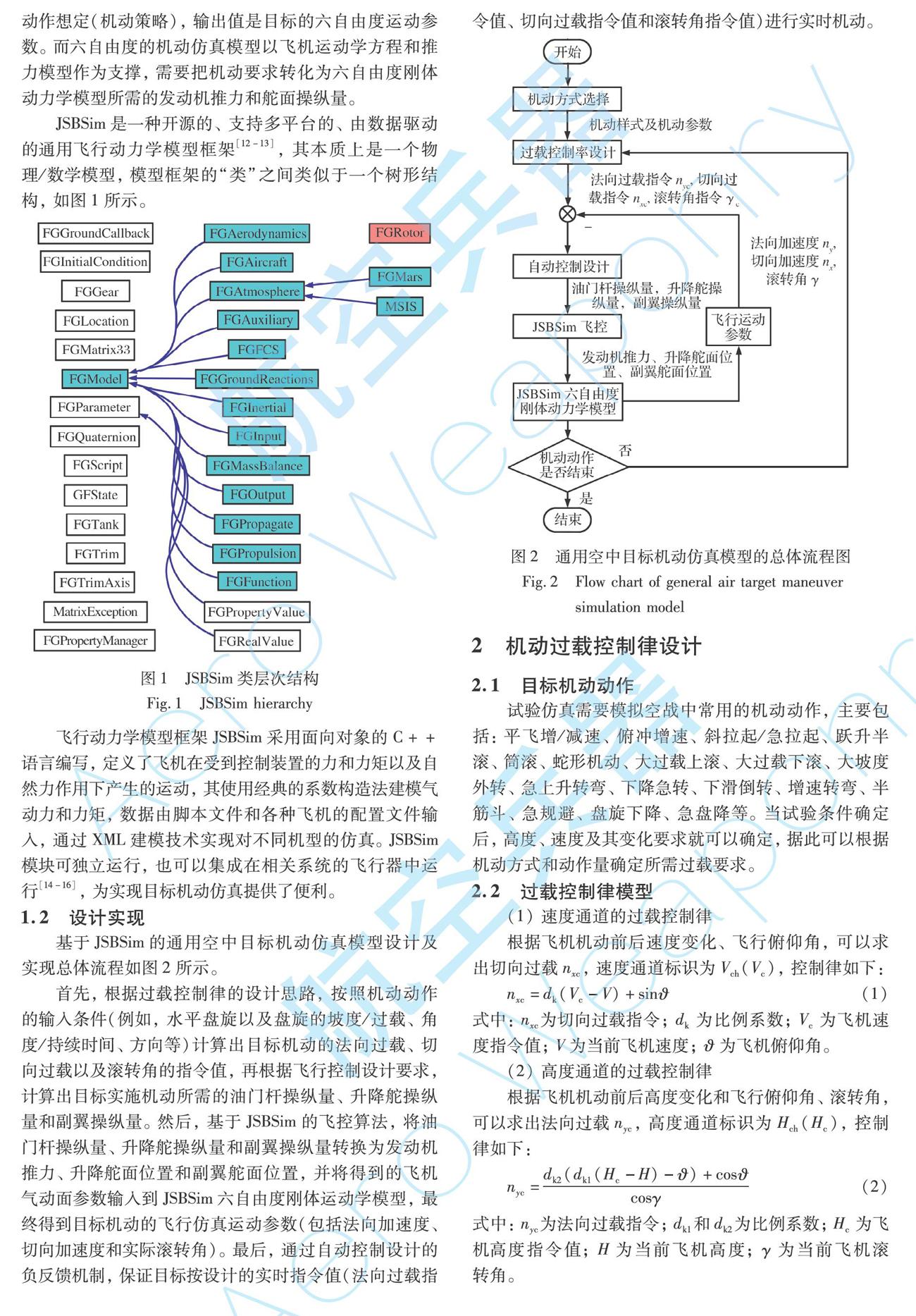
基于JSBSim的通用空中目标机动仿真模型设计及实现总体流程如图2所示。
首先,根据过载控制律的设计思路,按照机动动作的输入条件(例如,水平盘旋以及盘旋的坡度/过载、 角度/持续时间、 方向等)计算出目标机动的法向过载、 切向过载以及滚转角的指令值,再根据飞行控制设计要求,计算出目标实施机动所需的油门杆操纵量、 升降舵操纵量和副翼操纵量。然后,基于JSBSim的飞控算法,将油门杆操纵量、 升降舵操纵量和副翼操纵量转换为发动机推力、 升降舵面位置和副翼舵面位置,并将得到的飞机气动面参数输入到JSBSim六自由度刚体运动学模型,最终得到目标机动的飞行仿真运动参数(包括法向加速度、 切向加速度和实际滚转角)。最后,通过自动控制设计的负反馈机制,保证目标按设计的实时指令值(法向过载指令值、 切向过载指令值和滚转角指令值)进行实时机动。
2 机动过载控制律设计
2.1 目標机动动作
试验仿真需要模拟空战中常用的机动动作,主要包括:平飞增/减速、 俯冲增速、 斜拉起/急拉起、 跃升半滚、 筒滚、 蛇形机动、 大过载上滚、 大过载下滚、 大坡度外转、 急上升转弯、 下降急转、 下滑倒转、 增速转弯、 半筋斗、 急规避、 盘旋下降、 急盘降等。当试验条件确定后,高度、 速度及其变化要求就可以确定,据此可以根据机动方式和动作量确定所需过载要求。
2.2 过载控制律模型
(1) 速度通道的过载控制律
根据飞机机动前后速度变化、 飞行俯仰角,可以求出切向过载nxc,速度通道标识为Vch(Vc),控制律如下:
nxc=dk(Vc-V)+sin(1)
式中:nxc为切向过载指令;dk为比例系数;Vc为飞机速度指令值;V为当前飞机速度;为飞机俯仰角。
(2) 高度通道的过载控制律
根据飞机机动前后高度变化和飞行俯仰角、 滚转角,可以求出法向过载nyc,高度通道标识为Hch(Hc),控制律如下:
nyc=dk2(dk1(Hc-H)-)+coscosγ(2)
式中:nyc为法向过载指令;dk1和dk2为比例系数;Hc为飞机高度指令值;H为当前飞机高度; γ为当前飞机滚转角。
(3) 航向通道的过载控制律
根据飞机机动前后航向角变化,可以求出滚转指令γc,航向通道的标识为ψch(ψc),控制律如下:
γc=dk3(ψc-ψ)(3)
式中:γc为滚转指令;dk3为比例系数;ψc为飞机航向指令值;ψ为当前飞机航向。
2.3 典型机动工作的过载控制律设计
(1) 平飞加/减速机动过载控制律设计
加/减速平飞机动在高度通道和航向通道上保持不变,速度通道的速度指令值Vc为该机动样式的机动参数值,控制律如下:
Hch(H)ψch(ψ)Vch(Vc)(4)
(2) 跃升/俯冲机动过载控制律设计
跃升/俯冲机动在速度通道和航向通道上保持不变,高度通道的高度指令值Hc为该机动样式的机动参数值,控制律如下:
ψch(ψ)Vch(V)Hch(Hc) (5)
(3) 水平蛇形机动过载控制律设计
水平蛇形机动在速度通道和高度通道上保持不变,航向通道上的航向指令值采用分段策略,由水平蛇形航向变化值ψd参数进行确定。其中,各分段特征点由水平蛇形幅度Schd参数进行确定。水平蛇形机动轨迹如图3所示,可将水平蛇形机动分为前后两段,两段对称。以AC段为例设计其过载控制律。
图中,F,G两个特征点与机动起始点A的水平横向值为Schd。在AF段,控制律如下:
ψch(ψ0-ψd)Vch(V)Hch(H) (6)
在FG段,控制律如下:
ψch(ψ0+ψd)Vch(V)Hch(H) (7)
在GC段,控制律如下:
ψch(ψ0)Vch(V)Hch(H) (8)
式中:ψ0为目标机动起始时刻的航向角度。
(4) 水平盘旋机动过载控制律设计
水平盘旋机动在速度通道和高度通道上保持不变,航向通道上直接根据机动参数坡度值γ0或过载值确定目标的滚转指令,并根据机动参数盘旋角度确定机动结束时刻,控制律如下:
γc=γ0Vch(V)Hch(H) (9)
(5) 半滚倒转机动过载控制律设计
半滚倒转机动分为两个阶段。前半段为半滚阶段,速度通道和高度通道保持不变,直至实际滚转角与滚轉指令一致,滚转指令180°,控制律如下:
γc=180°Vch(V)Hch(H) (10)
后半段为下拉过载阶段,速度通道保持不变,高度通道的nyc法向过载指令为机动过载参数nyd,航向通道保持滚转指令180°,持续至目标的俯仰角为0°,然后保持水平状态退出机动,控制律如下:
γc=180°Vch(V)nyc=nyd(11)
其他如增速转弯、 筋斗/半筋斗、 下滑倒转、 急规避、 盘旋下降、 急盘降等机动样式的过载控制律与上述设计思路相同,或是几种控制律的组合,本文不再赘述。
3 机动飞行控制量设计
根据飞机性能的不同,过载控制量反映为驾驶杆和油门杆的操纵量不同。按照目标实时机动过程中的法向过载指令值、 切向过载指令值和滚转角指令值,通过飞行控制设计,得到其油门杆操纵量、 升降舵操纵量和副翼操纵量。
3.1 速度通道控制
速度通道控制对应于目标飞机的油门杆操纵量δxc的控制, 在模型设计思路上主要对切向过载指令和实际切向过载的差值进行控制,传递函数结构如图4所示。
3.2 俯仰通道控制
俯仰通道控制对应于目标飞机的升降舵杆操纵量δyc的控制, 在模型设计思路上主要对法向过载指令和实际法向过载的差值进行控制,传递函数结构如图5所示。
3.3 滚转通道控制
滚转通道控制对应于目标飞机的副翼操纵量δzc的控制, 传递函数结构如图6所示。
4 模型仿真实现
4.1 基于JSBSim的过载控制律设计实现
通过对过载控制律和机动飞行控制量设计分析,过载控制律实现主要在于在模型运行过程实时计算法向过载指令值、 切向过载指令值和滚转角指令值,如图7所示。
4.2 基于JSBSim的机动飞行控制量解算实现
飞行控制模型实现主要在于飞行器自动控制XML配置文件的通道设计,如图8所示。
4.3 应用情况
在某型空空导弹鉴定的全数字仿真试验应用过程中,以F-22目标水平转弯机动、 蛇形机动、 半滚倒转和俯冲机动为例,其仿真机动轨迹分别如图9~12所示。结果表明,目标模型的仿真机动轨迹与预期机动样式及机动参数较为吻合。
5 结 论
依托于可扩展的飞行动力学模型框架JSBSim, 研究飞机不同机动方式下的过载控制律模型,设计基于法向过载、 切向过载、 滚转角与飞机升降舵、 副翼及油门杆操纵指令之间关系的飞行控制模型,实现了六自由度、 机动样式可扩展、 开源的通用空中目标机动仿真模型。该目标机动仿真模型可应用于空空导弹鉴定全数字仿真试验、 空战对抗作战使用研究、 试验规划推演等,具有较强的实用性。
参考文献:
[1] 王海青, 程梅, 邴洋海. 雷达型空-空导弹仿真试验研究[J]. 飞机设计, 2008, 28(3): 35-40.
Wang Haiqing, Cheng Mei, Bing Yanghai. Analysis of Simulation Tests for Radar Guided Air-to-Air Missile[J]. Aircraft Design, 2008, 28(3): 35-40.(in Chinese)
[2] 王海青, 程梅. 红外导弹仿真试验研究[J]. 飞机设计, 2009, 29(2): 57-63.
Wang Haiqing, Cheng Mei. A Study of Simulation Test for Infrared Guidance Missile[J]. Aircraft Design, 2009, 29(2): 57-63.(in Chinese)
[3] 顾颉, 孟晶. 仿真试验在水下武器装备试验与评价中的研究分析[J]. 舰船电子工程, 2013, 33(1): 125-127.
Gu Jie, Meng Jing. Research of Simulation in Test and Evaluation of Underwater Weapon[J]. Ship Electronic Engineering, 2013, 33(1): 125-127.(in Chinese)
[4] 余驰, 李建仁, 张钢峰, 等. 机载武器发射系统仿真试验研究[J]. 四川兵工学报, 2015, 36(8): 149-152.
Yu Chi, Li Jianren, Zhang Gangfeng, et al. Simulation and Experi-mentation Study of Airborne Weapon Launch System[J]. Journal of Sichuan Ordnance, 2015, 36(8): 149-152.(in Chinese)
[5] 李嘉林, 胡孟權. 飞机常规机动仿真的过载控制模型设计研究[J]. 飞行力学, 2013, 31(3): 213-216.
Li Jialin, Hu Mengquan. Research on the Design of Load Control Model for Aircraft Conventional Maneuver Simulation[J]. Flight Dynamics, 2013, 31(3): 213-216.(in Chinese)
[6] 李嘉林, 胡孟权, 徐浩军, 等. 基于实现预期空战机动的飞机运动模型[J]. 空军工程大学学报: 自然科学版, 2013, 14(1): 1-4.
Li Jialin, Hu Mengquan, Xu Haojun, et al. Aircraft Dynamic Model for Realizing the Expected Air Combat Maneuvers[J]. Journal of Air Force Engineering University: Natural Science Edition, 2013, 14(1): 1-4.(in Chinese)
[7] 王嘉. 几种典型机动动作的自动飞行仿真研究[D]. 西安: 西北工业大学, 2007.
Wang Jia. Study on Automatic Flight Simulation of Several Typical Maneuvers[D]. Xian: Northwestern Polytechnical University, 2007. (in Chinese)
[8] 王嘉, 高正红. 飞机航路飞行的自动飞行仿真[J]. 飞行力学, 2008, 26(1): 75-78.
Wang Jia, Gao Zhenghong. The Automatic Flight Simulation of Waypoint Flight[J]. Flight Dynamics, 2008, 26(1): 75-78.(in Chinese)
[9] 李世鹏, 高正红. 飞机空战仿真中机动指令生成器设计[J]. 西北工业大学学报, 2005, 23(4): 448-451.
Li Shipeng, Gao Zhenghong. Maneuvering Flight Generator Design in Air to Air Combat Simulation[J]. Journal of Northwestern Polytechnical University, 2005, 23(4): 448-451.(in Chinese)
[10] 刘艳, 高正红, 商重阳. 战斗机综合设计仿真系统中的飞控系统模型[J]. 飞行力学, 2006, 24(4): 22-25.
Liu Yan, Gao Zhenghong, Shang Chongyang. A Flight Control System Model of the Fighter Integrated Design Simulation System[J]. Flight Dynamics, 2006, 24(4): 22-25.(in Chinese)
[11] 袁坤刚, 张靖, 刘波, 等. 目标飞机自主空战战术机动仿真[J]. 中国电子科学研究院学报, 2013, 8(3): 295-299.
Yuan Kungang, Zhang Jing, Liu Bo, et al. Simulation of Target-Aircraft Tactical Maneuvers in Autonomous Aircombat[J]. Journal of China Academy of Electronics and Information Technology, 2013, 8(3): 295-299.(in Chinese)
[12] Berndt J. JSBSim: An Open Source Flight Dynamics Model in C++[C]∥AIAA Modeling and Simulation Technologies Conference and Exhibit, 2004.
[13] Berndt J S. JSBSim: An Open Source, Platform-Independent, Flight Dynamics Model in C++[K/OL].(2011-09-06)[2020-10-30] .www.JSBSim.org.
[14] 马骏, 孙秀霞, 董文瀚. 基于JSBSim的运输机重装空投飞行仿真系统[J]. 计算机应用与软件, 2012, 29(10): 65-68.
Ma Jun, Sun Xiuxia, Dong Wenhan. Flight Simulation System for Transport Aircraft Heavyweight Airdrop Based on JSBSim[J]. Computer Applications and Software, 2012, 29(10): 65-68.(in Chinese)
[15] 岳显, 吉华, 王强, 等. 基于JSBSim模型飞行能力初步评估系统的研究与实践[J]. 计算机应用与软件, 2015, 32(4): 96-99.
Yue Xian, Ji Hua, Wang Qiang, et al. Study and Practice of JSBSim Model-Based Preliminary Flight Ability Evaluation System[J]. Computer Applications and Software, 2015, 32(4): 96-99.(in Chinese)
[16] 劉红, 张雷. 基于JSBSim/Flightgear的六自由度飞行仿真研究[J]. 中国民航飞行学院学报, 2018, 29(3): 44-48.
Liu Hong, Zhang Lei. Research on Six Degrees of Freedom Flight Simulation Based on JSBSim and Flightgear[J]. Journal of Civil Aviation Flight University of China, 2018, 29(3): 44-48.(in Chinese)
Design and Implementation of General Target Aircraft
Maneuver Simulation Model Based on JSBSim
Guo Yajun*,Ding Hua,Yang Dengtai,Zhou Xingdong
(Unit 95972 of PLA,Jiuquan 735018,China)
Abstract:
In the digital simulation for the test and evaluation of the air-to-air missile, the problem of poor scalability and limited maneuver type of target aircraft model is outstanding. To resolve the above problem, the design and implementation of a six-degree-of-freedom target aircraft maneuvers simulation model is presented. Firstly, the control laws of normal overload, tangential overload and roll angle overload under different target maneuvers are designed. Then, the control models of elevator, aileron and throttle of target aircraft are designed. Finally, the implementation of target maneuver simulation model based on open source dynamic model framework of JSBSim is put forward. The target aircraft simulation model is applied to the digital simulation for the test and appraisal of an air-to-air missile, and the result shows that maneuver trajectories of target model are consistent with the expected maneuver type and parameters.
Key words: target aircraft; maneuver simulation model; control law; JSBSim; test and evaluation
收稿日期:2020-10-30
作者简介:郭亚军(1974-),男,陕西商洛人,高级工程师,研究方向为航空武器试验鉴定。
